 控制理论离线作业.docx
控制理论离线作业.docx
- 文档编号:11819802
- 上传时间:2023-04-03
- 格式:DOCX
- 页数:33
- 大小:476.51KB
控制理论离线作业.docx
《控制理论离线作业.docx》由会员分享,可在线阅读,更多相关《控制理论离线作业.docx(33页珍藏版)》请在冰豆网上搜索。
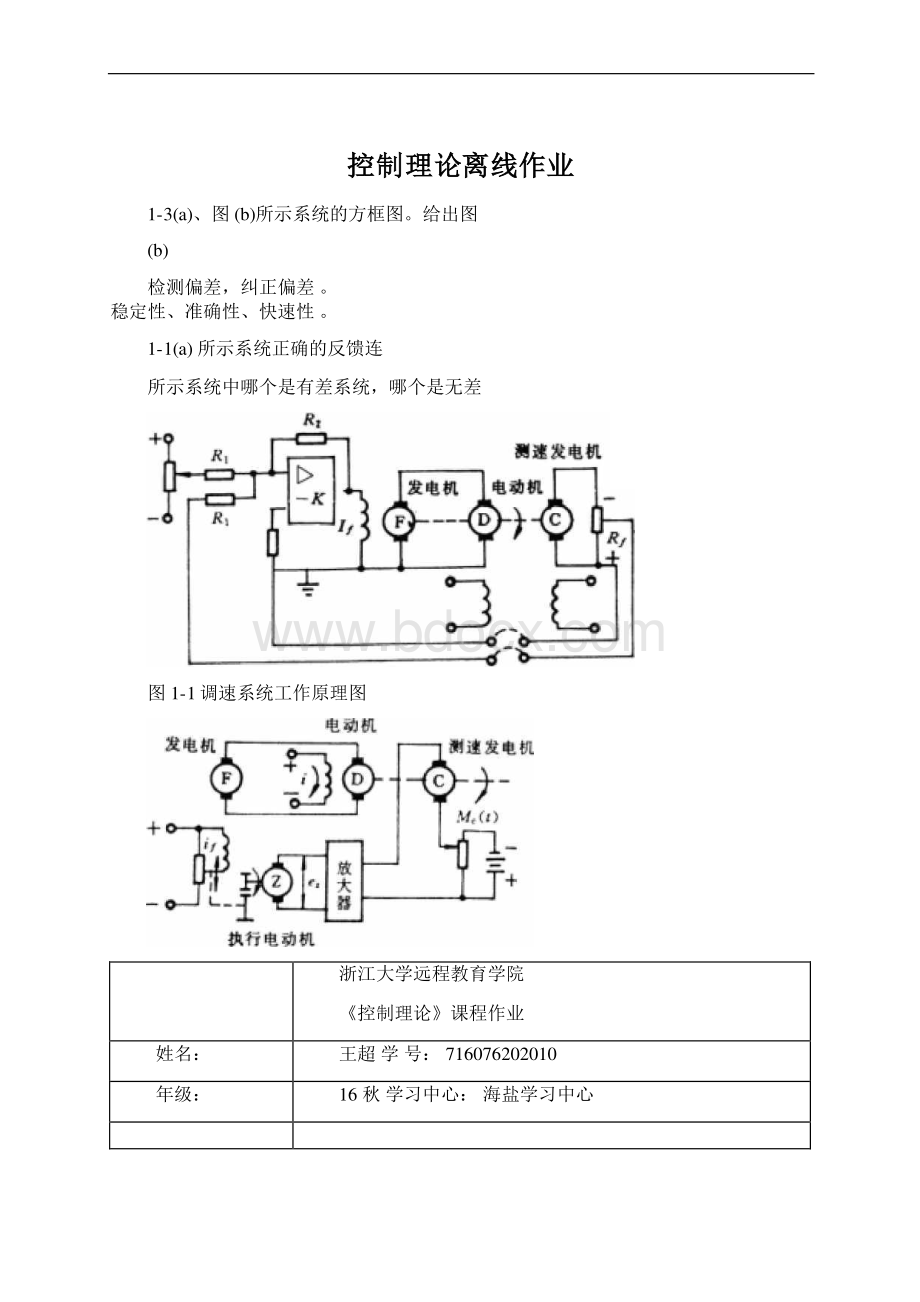
控制理论离线作业控制理论离线作业1-3(a)、图(b)所示系统的方框图。
给出图(b)检测偏差,纠正偏差。
稳定性、准确性、快速性。
1-1(a)所示系统正确的反馈连所示系统中哪个是有差系统,哪个是无差图1-1调速系统工作原理图浙江大学远程教育学院控制理论课程作业姓名:
王超学号:
716076202010年级:
16秋学习中心:
海盐学习中心第一章第一章1-1与开环系统相比,闭环系统的最大特点是:
1-2分析一个控制系统从以下三方面分析:
1-3图1-1(a),(b)所示均为调速系统。
(1)分别画出图线方式。
(2)指出在恒值输入条件下,图1-1(a),系统,说明其道理。
1-4图1-3(a),(b)所示的系统均为电压调节系统。
假设空载时两系统发电机端电压均为110V,试问带上负载后,图1-3(a),(b)中哪个能保持110V不变,哪个电压会低于110V?
为什么?
图1-3电压调节系统工作原理图1-5图1-4是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-4仓库大门自动开闭控制系统1-6控制系统分为两种基本形式开环系统和闭环系统。
1-7负正反馈如何定义?
1-8若组成控制系统的元件都具有线性特性,则称为线性控制系统。
1-9控制系统中各部分的信号都是时间的连续函数,则称为连续控制系统。
1-10在控制系统各部分的信号中只要有一个信号是时间的离散信号,则称此系统为离散控制系统。
第二章第二章(t)为输C(电2-1试建立图2-1所示各系统的微分方程。
其中外力F(t),位移x(t)和电压urf(阻尼系数),R(电阻),入量;位移y(t)和电压uc(t)为输出量;k(弹性系数)容)和m(质量)均为常数。
+2-2试证明图2-2中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
2-3假设某容器的液位高度h与液体流入量Qr满足方程ddhtSh1SQr,式中S为液位容器的横截面积,为常数。
若h与Qr在其工作点(Qr0,h0)附近做微量变化,试导出h关于Qr的线性化方程。
2-5求下列各拉氏变换式的原函数。
(1)X(s)ses1
(2)X(s)13s(s2)3(s3)(3)X(s)s12s(s22s2)2-6已知在零初始条件下,系统的单位阶跃响应为c(t)12e2tet,试求系统,试求系统的传递函数和脉冲响应。
2-7已知系统传递函数已知系统传递函数C(s)22,且初始条件为,且初始条件为c(0)1,c(0)0,试,试R(s)s23s2求系统在输入r(t)1(t)作用下的输出c(t)。
2-8求图2-4所示各有源网络的传递函数Uc(s)Ur(s)2-9某位置随动系统原理框图如图2-5所示,已知电位器最大工作角度Qm3300,功率放大器放大系数为k3。
(1)分别求出电位器的传递函数k0,第一级和第二级放大器的放大系数k1,k2;
(2)画出系统的结构图;(3)求系统的闭环传递函数Qc(s)Qr(s)。
2-10飞机俯仰角控制系统结构图如图2-7所示,试求闭环传递函数Qc(s)Qr(s)。
2-11已知系统方程组如下:
X1(s)G1(s)R(s)G1(s)G7(s)G8(s)C(s)X2(s)G2(s)X1(s)G6(s)X3(s)X3(s)X2(s)C(s)G5(s)G3(s)C(s)G4(s)X3(s)试绘制系统结构图,并求闭环传递函数C(s)。
R(s)2-12试用结构图等效化简求图2-9所示各系统的传递函数C(s)R(s)2-13已知控制系统结构图如图2-11所示,求输入r(t)31(t)时系统的输出c(t)。
2-14试绘制图2-12所示系统的信号流图。
2-15试绘制图2-14所示信号流图对应的系统结构图。
2-16试用梅逊增益公式求2-12题中各结构图对应的闭环传递函数。
2-17试用梅逊增益公式求图2-16中各系统的闭环传递函数。
2-18已知系统的结构图如图2-17所示,图中R(s)为输入信号,N(s)为干扰信号,试求传递函数C(s),C(s)。
R(s)N(s)2-19如图2-18所示,已知单位负反馈系统开环传递函数G(s)1s(s3)且初始条件为c(0)1,c(0)0。
试求:
1)系统在r(t)1(t)作用下的输出响应c(t);2)系统在r(t)2(t)2t作用下的静态误差essR(s)1C(s)s(s3)图2-18求:
(1)
(2)2-20系统如图系统的微分方程系统的传递函数2-19所示图2-19系统初值为0)第三章第三章3.1已知二阶系统闭环传递函数为GB362s29s36试求单位阶跃响应的tr,tm,%,ts和振荡次数N的数值?
3.2设单位反馈系统的开环传递函数为GK(s)1s(s1)试求系统的性能指标,峰值时间,超调量和调节时间。
3.3%=25%,峰值时间如图31所示系统,假设该系统在单位阶跃响应中的超调量tm=0.5秒,试确定K和的值。
X(s)图313.4已知系统的结构图如图32所示,若x(t)21(t)时,试求:
(1)当=0时,系统的tr,tm,ts的值。
(2)当0时,若使=20%,应为多大。
图323.5设单位反馈系统的开环传递函数为GK(s)Ks(Ts1)若T=0.1秒,试求开环放大系数K=10/s和K=20/s时:
(1)阻尼比及无阻尼自然振荡角频率n。
(2)单位阶跃响应的超调量%和调节时间ts。
3.6
(1)什么叫时间响应
(2)(3)(4)时间响应由哪几部份组成?
各部份的定义是什么?
系统的单位阶跃响应曲线各部分反映系统哪些方面的性能?
时域瞬态响应性能指标有哪些?
它们反映系统哪些方面的性能?
3.7设系统的特征方程式为s46s312s211s60试判别系统的稳定性。
3.8设系统的特征方程式为s32s2s203.9系统特征方程式为s62s58s412s320s216s160试判别系统的稳定性。
3.10单位反馈系统的开环传递函数为Gk(s)Ks(0.1s1)(0.25s1)试求k的稳定范围。
3.11已知开环传递函数分别为10s(s1)10s(2s1)的两个系统,试求它们的静态误差系数和动态误差系数以及输入为x(t)R0R1tR2t时的稳态误差(其中R0、R1、R2均为正常数)。
3.12单位反馈控制系统的开环传递函数为GK(s)1000,试求在输入信号为Ks(s10)x(t)12t作用时的稳态误差。
3.13
(1)系统的稳定性定义是什么?
(2)系统稳定的充分和必要条件是什么?
(3)误差及稳态误差的定义是什么?
3.14设控制系统如图33所示,其中输入信号x(t)t,扰动信号,扰动信号n(t)1(t),试计,试计算该系统的稳态误差。
X(s)E(s)图333.15已知单位反馈随动系统如图3-4所示。
若K16,T0.25s。
试求:
1)典型二阶系统的特征参数和n;2)暂态特性指标Mp和ts(500);3)欲使Mp160,当T不变时,K应取何值。
R(s)KC(s)s(Ts1)图3-4随动系统结构图3.16设二阶控制系统的单位阶跃响应曲线如图3-5所示。
如果该系统为单位反馈控制系统,试确定其开环传递函数及闭环传递函数。
c(t)图3-5单位阶跃响应曲线3.17控制系统框图如图3-6所示。
要求系统单位阶跃响应的超调量M9.5%Mp9.5%,且峰值时间tp0.5s。
试确定K1与的值,并计算在此情况下系统上升时间tr和调整时间ts(200)。
图3-6控制系统框图3.18设系统的特征方程式分别为1s42s33s24s50s42s3s22s103s5s43s33s22s20试用劳斯稳定判据判断系统的稳定性。
3.19已知系统结构图如图3-7所示,试确定使系统稳定的K值范围。
3.20已知单位反馈控制系统的开环传递函数如下。
R(s)Ks(s1)(s2)C(s)1)10s(0.1s1)(0.5s1)10(sa)G(s)s2(1s0(s1)(sa)5)(a0.5)试求:
1静态位置误差系数Kp、静态速度误差系数Kv和静态加速度误差系数Ka;22求当输入信号为r(t)1(t)4tt时的系统的稳态误差。
3.21设控制系统如图3-8所示,输入信号试求使ess0.5的K值取值范围。
3.22设控制系统如图所示r(t)rt46t3t2.求求ess3.23设单位反馈系统的开环传递函数为G(s)Ks(sa)若要求系统的阶跃响应的瞬态性能指标为p,10%,ts(5%)2试确定参数K和a的值。
第四章第四章4-1设单位反馈系统的开环传递函数为G(s)K*(s2)s(s1)试从数学上证明:
复数根轨迹部分是以(4-2单位反馈系统的开环传递函数为G(s)K(s1)s(s2)(s3)试绘制闭环系统的概略根轨迹。
-2,0j)为圆心,以2为半径的一个圆。
4-3设某负反馈系统的开环传递函数为G(s)H(s)2K(s1),试绘制该系统的根轨迹s2(0.1s2)图。
4-4以知系统开环传递函数G(s)H(s)Ks(s4)(s24s20)试绘制闭环系统的根轨迹。
G(s)K(1s),k的变换范围为0,试绘s(s2)1(sa)G(s)42,a的变化范围为0,,试绘s2(s1)4-5单位反馈控制系统的开环传递函数为制系统根轨迹。
4-6以知单位反馈系统的开环传递函数为制系统的闭环根轨迹。
4-7.已知开环零、极点分布如图46所示。
试概略绘制相应的闭环根轨迹图。
4-8.已知系统开环传递函数G(s)K*(s3)s(s1)试作K*从0的闭环根轨迹,并证明在s平面内的根轨迹是圆,求出圆的半径和圆心。
4-9.设单位反馈控制系统开环传递函数G(s)Ks(0.2s1)(0.5s1)试概略绘出系统根轨迹图(要求确定分离点坐标d)。
4-10设单位反馈控制系统开环传递函数(要求确定分离点坐标d)。
G(s)K*(s5)s(s2)(s3)试概略绘出系统根轨迹图4-11已知单位反馈系统的开环传递函数根轨迹图(要求算出出射角)。
G(s)K*(s2)(s1j2)(s1j2)试概略绘出系统的4-12.已知单位反馈系统的开环传递函数统的根轨迹图(要求算出出射角)。
G(s)K*(s20)s(s10j10)(s10j10),试概略绘出系4-13已知系统如图412所示。
作根轨迹图,要求确定根轨迹的出射角和与虚轴的交点。
并确定使系统稳定的K值的范围。
4-14设系统开环传递函数G(s)20(s4)(sb)试作出b从0变化时的根轨迹。
4-15设系统的闭环特征方程2s2(sa)K(s1)0(a0)
(1)当a10时,作系统根轨迹,并求出系统阶跃响应分别为单调、阻尼振荡时(有复极点)K的取值范围。
(2)若使根轨迹只具有一个非零分离点,此时a的取值?
并做出根轨迹。
(3)当a5时,是否具有非零分离点,并做出根轨迹。
4-16.试作图416所示系统K从0时的系统根轨迹图,并确定使系统稳定的K值范围。
1)4-17.做出图418所示系统的根轨迹,图中H(s)分别为H(s)12)H(s)s1(3)H(s)s34-18设控制系统如图420所示,为了使系统闭环极点为s1,21j3,试确定增益K和速度反馈系数Kh的数值,并利用Kh值绘制系统的根轨迹图。
4-19为了使图422所示系统的闭环极点的希望位置为s1,21.6j4,在前向通路中串入一个校正装置作补偿,其传递函数为Gc(s)s2.5sa图中G(s)s(s1)试确定
(1)所需的a值。
(2)所希望的闭环极点上的K值。
(3)第三个闭环极点的位置。
4-20设负反馈系统的开环传递函数为1)G(s)K*(s2)s(s1)(s3)试作系统的根轨迹。
2)求当0.5时,闭环的一对主导极点值,并求其K及另一个极点。
3)求出满足
(2)条件下的闭环零、极点分布,并求出其在阶跃作用下的性能指标。
4-21系统的开环传递函数为G(s)s(s2)(s22s2)试绘制系统的根轨迹,并确定系统输出为等幅振荡时的闭环传递函数。
第五章第五章5-1设一线性系统的传递函数为G(s)210(s1)10(s1)s24s20(s2j4)(s2j4)5-1试绘制该系统的幅频和相频特性曲线。
5-2试绘制下列开环传递函数的奈奎斯特曲线:
10G(s)H(s)(1s)(10.1s)5-3已知型系统、型系统和II型系统的开环传递函数分别为K1010G0(s)K3、G1(s)10、G2(s)2100(1s)31s(1s)2s2(1s)试绘制它们对应的奈氏图。
5-4已知一反馈控制系统的开环传递函数为G(s)H(s)1s0(1(100.5.1ss)s(10.5s)试绘制开环系统的伯德图。
5-5系统的开环传递函数为5G(s)H(s)(s0.5)(s1)(s2)试用奈氏判据判别闭环系统的稳定性。
5-6反馈控制系统的开环传递函数为10G(s)H(s)s(1s1)0(s2)试判别该系统的稳定性。
5-7已知系统的开环传递函数为K(T2s1)G(s)H(s)22s2(T1s1)试分析时间常数T1和T2的相对大小对系统稳定性的影响,并画出它们所对应的奈氏图。
5-8已知一单位反馈系统的开环传递函数为KG(s)H(s)Ts1试用奈氏判据确定该闭环系统稳定的K值范围。
5-9设一时滞控制系统如图5-12所示。
已知图中的G1(s)1/s(s1)(s2),试分析滞后时间对系统稳定性的影响。
5-10已知单位负反馈最小相位系统A的开环频率特性曲线如图所示,
(1)试求系统A的开环传递函数,并计算相位裕量;
(2)如把曲线1的abc改为abc而成为系统B,试定性比较A与B的性能。
5-11若某二阶环节的为正值的幅相特性如图所示,图a中A点频时幅相特性的实部为-2a,a为大于零的常数。
求:
1)开环传递函数;2)若a1,试求1、25-12已知一单位反馈系统的开环传递函数为KG(s)s(10.2s)(10.05s)试求:
(1)K1时系统的相位裕量和增益裕量。
(2)要求通过增益K的调整,使系统的增益裕量20lgKg20dB,相位裕量40。
5-13已知二个控制系统的传递函数分别为系统系统I:
C(s)1,系统,系统:
C(s)1R(s)s1R(s)3s1试比较两个系统带宽的大小,并验证具有较大带宽的系统比具有较小带宽的系统响应速度快,对输入信号的跟随性能好。
5-14某一阶环节的为正值的幅相特性曲线如图所示,写出其传递函数。
5-15已知系统的开环传递函数为应用奈氏判据判断闭环系统的稳定性。
G(s)H(s)K(s1)s(s1),K05-16设开环系统Nyquist曲线如下图所示,要求
(1)判断闭环系统稳定性,并简要说明理由。
(2)如系统不稳定,试求出位于s右半平面的闭环极点数。
5-17单位反馈系统开环对数幅频特性如右图,试求系统的闭环传递函数(s)。
5-18单位反馈系统开环传递函数为90s(0.1s1)试求闭环频率特性指标Mr和r。
35-19系统开环传递函数为G(s)H(s),要求
(1)绘制系统Nyquists(s1)()(s2)曲线;
(2)从图中求出系统相角裕量和幅值裕量Kg;(3)判断系统稳定性;(4)使系统稳定的开环放大系数K的范围。
5-20系统开环传递函数为KG(s)H(s)s(0.2s1)()(0.1s1)要求
(1)绘制系统K=10时的Bode图;
(2)从图中求出系统的相角裕量、幅值裕量Kg(dB)和幅值穿越频率c。
(3)为使Kg(dB)=20dB,K应为多大?
(4)为使=30o,K应为多大?
第六章第六章6-1G0(s)ks(0.5s1)要求kv2050m10dB6-2某一单位反馈系统的开环传递函数为G(s)4K,设计一个超前校正装s(s2)置,使校正后系统的静态速度误差系数Kv20s1,相位裕度50,增益裕度20lgh不小于10dB。
6-3控制系统如图6-3所示。
若要求校正后的静态速度误差系数等于30s1,相位裕度不低于40,幅值裕度不小于10dB,截止频率不小于2.3rad/s,设计串联校正装置。
R(s)Ks(0.1s1)(0.2s1)C(s)图6-3控制系统6-4未校正系统开环传递函数为设计校正装置,使系统满足下列性能指标:
G0(s)1Kv1。
s(16s1)(21s1)在最大指令速度为180/s时,位置滞后误差不超过1;相位裕度为453;幅值裕度不低于10dB;过渡过程调节时间不超过3s。
6-5已知某一单位反馈控制系统如图6-6所示。
设计一串联校正装置Gc(s),使校正后的系统同时满足下列性能指标要求:
跟踪输入r(t)21t2时的稳态误差为0.1;相位裕度为45r(t)Gc(s)1sc(t)图6-6单位反馈控制系统6-6已知某一控制系统如图6-7所示,其中Gc(s)为PID控制器,它的传递函数K为Gc(s)KpiKds,要求校正后系统的闭环极点为10j10和-100,确定sPID控制器的参数Kp,Ki和Kd图6-74s(s2)6-7单位反馈系统G0(s)G0(s)要求指标:
0.5n=4G0(s)+6-8超前校正的原理是:
。
6-9滞后校正的原理是:
6-10滞后-超前校正原理:
。
6-11设有一单位反馈控制系统,其开环传递函数为Gk(s)4ks(s2)要求稳态速度误差系数KV20(1s),相位裕量不小于50。
,增益裕量不小于10(dB),试设计一超前校正装置,满足要求的性能指标。
6-12设单位反馈系统的开环传递函数Gk(s)Ks(0.2s1)(0.5s1)要求的性能指标为:
Kv201/s,相角裕量不低于35o,增益裕量不低于10db,试求串联滞后校正装置的传递函数。
6-13设某单位反馈系统,其开环传递函数Gk(s)Ks(s1)(0.125s1)要求Kv20(1s),相角裕量500,剪切频率c2,试设计串联滞后一超前校正装置,使系统满足性能指标要求。
6-14位置随动系统如图611所示,其中KGk(S)ks(0.9s1)(0.007s1)要求串入校正装置Gc(s),使系统校正后满足下列性能指标:
(1)系统仍为I型,稳态速度误差系数Kv1000(1s),
(2)调节时间ts025(s),超调量P%30。
Y(s)U(s)Gk(s)图611位置随动系统6-15设系统如图613(a)所示,其开环传递函数Gk(s)Ks(s2)(s5)要求校正后系统稳态速度误差系数不小于5(1s),单位阶跃响应超调量不大于40,调节时间小于6s。
试求校正装置的传递函数。
图613控制系统6-16设某单位反馈系统的开环传递函数Gk(s)4s(s0.5)要求闭环主导极点的阻尼比0.5,无阻尼自然振荡频率n5(rads),稳态速度误差系数Kv50(1/s)。
试设计校正装置,串入系统后能满足上述性能指标。
6-17系统如图618所示,原系统开环传递函数为Gk(s)G1(s)G2(s)G3(s)K1K20.007s10.9s1K3sKs(0.007s1)(0.9s1)KV1000(1式中KK1K2K3。
要求采用局部反馈校正,使系统满足以下性能指标:
s),调节时间ts0.8s,超调量%25%。
6-18设随动系统如图621所示,图中K1为综合放大器的传递系数,1(T1s1)为滤波器的传递函数,Kms(Tms1)为执行电机的传递函数N(s)为负载力矩,即本系统的扰动量。
要求选择适当的前馈补偿装置GN(s),使系统输出不受扰动影响。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 控制 理论 离线 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
关于交通事故损害赔偿的几个热点问题Word格式.docx
-
C7050塔吊起重性能参数Word格式文档下载.docx
-
环境管理吨医院废水方案Word文件下载.docx
-
改版后最新人教版数学六年级下导学案docWord文档下载推荐.docx
-
机动车驾驶员培训机构申请表Word格式文档下载.docx
-
精神卫生中心新建工程可行性研究报告文档格式.docx
-
海南侨中三亚学校学年七年级上学期期中考试地理试题解析解析版Word文档格式.docx
-
中医实习报告4篇Word文档格式.docx
-
的会计学练习题附答案Word格式文档下载.docx
-
妊娠期糖尿病孕妇一周食谱仅供参考Word格式文档下载.docx
-
公务员面试经典试题集锦一Word格式文档下载.docx
-
第三讲大学生学习心理与创造力培养Word下载.docx
-
桌面背景设置为Flash动画及方法1Word下载.docx
-
控烟监督员巡查员工作记录簿表文档格式.docx
-
5A Unit3教案Word格式文档下载.docx
-
都江堰导游词精选6篇Word文档下载推荐.docx
-
第二学期班主任周工作计划docWord文档格式.docx
-
医院流程图汇总Word格式.docx
-
应急演练评估总结Word文档下载推荐.docx
