 ABB机器人码垛程序范本模板Word格式文档下载.docx
ABB机器人码垛程序范本模板Word格式文档下载.docx
- 文档编号:16926015
- 上传时间:2022-11-27
- 格式:DOCX
- 页数:68
- 大小:25.70KB
ABB机器人码垛程序范本模板Word格式文档下载.docx
《ABB机器人码垛程序范本模板Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《ABB机器人码垛程序范本模板Word格式文档下载.docx(68页珍藏版)》请在冰豆网上搜索。
ClkStopCLK2;
ENDIF
Else
ClkStopCLK2;
EndIF
Endproc
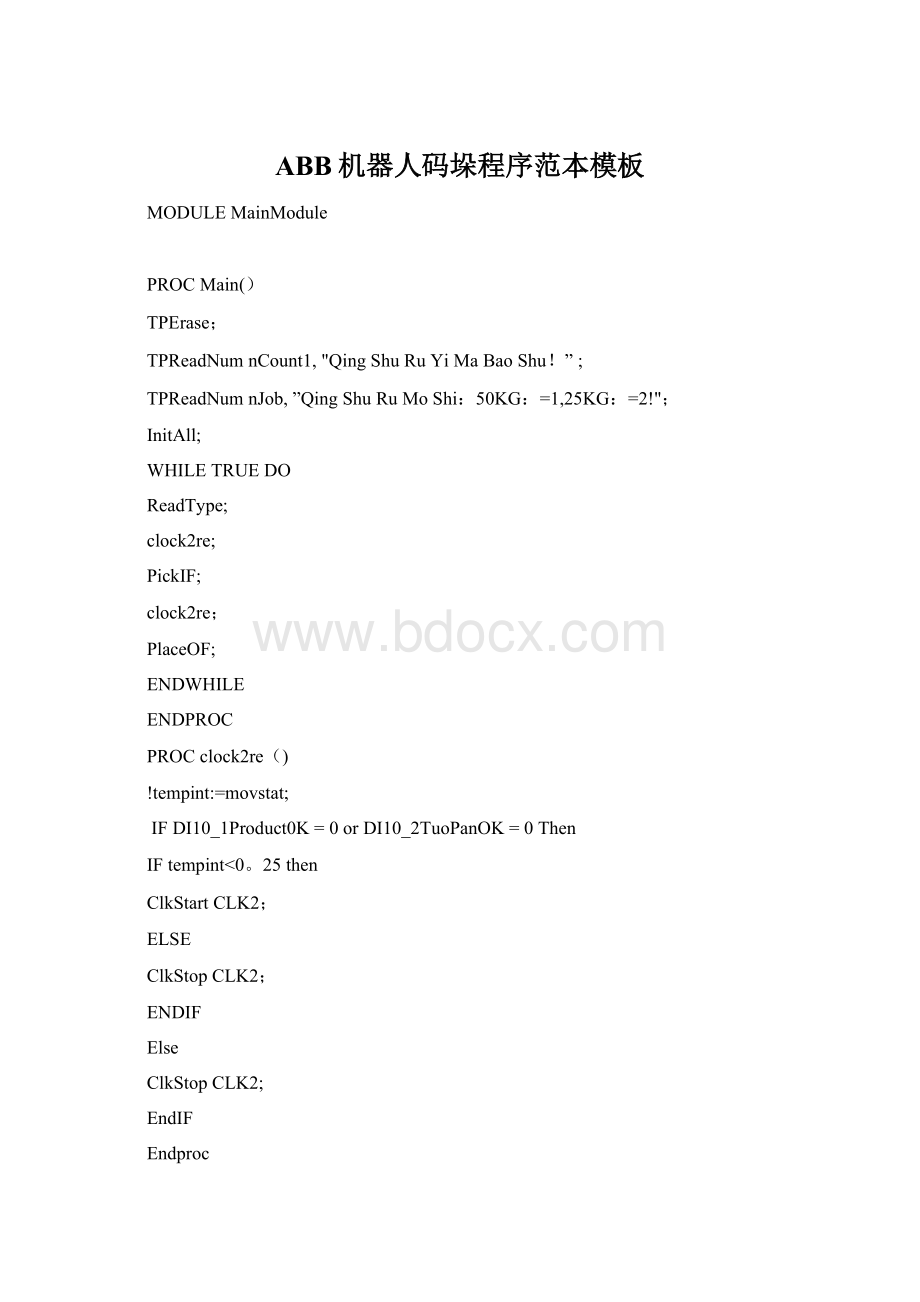
PROCInitAll()
MoveHome;
ResetDO10_1JiaZhua;
ResetDO10_2YaBan;
ResetDO10_3ZhuaOK;
ResetDO10_4MaDuoOK;
Waittime0.5;
bPickPart:
=FALSE;
ClkResetCLK1;
ClkStartCLK1;
ClkResetCLK2;
MoveLOffs(pPick,0,0,400),vFast,z10,tGripper\WObj:
=wobj0;
PROCPickIF()
IFbPickPart=FALSEANDnJob〈>
0ANDDI10_1Product0K=1THEN
CalculatePick;
MoveJOffs(pPick,0,0,400),vFast,z200,tGripper\WObj:
!
MoveLDOOffs(pPick,0,0,100),vFast,z20,tool0\WObj:
=wobj0,DO10_1JiaZhua,1;
MoveLpPick,vFast,fine,tGripper\WObj:
Close1;
GripLoadLoadFull;
Accset50,50;
HandshakeIF;
=TRUE;
ConfL\Off;
MoveJpAfterPick,vFast,z60,tGripper\WObj:
PROCPlaceOF()
IFDI10_2TuoPanOK=1ANDbPickPart=TRUETHEN
CalculatePlace;
ConfL\Off;
MoveLOffs(pOver,0,0,nOffsZ2),vFast,z200,tGripper;
IFbTag=truethen
Accset70,70;
MoveJpAbovePlace,vFast,z10,tGripper\WObj:
=wobj0;
else
Accset90,90;
MoveJpAbovePlace,vFast,z10,tGripper\WObj:
Endif
Accset100,100;
placefirstbox
MoveLOffs(pPlace1,nOffsX1,nOffsY1,nOffsZ1),vTurn,z10,tGripper\WObj:
MoveLpPlace1,vMiddle,fine,tGripper\WObj:
Open1;
MoveLOffs(pPlace1,0,0,nOffsZ1),vMiddle,z5,tGripper\WObj:
GripLoadLoadEmpty;
Accset100,100;
bPickPart:
IncrnCount1;
HandshakeOF;
MoveJpAbovePick,vFast,z200,tGripper\WObj:
MoveLOffs(pPick,0,0,400),vFast,z10,tGripper\WObj:
MoveJpHome,vFast,z200,tGripper;
PROCHandshakeIF()
IFnJob=1THEN
SetDO10_3ZhuaOK;
IFnJob=2THEN
PROCHandshakeOF()
IF(nCount1=40andnJob=1)or(nCount1=80andnJob=2)THEN
SetDO10_4MaDuoOK;
WaitDIDI10_2TuoPanOK,0;
SetDO\SDelay:
=0.5,DO10_4MaDuoOK,0;
nCount1:
=0;
ClkStopCLK1;
TPErase;
nCycleCount:
=ClkRead(CLK1);
Waitingtime:
=ClkRead(CLK2);
TPWrite"
Cycletime:
"
\Num:
=nCycleCount;
WaitingtimeinthisCycle:
”\Num:
=Waitingtime;
ClkResetCLK2;
ClkResetCLK1;
PROCMoveHome()
TempP1:
=CRobT(\Tool:
=tool0\WObj:
=wobj0);
TempP1。
trans.z:
=500;
MoveJTempP1,v1000,z20,tGripper;
MoveJpHome,v1000,z20,tGripper;
PROCReadType()
IFnPriority=1ANDDI10_1Product0K=1THEN
nJob:
=1;
IncrnPriority;
ELSEIFnPriority=2ANDDI10_1Product0K=1THEN
=2;
IncrnPriority;
IncrnPriority;
IFnPriority〉2nPriority:
=1;
PROCOpen1()
Waittime0。
0;
ResetDO10_1JiaZhua;
waittime0。
1;
WaittimenTimeGripper;
PROCClose1()
SetDO10_1JiaZhua;
0;
WaitDIDI10_4Zhua1End,1;
SetDO10_2YaBan;
Waittime0.0;
WaittimenTimeGripper;
WaitDIDI10_4Zhua1End,1;
WaitDIDI10_6Zhua2End,1;
PROCCalculatePick()
IFnJob=1THEN
pPick:
=pPick1;
ELSEIFnJob=2THEN
=pPick1;
ENDIF
pAbovePick:
=pPick;
pAfterPick:
Pattern80;
pAbovePick.trans。
z:
=pAfterPick。
trans。
z;
y:
trans.y—500;
pAfterPick.trans。
y:
trans.y—500;
PROCCalculatePlace()
nBagL:
=nBag50L;
nBagW:
=nBag50W;
nBagH:
=nBag50H;
nBagL:
=nBag25L;
=nBag25W;
=nBag25H;
Pattern100;
pAbovePlace:
=pPlace1;
pAfterPlace:
=pAbovePlace;
PROCPattern80()
bTag:
=FALSE;
TESTnCount1+1
CASE1:
pPlace1:
=pBase180;
pPlace1.trans。
x:
=pPlace1.trans。
x;
=pPlace1.trans.y;
pPlace1。
trans.z:
=pPlace1。
z;
nOffsX1:
=0;
nOffsY1:
nOffsZ1:
=500;
nOffsZ2:
=—500;
nLevel:
bTwice:
pAfterPick.trans.z:
=pPick.trans。
z+400;
=pPlace1;
pAbovePlace.trans.z:
=pPick。
bTag:
=True;
CASE2:
pPlace1:
=pBase0;
trans.x:
x;
pPlace1.trans.y:
y;
=pPlace1.trans.z;
nOffsX1:
nOffsY1:
nOffsZ1:
=nBagH*1。
2;
=—500;
bTwice:
z:
z+400;
pAbovePlace.trans.z:
CASE3:
=pBase90;
pPlace1.trans.x:
trans.x;
y+25;
=nBagH*1.2;
nOffsZ2:
=-500;
pAfterPick。
trans.z+400;
pAbovePlace:
pAbovePlace.trans。
trans.z+400;
CASE4:
=pBase90;
x:
x+2*nBagW;
pPlace1.trans.y:
pPlace1.trans.z:
=nBagH*1.2;
=-500;
nLevel:
CASE5:
=pPlace1.trans.x+nBagW;
pPlace1.trans.z:
=pPlace1.trans.z+20;
=nBagH*1.2;
Layer2
CASE6:
=pBase180;
trans.y+nBagL-5;
=pPlace1.trans.z+nBagH;
=nBagH*1。
2;
pAbovePlace。
CASE7:
=pBase0;
trans.x:
=pPlace1.trans.y+nBagL—5;
z+nBagH;
CASE8:
=pBase270;
=pPlace1.trans.z;
=pPick.trans.z+400;
CASE9:
pPlace1.trans.x:
=pPlace1.trans.x+2*nBagW—25;
=pPlace1.trans.y;
=nBagH*1.2;
CASE10:
x+nBagW;
trans.y;
Layer3
CASE11:
=pPlace1.trans.x;
trans.z+2*nBagH;
=True;
CASE12:
trans.y:
z+2*nBagH;
CASE13:
z+2*nBagH;
CASE14:
x+2*nBagW;
CASE15:
=pPlace1.trans.x+nBagW;
z+2*nBagH;
=pPick.trans.z+400;
layer4
CASE16:
y+nBagL-5;
trans.z+3*nBagH+80;
=—300;
CASE17:
y+nBagL—5;
z+3*nBagH;
=-300;
CASE18:
trans.z+2*nBagH;
=-300;
=


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- ABB 机器人 码垛 程序 范本 模板
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
消防设计技术审查的要点Word文档格式.docx
-
第三章 习题课 带电粒子在磁场或复合场中的运动Word格式.docx
-
湖南岳阳中考英语模拟卷含答案Word文档格式.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
Windows7旗舰版安装教程Word下载.docx
-
1000字演讲稿范文4篇Word格式.docx
-
XX小学教务管理制度文档格式.docx
-
Action Research研究报告撰写指导Word文件下载.docx
-
北师大版八年级数学下册计算题天天练 59Word文档下载推荐.docx
-
Drafting CISG Contracts and Documents and Compliance Tips for TradersWord文件下载.docx
-
必修下知识点总结笔记2《齐桓晋文之事》Word文档下载推荐.docx
-
C#创建不规则窗体窗口的几种方式Word文件下载.docx
-
K9+430K9+595清淤首件施工技术方案Word格式.docx
-
《某置业地产深圳区域专业序列晋升管理制度》21页Word下载.docx
-
CPA 注册会计师 会计 分章节知识点详解第十一章 借款费用Word下载.docx
-
FPGA复习题Word下载.docx
-
1生活用电Word格式文档下载.docx
-
Mn液化气干燥器的焊接工艺制定焊接工艺说明书co气体保护焊Word格式文档下载.docx
-
TheLongTail长尾理论完整中译版文档格式.docx
-
《社区志愿服务管理规范》样本Word格式文档下载.docx
-
mysql主从备份6Word下载.docx
-
Lucene教程详解Word格式文档下载.docx
-
Excel公式应用常见错误及处理Word文档下载推荐.docx
