 自动控制原理.docx
自动控制原理.docx
- 文档编号:24227952
- 上传时间:2023-05-25
- 格式:DOCX
- 页数:3
- 大小:63.43KB
自动控制原理.docx
《自动控制原理.docx》由会员分享,可在线阅读,更多相关《自动控制原理.docx(3页珍藏版)》请在冰豆网上搜索。
自动控制原理
《自动控制原理》复习资料1
一、填空题
1、线性系统的对数幅频特性,纵坐标取值为 ,横坐标 。
2、奈奎斯特稳定判据中,Z=P+N,其中P是指,Z是指,N指。
3、在二阶系统的单位阶跃响应图中,
定义为。
是。
4、PI控制规律的时域表达式是。
PID控制规律的传递函数表达式是。
5、设系统的开环传递函数为
,则其开环幅频特性为,相频特性为。
二、
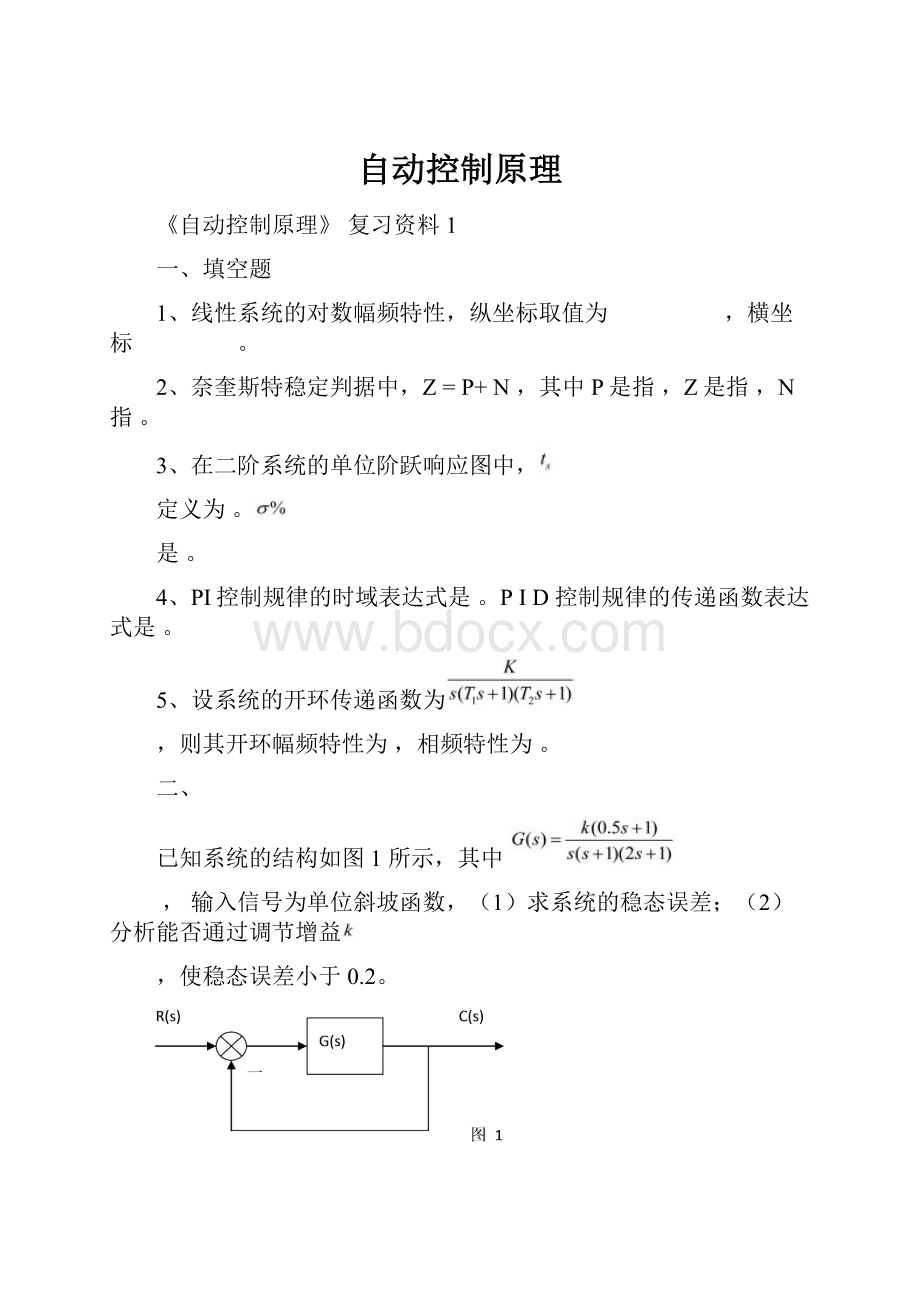
已知系统的结构如图1所示,其中
,输入信号为单位斜坡函数,
(1)求系统的稳态误差;
(2)分析能否通过调节增益
,使稳态误差小于0.2。
三、方块图的化简
四、已知最小相位系统的对数幅频特性如图3所示。
试求系统的开环传递函数。
答案
一、填空题
1、
(或:
);
(或:
按对数分度)
2、开环传函中具有正实部的极点的个数,(或:
右半S平面的开环极点个数);
闭环传函中具有正实部的极点的个数(或:
右半S平面的闭环极点个数,不稳定的根的个数);奈氏曲线顺时针方向包围(-1,j0)整圈数。
3、系统响应到达并保持在终值
误差内所需的最短时间(或:
调整时间,调节时间);响应的最大偏移量
与终值
的差与
的比的百分数。
(或:
,超调)
4、
(或:
) ;
(或:
)
5、
;
二、解:
Ⅰ型系统在跟踪单位斜坡输入信号时,稳态误差为


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动控制 原理
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
该用户的其他资源 更多>>
 《包身工》教案设计精选文档.docx
《包身工》教案设计精选文档.docx
-
《赤壁赋》导学案.docx
-
《不是每个女生都有好几个后备军而是每个男生都会排好几个队》.docx
-
《春》学案1 1.docx
-
《基于NET的商品销售管理系统》开题报告.docx
-
《结构设计原理》复习资料1.docx
-
《牵引供电系统》习题.docx
-
《社会的构成》读书笔记.docx
-
《孙中山破陋习》教学设计三.docx
-
《微生物学教程周德庆》各章复习重点.docx
-
《中国文化》英语教程复习题及答案.docx
-
00安徽工贸职业技术学院毕业设计论文撰写规范试行1.docx
-
1承诺办理时限是什么概念实际办理的时间能不能比承诺办理时限.docx
-
1中小型压缩机安装施工工艺标准.docx
-
5第五章长期股权投资 单元测试.docx
-
6一株紫丁香.docx
-
#对完善我国监护法律制度立法的思考.docx
-
《 民间治病药方》.docx
-
《PremiereProCC影视编辑标准教程微课版》配套教学教学案.docx
-
《财务会计》相关复习题英文版.docx
-
《单片机原理及应用》黄友锐主编课后习题答案副本.docx
-
#2机组大修建议汇总.docx
-
《地心历险记》观后感600字600字读后感.docx
-
《供应链管理》习题和标准答案.docx
-
《黄山奇石》教学反思15篇.docx
-
《建筑施工技术》形成性考核册答案附题目.docx
-
《描绘小灯泡的伏安特性曲线》试题精选.docx
-
《人大监督法》讲稿子.docx
-
《阿西莫夫短文两篇》教案.docx
-
《地理标志产品保护工作细则》.docx
-
《工程质量检验标准》.docx
-
《化学反应的利用》鲁科版必修2.docx
猜你喜欢
-
国家农民体育健身工程项目可行性研究报告.docx
-
建筑安装工程招标书.docx
-
国内私人股权投资基金市场研究分析报告.docx
-
哈尔滨样本解读.docx
-
鉴赏辽金元陶瓷品.docx
-
海事局XX年工作计划.docx
-
江苏省南京学大教育专修学校届高三月考化学试题.docx
-
合同法案例集及答案解析.docx
-
教科版六年级上册科学教案.docx
-
合同协议范本国际融资租赁合同范本.docx
-
教学铁厂中学构建高效课堂实施方案0407.docx
-
河北省辛集中学学年度高二上学期期中考试地理试题word.docx
-
教育学习文章乡镇司法所长在干部作风整顿建设活动讨论会上的发言.docx
-
河南省六市届高三第一次联考试题.docx
-
解决国有企业劳动争议存在的问题及对策.docx
-
湖南省岳阳县第三中学学年高一上学期期中英语试题含答案.docx
-
届福州市高三下学期英语毕业班适应性测试试题 无答案.docx
-
化妆师初级题目模板.docx
-
经济管理学院重点.docx
关于本文
相关资源
更多
