 车辆混合动力系统的结构分析与动力控制Word文档下载推荐.docx
车辆混合动力系统的结构分析与动力控制Word文档下载推荐.docx
- 文档编号:16638019
- 上传时间:2022-11-25
- 格式:DOCX
- 页数:8
- 大小:1.48MB
车辆混合动力系统的结构分析与动力控制Word文档下载推荐.docx
《车辆混合动力系统的结构分析与动力控制Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《车辆混合动力系统的结构分析与动力控制Word文档下载推荐.docx(8页珍藏版)》请在冰豆网上搜索。
混合动力汽车是指采用两种和两种以上的储能器、能源或转换器作驱动能源的车辆[2],当前比较普遍的方案是采用发动机和动力蓄电池的组合,动力蓄电池通过电动机提供辅助动力或全部驱动力,另外还能实现制动能量回收。
如何实现混合动力汽车发动机、电动机、蓄电池三者之间的良好匹配和优化控制,是发展混合动力汽车必须解决且尚未完全解决的技术难题。
1 动力系统结构分析
HEV采用两种或两种以上的能源来提供动力,需要采用动力复合装置来有效的实现多种动力的耦合。
行星齿轮机构由于具有结构紧凑、传动比大、效率高和工作可靠的优点,在车辆传动和动力复合等方面得到了广泛的应用[3]。
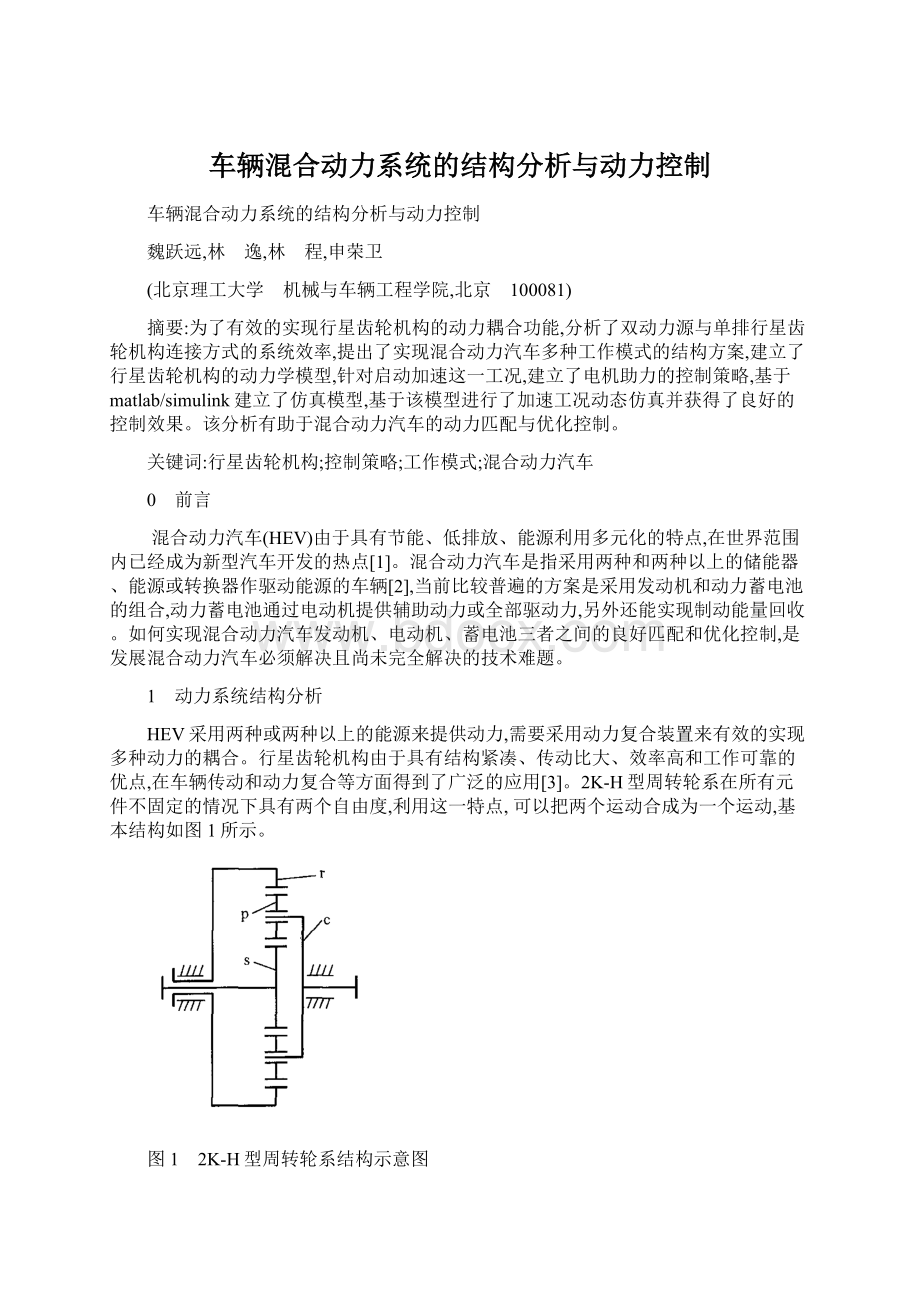
2K-H型周转轮系在所有元件不固定的情况下具有两个自由度,利用这一特点,可以把两个运动合成为一个运动,基本结构如图1所示。
图1 2K-H型周转轮系结构示意图
图1中c、r、s、p分别代表行星架、齿圈、太阳轮、行星轮。
行星架、齿圈、太阳轮均可作为主动件或从动件,不同约束下周转轮系的效率如表1所示[4]。
其中ζ为转化机构的效率,α为齿圈与太阳轮的齿数之比。
即:
α=zr/zs。
zr、zs分别为齿圈与太阳轮的齿数。
表1 周转轮系的效率
表中,ηc为行星架固定下轮系的效率;
ηr为齿圈固定下轮系的效率;
ηs为太阳轮固定下轮系的效率。
一般来说,zr>
zs,对比表1中3个公式可得:
ηc<
ηr<
ηs
(1)
从表1可以看出,以行星架作为输出轴时轮系的效率较高。
混合动力汽车一般是以发动机作为主动力源,电机作为辅助动力来平滑发动机功率的波动,车辆大部分时间是工作在发动机驱动模式下,采用发动机与齿圈连接,可以使周转轮系在最大的工作时间范围内有最大的效率ηs;
在双动力混合驱动模式下,周转轮系的效率介于ηr和ηs之间,效率也比较高;
纯电机驱动模式下的轮系效率为ηr;
在能量回收模式下,行星架为主动件,太阳轮为从动件,轮系的效率为ηr。
因此,采用发动机连接齿圈、电机连接太阳轮,行星架连接变速器输入轴的结构方式,可以获得较高综合效率。
本文采用的动力系统布置如图2所示,与丰田prius采用的动力系统机构相比,具有尺寸小、结构简单的特点,不需要单独采用发电机来提供电能给电池充电,但对于各种工作模式的切换提出了更高的要求。
混合动力汽车有多种工作模式,如发动机和电动机混合驱动模式(混合驱动)、发动机驱动电池充电(机驱电充)模式、电动机驱动模式、发动机驱动模式、能量回收模式等,同一类模式还可进一步细分[2]。
图2 动力系统结构示意图
周转轮系中所有齿轮都处于常啮合状态,必须通过不同方式对其基本元件进行约束(即固定和连接某些基本元件)来实现多种工作模式。
对这些基本元件实施约束的机构主要由离合器、制动器和单向离合器等3种执行元件来实现。
图2所示的动力系统通过2个离合器(C、F)和3个制动器(B1、B2、B3)状态的组合来实现混合动力汽车的多种工作模式。
组合状态图如表2所示,其中O表示离合器处于锁止状态,X表示离合器处于解锁状态。
F为单向离合器,用来限制在同一方向上,电机的转速不能超过发动机的转速。
表2 工作模式
2 动力学模型
选取齿圈r角位移θr、太阳轮s角位移θs为广义坐标,相应的角速度即为广义速度,即ωs=.θs,ωr=θR,根据周转轮系的传动比公式[5],可以得出齿圈r与太阳轮s的传动比关系如下:
(ωs-ωc)/(ωr-ωc)=-Zr/Zs=-α
(2)
采用计算外力功率的方法来计算广义力,由拉格朗日方程可得系统的运动微分方程:
(3)
式中,F1、F2为广义力,与齿圈转矩Tr、太阳轮转矩Ts、行星架转矩Tc及齿数比α的关系如下:
F1=Tr+α1+αTc,
F2=Ts+11+αTc,(4)
J11=Jr+α1+α2Jc,
J12=α(1+α)2Jc,
J22=Js+1(1+α)2Jc,(5)
式中,J11、J12、J22为系统的等效转动惯量;
Jr为齿圈的转动惯量;
Js为太阳轮的转动惯量;
Jc为行星架转动惯量。
3 控制策略与结果分析
由于行驶工况的多样性,混合动力汽车需要在各种工作模式之间进行切换[6],以取得特定工况下更好的动力性或经济性,工作模式的改变会影响动力的稳定传递,严重的不稳定会破坏动力系统的正常运转。
因此,实现各种模式之间的平稳切换,对提高车辆的使用性能至关重要。
电动机具有起动扭矩大的特点,适合于车辆在起步加速过程中提供辅助动力,能够改善车辆启动加速的平顺性[7],本文对助力车辆起步加速这一过程进行仿真分析。
由于电动机的反应时间要比发动机要快,因此在加速过程中采用电动机的输出参数作为控制目标,可以获得更好的控制效果。
控制目标是[8]:
利用周转轮系无级调速的功能,以电动机和发动机转速差及其变化率为控制参数,以电动机输出转矩为控制变量,提高车辆的起步加速平稳性。
具体起步过程如下:
ATM挡位置于D,制动器B3处于锁止状态,发动机工作在最低稳定转速下,M/G工作在发电模式下,向动力电池组充电,当踩下加速踏板,制动器B3解锁后,M/G根据控制指令由发电模式切换到电动模式,输出转矩。
同时发动机转速也开始上升,当发动机转速升至目标转速之后,电动机输出转矩开始减小,而电机转速继续增加,当发动机转速与电动机转速之差小于目标转速差之后,离合器C结合,同时根据加速踏板的行程大小或车速的高低,电动机将关闭或继续输出动力,车辆进入发动机单独驱动模式或混合驱动模式。
在这一过程中,由于制动器的解锁和离合器的结合,会影响动力传递的平稳性,因此必须对该结合过程进行有效的控制。
基于matlab/simulink建立了电机目标转矩Tmg-tr计算流程,如图3所示。
Teg-es为发动机估计转矩,可以通过发动机转速和油门开度两个参数查表获得。
Teg-es通过低通滤波器转换为Teg-fi,滤波器是用来平滑发动机输出转矩的变化。
Tmg-re是电机参考转矩,与发动机转速和节气门开度有关,三者之间的关系曲线与图4所示,其中n0为发动机的最低稳定转速。
图3 电机目标转矩仿真模型
图4 电机转矩与发动机转速及油门开度的关系曲线
图3中,Tmg-co是电机转矩修正值,其计算流程如图5所示。
流程中Kmg-bf称为同步前电机转矩矫正因子,与电机转速与发动机转速之比e有关,关系如图6所示。
Kmg-af称为同步后电机转矩矫正因子,计算公式如下:
Kmg-af=(αJeg-Jmg)/(1+α),(6)
式中,Jeg为发动机的转动惯量;
Jmg为电机的转动惯量。
dTmg-li是与发动机转速相关的电机转矩变化上限值,关系如图7所示,当发动机转速较低时,电机转矩增量空间较大,在发动机高转速区,电机的助力作用比较小。
图5 电机目标转矩计算流程图
图6 Kmg-bf与e的关系图 图7 dTmg-li与发动机转速的关系
仿真结果如图8所示。
图8(a)过程分析:
在时间t0,制动踏板被踩下,行星架转速为零,发动机转速处于低速运转状态,电机转速与发动机转速相反,两者转速之比等于-1/a。
在时间t1,制动踏板释放,制动转矩消失,发动机转速上升,行星架转速也随之上升,车辆进入过渡阶段,在此期间,发动机转矩和行星架转矩减小。
在时间t2,加速踏板开始作用,电机开始加载。
在时间t3,速比e大于e0时,Kmg-bf从零开始增加,电机调节开始起作用,发动机转速和转矩进入稳定期。
同时由于电机转速继续增加,ddn/dt开始小于零,dTmg-bf小于零,因此电机转矩开始下降。
在时间t4,发动机与电动机的转速差小于设定值,Kmg-af开始作用,电机转矩有一个阶跃下降,紧接着离合器C开始结合,周转轮系由两个自由度转换为一个自由度,太阳轮、此圈、行星架成为一个整体,开始以平稳的转速上升。
对比图8(a)与图8(b)转速曲线可以看出,两者的速比变化趋势是一致的,但图8(b)由于没有采用电机转矩修正控制,在t3时间离合器结合后,行星架转速出现了波动,这种波动会给启动的平顺性和舒适性带来不良影响。
因此,采用电机转矩控制能有效的改善车辆启动加速的平顺性和舒适性。
图8 仿真结果
4 结论
(1)对发动机、电动机/发电机与周转轮系的连接方案进行分析,其中采用发动机连接齿圈、电动机/发电机连接太阳轮可以获得较高的综合效率。
(2)提出了实现混合动力汽车多种工作模式的动力系统结构方案,并建立了动力系统数学模型。
(3)建立了车辆启动加速过程中电机转矩的控制策略,仿真结果表明该控制策略能有效的改善车辆启动加速过程的平顺性和舒适性。
参考文献:
[1] 岳东鹏,郝志勇,张俊智·
混合动力电动汽车研究开发及前景展望[J]·
拖拉机与农用运输车,2004,
(2):
1-4
[2] 陈清泉,孙逢春,祝嘉光·
现代电动汽车技术[M]·
北京:
北京理工大学出版社,2002
[3] 魏跃远,林逸,林程,何洪文·
双排行星齿轮机构在混合动力汽车上的应用研究[J]·
汽车技术,2005,(8):
11-14
[4] 许洪基,雷光·
现代机械传动手册[M]·
北京机械工业出版社,2002
[5] 申永胜·
机械原理教程[M]·
清华大学出版社,1999·
[6] ANTONISZUMANOWSKI·
混合电动车辆基础[M]·
北京理工大学出版社,2001
[7] 何洪文·
混合动力车辆驱动系研究和控制策略分析[D]·
北京理工大学机械与车辆工程学院,2003
[8] KENJINAKASHIMA,SHIZUOKA·
ParallelHybridElectricVehicle[P]·
PatentNo·
:
6622805B2,2003·
140


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 车辆 混合 动力 系统 结构 分析 控制
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《雷雨》中的蘩漪人物形象分析 1.docx
《雷雨》中的蘩漪人物形象分析 1.docx
-
《经济法基础》第三章章节练习与答案解析.docx
-
安徽省合肥市包河区卫生健康系统招聘试题及答案解析.docx
-
《河中石兽》复习过程.docx
-
版二级建造师《公路工程管理与实务》考前检测 附答案.docx
-
保密安全制度监理组5篇修改版.docx
-
北师大版届九年级上学期期末考试英语试题I卷.docx
-
PACE产品及周期优化法系统结构复习课程.docx
-
常规变电站常规设计.docx
-
初三欧姆定律计算题题型整理.docx
-
《测绘管理与法律法规》模拟试题一附答案.docx
-
2测风工岗位练兵技术比武.docx
-
《小学语文不同课型的教学模式参考》1.docx
-
15高考宁夏英语及答案教学内容.docx
-
ABS圆形笔筒课程设计说明书.docx
-
c语言程序填空题.docx
-
茶艺师高级三级教学计划大纲.docx
-
场平土石方工程施工项目组织设计.docx
-
《人力资源管理》期末试题及答案教学内容.docx
-
《河南省高等学校教师实验人员中高级专业技术职务任职资格申报评审条件试行.docx
-
01钢结构制作施工工艺标准文档.docx
-
IIR数字滤波器的设计流程图.docx
-
005纺丝作业指导书.docx
-
1991高考化学试题.docx
-
GMP审核检查表与审核员指南.docx
-
成本会计试题二.docx
-
14001讲师心态调整培训讲座讲义体验版共14页文档.docx
-
cpld矩阵键盘.docx
-
《金融服务营销》.docx
-
NHR100过程校验仪140408.docx
-
Q+ Web 改版设计小结.docx
-
八年级上册古诗词鉴赏含参考答案.docx
-
幼儿运动中运动量的判断.docx
-
发改局领导班子述职报告范文.docx
-
施工总进度说明书及附图.docx
-
XX县烟草专卖局综合业务用房建设项目可行性研究报告.docx
-
植物分类表 1.docx
-
框架涵现浇施工方案.docx
-
房产证抵押贷款合同.docx
-
高二物理下学期期末考试试题14.docx
-
人教版七年级下学期生物 第一章第1节 人类的起源和发展 同步练习包含答案.docx
-
大庆湿地旅游纪念品系统开发设计毕业设计.docx
-
芙蓉区公办幼儿园办学水平督导评估自查评分表.docx
-
云雾室型极早期火灾探测器与光电型探测器的差异.docx
-
中华诗词经典名句集锦.docx
-
七年级英语初中英语记叙文阅读理解附答案.docx
-
第一章施工方案与技术措施.docx
-
载波集中抄表系统方案.docx
-
Elearning在线学习需求分析报告.docx
-
华南理工网络教育会计信息系统随堂练习及参考答案.docx
-
战争与人 刘铁生 我在中印 中越前线拍摄战争生态.docx
