 智能吸尘器的开发及设计.docx
智能吸尘器的开发及设计.docx
- 文档编号:24496467
- 上传时间:2023-05-28
- 格式:DOCX
- 页数:6
- 大小:64.51KB
智能吸尘器的开发及设计.docx
《智能吸尘器的开发及设计.docx》由会员分享,可在线阅读,更多相关《智能吸尘器的开发及设计.docx(6页珍藏版)》请在冰豆网上搜索。
智能吸尘器的开发及设计
智能吸尘器的开发及设计
摘要:
介绍一种能在无人情形下自主工作,并具有自动避障等功能的新型智能吸尘器的开发及设计,它自带电源,由单片机操纵。
关键词:
超声波避障功能MC51单片机步进电机智能吸尘器 随着社会的进步和进展,人们的学习、工作愈来愈忙碌,于是如何更大程度地将人们从烦琐的日常事物中摆脱出来,就成了新一代家电所追求的目标。
而智能化正是这一目标的集中表现。
本文介绍的智能吸尘器初步实现了无人情形下的自主工作方式,专门大程度地提高了产品的自动化水平。
1整体原理
该智能吸尘器利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对障碍物进行判定;通过以单片机为核心的操纵器实现对超声发射和接收的选通操纵,并在处置返回脉冲信号的基础上加以判定,选定相应的操纵策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现避障功能。
与此同时,由其自身携带的小型吸尘部件,对通过的地面进行必要的吸尘打扫。
2功能实能
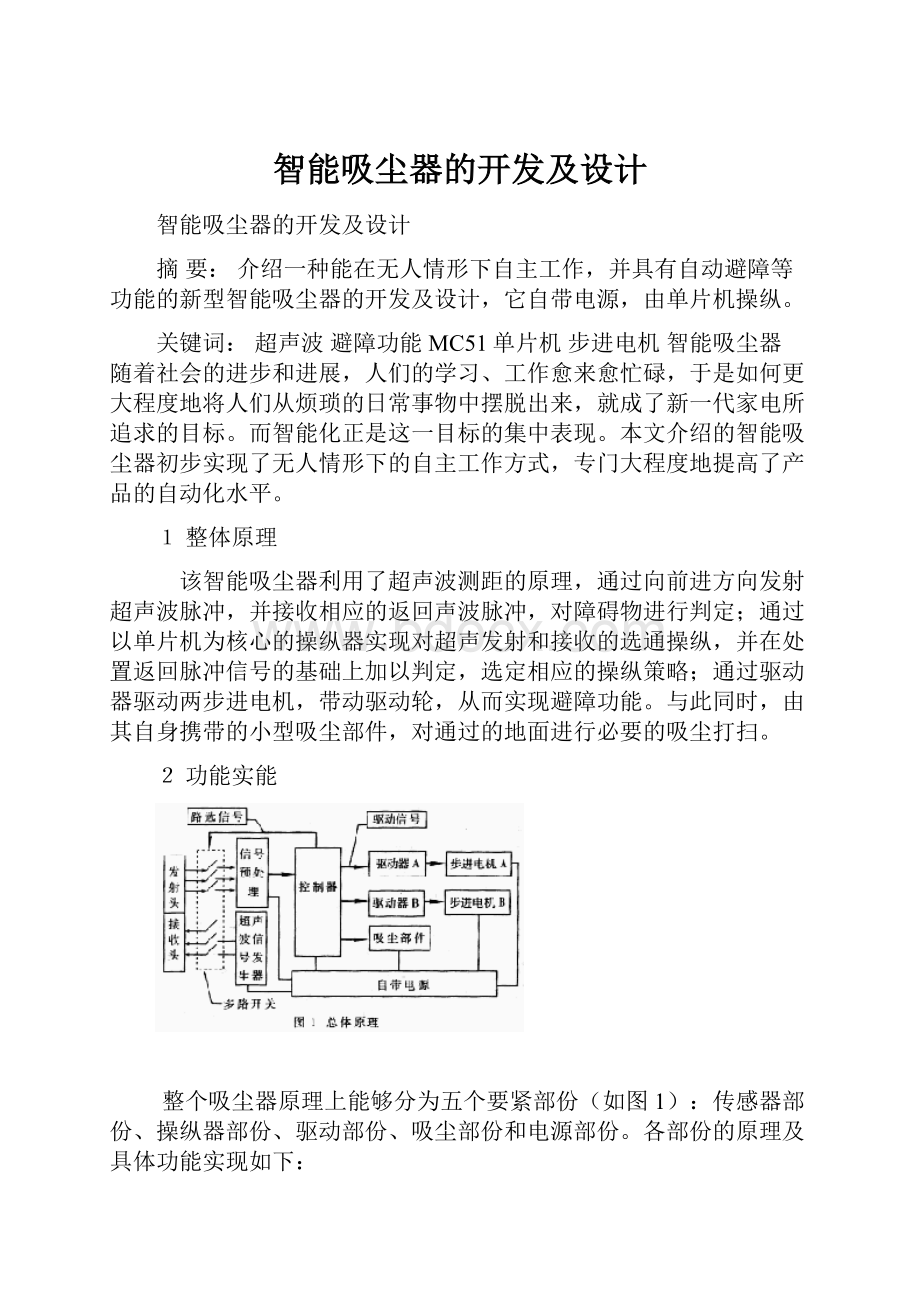
整个吸尘器原理上能够分为五个要紧部份(如图1):
传感器部份、操纵器部份、驱动部份、吸尘部份和电源部份。
各部份的原理及具体功能实现如下:
2.1传感器部份
2.1.1超声波测距原理
超声波是一种一定频率范围的声波。
它具有在同种媒质中以恒定速率传播的特性,而在不同媒质的界面处,会产生反射现象。
利用这一特性,就可以根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用。
其具体的计算公式如下:
s=v×t/2
其中,s为障碍物与吸尘器之间的距离;t为发射到接收经历的时间;v为声波在空气中传播的速度。
由于v的值受温度的影响会波动,因此,在实际的应用中可以用以下公式来加以补偿,其中T表示空气的绝对温度,m/s为速度单位。
在智能吸尘器中,避障功能的实现正是利用了这一超声波测距的原理。
它的传感器部份由三对(每对包括一个发射探头和一个接收探头)共六个超声波传感头组成。
由单独的振荡电路产生频率固定为40kHz,幅值为5V的超声波信号。
在操纵器送来的路选信号(如图1)的作用下,40kHz的振荡信号被加在超声发射探头的两头,从而产生超声信号向外发射;该信号碰到障碍物时,产生反射波,当这一反射波被接收探头接收后,依照前述测距的原理,就能够够精准地判定障碍物的远近;同时,依照信号的幅值大小,也能够初步确信障碍物的大小。
2.1.2探测范围的确信
由于每一个超声波探头都有一定的指向性(即发射或接受的空间范围),所以在测量时必然存在盲区(如图2)。
因此,三对传感器必然以一定的尺寸分布在吸尘器的前端,从而使传感器测量的范围包含整个吸尘器所必须经过的空间,同时又避免探测死角(既使盲区落在须测量的范围之外)。
2.1.3避免干扰
由于三对超声波传感探头之间的安装距离比较近,因此存在彼此干扰的问题。
为了解决这一问题,在设计中引进了循环扫描的方式。
既循环地对每组探头施加发射和接收,当一组工作时,其余两组停止。
循环周期由路选信号来操纵,只有15ms(即在15ms的时刻里完成一次对三组探头的扫描),因此在实际应用中很靠得住。
2.2操纵部份
控制部分的核心是MC51单片机,它主要完成三个部分的任务:
· 向传感器部分(三路)分别送路选信号:
当路选信号是高电频时,该路导通;反之,就截止。
这样,通过路选信号,就可以完成三路信号的顺序扫描以及对发射和接收的计时功能。
· 作为操纵器的核心,它要依照接收的信号(左、中、右三路)的幅值,和从发射到接收的时刻距离,计算并判定障碍物的相对位置,大致大小。
在此基础上,依照事前设定的规那么,选定相应的避障方法(前进、左转、右转、后退、调头)。
· 最后,在确定了避障措施后,要向步进电机的控制器输出相应的控制脉冲,以具体实现避障。
2.3驱动部份
驱动部份是由两个四相步进电机和相应的驱动机构组成的。
步进电机带动两驱动轮(后轮),从而推动吸尘器运动。
前轮再也不采纳传统的双轮结构,而采纳了应用超级普遍的平面轴承,这既减小了结构复杂度,又提高了转弯的灵活性(如图3)。
通过改变作用于步进电机的脉冲信号的频率,能够对步进电机实现较高精度的调速。
同时在对两电机别离施加相同或不同脉冲信号时,通过差速方式,能够方便的实现吸尘器前进、左转、右转、后退、调头等功能。
这一设计的最大优势是吸尘器能够在任意半径下,以任意速度实现转弯,乃至当两后轮彼此反向运动时,实现零转弯半径(即绕轴中点原地施转)。
同时转弯的速度可通过改变单片机的程序来调剂。
由于智能吸尘器是边行走边工作的,所以要求速度很低,一般要求5m/min左右,而步进电机为幸免低速爬行,其转速又不能太低,为此,在电机轴与轮轴之间采纳了一级齿轮传动,设计传动比为3.7。
设电机的转速为n(转/秒),驱动轮的半径为r(米),那么驱动轮的前进速度为:
式中,vk,k=1,2,代表左右驱动轮的线速度;i——齿轮传动比。
通过调剂n的大小和正反,能够实现vk的持续转变,从而实现任意半径的转弯。
电机转向与吸尘器的运动方式的关系如表1。
2.4吸尘器部份
吸尘功能是由封闭在壳体中的小型吸尘器完成的。
包括气泵、吸室、吸道和吸嘴。
在吸尘器爬行的过程中,通过底盘上开的吸嘴将扫过的地面上的灰尘吸入吸室。
2.5电源部份
由于智能吸尘器是以自主方式工作的,因而所用的电源不是一般拖线方式,而是采用随身携带的蓄电池(3A/20hour)。
如此不但可实现无人操纵,而且工作时较灵活。
一次充电能够持续
工作几个小时。
3部份电路说明
3.1超声信号发生
40kHz的超声波信号是由555芯片构成的多谐振荡电路产生的(如图4)。
由R1、R11、R12和C1构成外围的充放电电路;当参数漂移时,通过调节R12的阻值,可微调信号的中心频率。
3.2步进电机驱动
由控制器输出的驱动脉冲信号经7404反向后,驱动功率三极管从而带动步进电机。
图5列出了一相的驱动电路。
由于有两个步进电机,每一电机按四相八拍制工作,因而共有八组驱动电路。
3.3控制器
控制器是由MC51单片机构成的。
与前述控制器所完成的三相主要任务相对应的硬件结构分别介绍如下:
路选信号由单片机的P1口输出,占用了~共6脚。
它们直接控制6个模拟开关;步进电机的驱动信号由P2口输出,~控制步进电机A,~控制步进电机B;超声返回信号经放大、滤波、检波后,引入单片机的中断口,激励相应的中断处理程序。
4系统性能及特点
从以上介绍能够看出,新一代的智能吸尘器通过将MC51单片微机与自身相结合,极大地提高了产品的可塑性,适应于高层次的开发与应用。
它在完成超声避障的基础上,初步实现了无人干与下的自主工作方式,同时由于特殊的驱动结构的设计,实现零半径的转弯,因此具有智能化、高效性、轻便、灵巧等特点,是较新的进展方向。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 智能 吸尘器 开发 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《包身工》教案设计精选文档.docx
《包身工》教案设计精选文档.docx
-
《赤壁赋》导学案.docx
-
《不是每个女生都有好几个后备军而是每个男生都会排好几个队》.docx
-
《春》学案1 1.docx
-
《基于NET的商品销售管理系统》开题报告.docx
-
《结构设计原理》复习资料1.docx
-
《牵引供电系统》习题.docx
-
《社会的构成》读书笔记.docx
-
《孙中山破陋习》教学设计三.docx
-
《微生物学教程周德庆》各章复习重点.docx
-
《中国文化》英语教程复习题及答案.docx
-
00安徽工贸职业技术学院毕业设计论文撰写规范试行1.docx
-
1承诺办理时限是什么概念实际办理的时间能不能比承诺办理时限.docx
-
1中小型压缩机安装施工工艺标准.docx
-
5第五章长期股权投资 单元测试.docx
-
6一株紫丁香.docx
-
#对完善我国监护法律制度立法的思考.docx
-
《 民间治病药方》.docx
-
《PremiereProCC影视编辑标准教程微课版》配套教学教学案.docx
-
《财务会计》相关复习题英文版.docx
-
《单片机原理及应用》黄友锐主编课后习题答案副本.docx
-
#2机组大修建议汇总.docx
-
《地心历险记》观后感600字600字读后感.docx
-
《供应链管理》习题和标准答案.docx
-
《黄山奇石》教学反思15篇.docx
-
《建筑施工技术》形成性考核册答案附题目.docx
-
《描绘小灯泡的伏安特性曲线》试题精选.docx
-
《人大监督法》讲稿子.docx
-
《阿西莫夫短文两篇》教案.docx
-
《地理标志产品保护工作细则》.docx
-
《工程质量检验标准》.docx
-
《化学反应的利用》鲁科版必修2.docx
-
什么是记忆宫殿记忆法.docx
-
是否很惊讶讲不出说话.docx
-
生产经营单位生产安全事故应急预案.docx
-
生理学练习.docx
-
生物化学课程实验指导书.docx
-
输电线路工程项目划分表.docx
-
暑期社会实践活动总结推荐4篇.docx
-
数据结构实验折半查找实验报告.docx
-
数据挖掘论文论文.docx
-
施工管理bdf空心箱楼板施工方案分析.docx
-
数学小升初测试题含答案.docx
-
施工现场重大危险源的控制措施方案.docx
-
双向板的弹性和塑性计算.docx
-
水电安装工程施工规范最新齐全版doc.docx
-
石脑油燃料油消费税退免税工作指南.docx
-
实习半年工作总结范文范文精选.docx
-
彩钢板屋墙面板施工方法secret.docx
-
餐饮店容易出现的 个问题的处理办法.docx
-
毕业同学聚会筹委会的感谢信.docx
