 机器人期末测试含部分答案.docx
机器人期末测试含部分答案.docx
- 文档编号:26022907
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:11
- 大小:348.40KB
机器人期末测试含部分答案.docx
《机器人期末测试含部分答案.docx》由会员分享,可在线阅读,更多相关《机器人期末测试含部分答案.docx(11页珍藏版)》请在冰豆网上搜索。
机器人期末测试含部分答案
工业机器人期末测试
一、机器人运动学
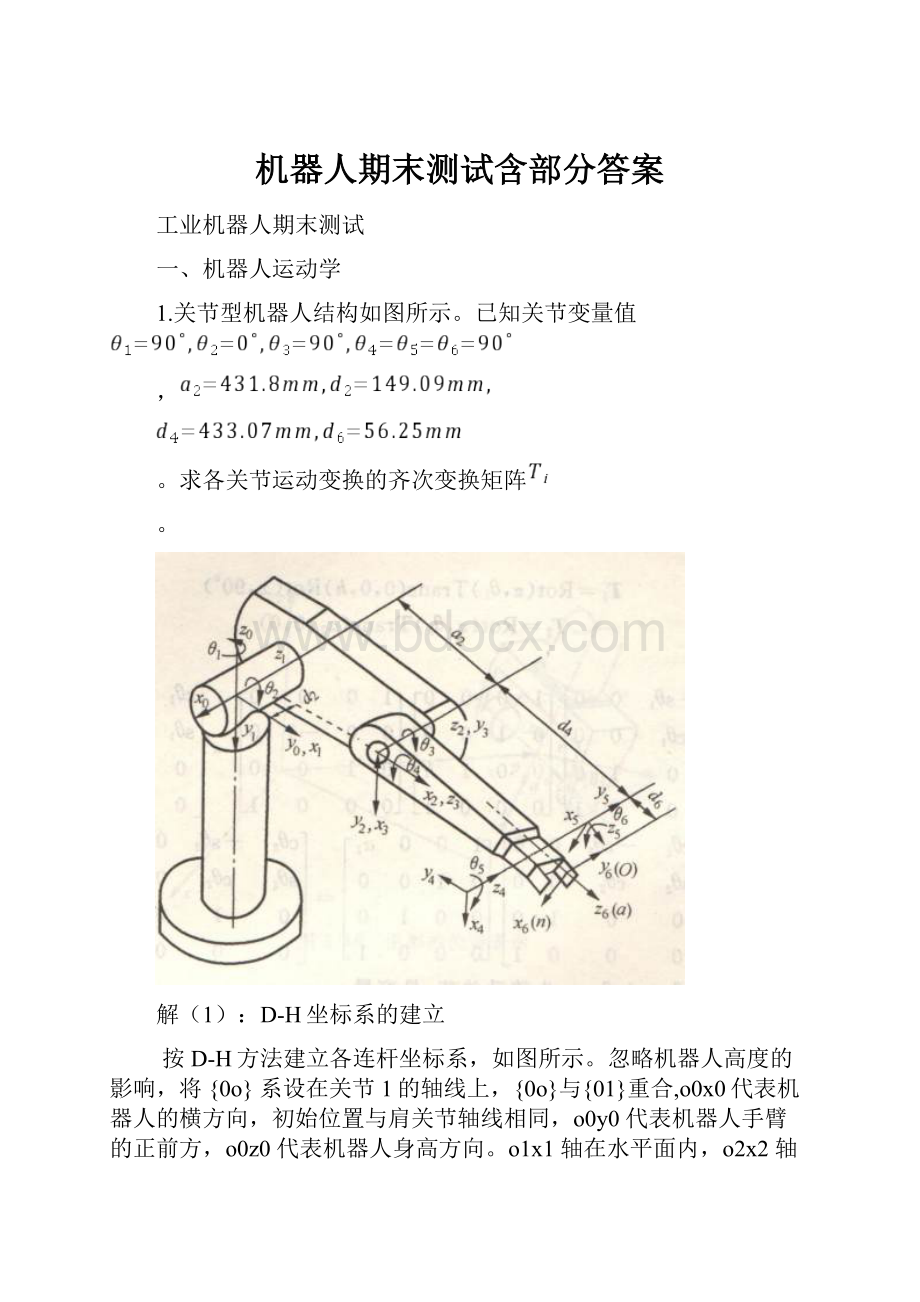
1.关节型机器人结构如图所示。
已知关节变量值
,
。
求各关节运动变换的齐次变换矩阵
。
解
(1):
D-H坐标系的建立
按D-H方法建立各连杆坐标系,如图所示。
忽略机器人高度的影响,将{0o}系设在关节1的轴线上,{0o}与{01}重合,o0x0代表机器人的横方向,初始位置与肩关节轴线相同,o0y0代表机器人手臂的正前方,o0z0代表机器人身高方向。
o1x1轴在水平面内,o2x2轴沿大臂轴线方向,o3x3轴与小臂轴线垂直,o4x4∥o5x5∥o6x6。
坐标原点o2、o3与o4、o5重合。
o6x6y6z6为终端坐标系,该坐标系考虑了工具长度d6。
(2)确定各连杆的D-H参数
(3)求两杆之间的位姿矩阵Ti
2.如图二自由度平面机械手,已知手部中心坐标值为
。
求该机械手运动方程的逆解
及
。
二、机器人动力学
1.如图二自由度平面机械手,已知杆长
,相关参数如下表所示。
求表中两种情况下的关节瞬时速度
和
。
2.已知二自由度平面机械手的雅可比矩阵为
。
若忽略重力,当手部端点力
时,求与此力相应的关节力矩。
解:
因为雅可比矩阵为
三、机器人的智能控制
简述机器人人工神经网络控制技术的原理及方法。
答:
基本原理:
神经元是以生物神经系统的神经细胞为基础的生物模型,在人们对生物神经系统进行研究以探讨人工智能的机制时,把神经元数学化,从而产生神经元数学模型。
机器人的神经网络动力学控制方法中,典型的是计算力矩控制和分解运动加速度控制,前者在关节空间闭环,后者在直角坐标空间闭环. 在基于模型计算力矩控制结构中,关键是逆运动学计算,为实现实时计算和避免参数不确定性,可通过神经网络来实现输入输出的非线性关系. 对多自由度的机器人手臂,输入参数多,学习时间长,为了减少训练数据样本的个数,可将整个系统分解为多个子系统,分别对每个子系统进行学习,这样就会减少网络的训练时间,可实现实时控制.
四、机器人的控制基础
交流伺服电动机有哪几种调速方式,请分别说明其原理。
答:
交流电动机的调速方法很多,有调压调速、斩波调速、转子串电阻调速、串级调速、滑差调速、变频调速等。
但是从本质上讲,由异步电动机的转速公式可知,交流电动机的调速方法实际上只有两类;
1.在电动机旋转磁场的同步速度恒定的情况下调节转差率,属于耗能的低效调速方法。
原理是,在电源电压一定时,从电源输入的功率就是一定的,通过电枢中串电阻调速,就是在电阻上产生一部分损耗,使电动机的功率减少,转速降低。
2.调节电动机旋转磁场的同步速度,属于高效的调速方法。
原理是,改变电动机的输入电压,随着电压的降低,输入功率降低,输出功率当然也下降,于是转速下降,这里不断增加损耗,所以是一种高效的调速方法。
3.
4.
5.
机器人科普知识题
判断题:
1.地标的作用是什么?
A.观赏用B.提供机器人辅助信息
2.机器人比赛需要人控制吗?
A.需要B.不需要
3.机器人身上的灯有什么用处?
A.装饰用B.控制及装饰
4.今年举行的江苏省科普机器人大赛是第几届?
A.21B.6
5.索尼生产的机器狗的名字叫做什么?
A.爱宝B.阿西莫
6.RoboCup是什么意思?
A.机器人足球世界杯B.机器人足球表演赛
7.机器人一般采用什么电池作为能源?
A.锂电池B.燃料电池
8.RoboCup的目标是什么?
A.战胜人类足球世界杯冠军队伍B.开发具有人类智能的机器人
9.四足机器人身上的耳朵和尾巴有什么用处?
A.装饰和美观B.充当传递信号使用的天线
10.目前的机器人足球比赛中,机器人怎么得到球的信息?
A.通过机器人配备的摄像机B.通过机器人配备的无线红外测量仪
11.机器人能理解竞赛场地信息的含义吗?
A.能B.不能
12.机器人之间能通信吗?
A.能B.不能
13.目前普及型机器人之间的通信方式是什么
A.通过无线网络B.通过蓝牙、红外等无线手段
14.机器人一定会有“手”
A.对B.错
15.机器人一定会有“脑”
A.对B.错
16.只有人型的机器人才能被叫做“机器人”
A.对B.错
17.齿轮除了可以改变扭矩外还可以改变转动方向
A.对B.错
18.制作理想的机器人是一个循环反复的过程,通常分为几个步骤,分别是()。
A:
设计搭建,编程,程序输入,调试运行 B:
搭建,编程
19.触觉传感器一般是应变片、压阻元件、导电橡胶、微动开关等,它能感应()。
A:
分布、接触力、滑动状态 B:
图像、声音
20.听觉传感器可将声音、超声等转换成电信号,它可能是()。
A:
麦克风、超声波传感器 B:
形状、机械动作
21.机器人是一种在生产中能灵活完成特定操作,并有多种功能的机器,用它来代替()。
A:
人的脑力劳动 B:
人的体力劳动
22.机器人为人类承担了大量的艰苦、繁重、危险的工作和单调、重复的劳动,那是因为()。
A:
把人类从这些环境中解放出来,使人类可以从事只有人类才能做的创造性劳动
B:
人类做不好这些事
23.有的机器人有眼睛会看,靠的是()。
A:
视觉传感器如摄像头、超声波、雷达等B:
照相机镜头
24.有的机器人会听会说,靠的是()。
A:
由语音识别系统来听(一般采用话筒),由语音合成系统来说。
由这些声音传感器配以相应的软件来完成
B:
人为操纵
25.机器人最常采用的基本传感器有()。
A:
视觉传感器、力觉传感器、触觉传感器、位移传感器、速度传感器、加速度传感器等
B:
照相机、温度计
26.机器人的检测系统是指()
A:
机器人身上的各种传感器B:
机器人的外壳
27.机器人的执行(运动)部分主要指()
A:
机器人用于完成任务的机体装置 B:
机器人手臂
28.机器人的动力驱动主要有()
A:
电动、气动、液压驱动B:
靠人力驱动
29.有精度要求的机器人的控制系统应是()
A:
闭环控制系统 B:
开环控制系统
30.机器人的控制系统包括()
A:
控制电脑和伺服控制器B:
工作人员
选择题:
1、在机器人系统中,我们经常会用到一些传感器,请问下列传感器中用来测量光线强弱的是()。
A、光敏电阻B、热敏电阻C、接触开关D、气敏传感器
2、在机器人灭火项目中,用来探测火源的传感器是()。
A、接触开关B、声音传感器C、湿度传感器D、光传感器
3、机器人的听觉是来自()
A、接触开关B、电子指南针C、光电传感器D、麦克风
4、请问电机配合减速齿轮组的好处在于()。
A、加快运动速度B、增加扭矩C、减小扭矩D、没作用
5、电子指南针模块也称电子罗盘,它在机器人足球赛中的作用是()
A、增加重量B、判断球门方向C、装饰D、没作用
6、Robot一词的来源是()
A、美国B、日本C、捷克D、英国
7、机器人的发展经历了哪几个阶段?
A、电路控制、程序控制、智能控制B、程序控制、智能控制、电路控制
C、程序控制、仍是程序控制、智能控制D、电路控制、程序控制、仍是程序控制
8、机器人长了哪些"器官"?
A、控制系统、硬盘储存、眼睛
B、感应器、程序操作系统、腿
C、智能控制、硬盘储存、手臂
D、手、臂动力控制系统、计算机装置和储存装置、传感器
9、军队里有机器人吗?
A、有,比如说地面军用机器人B、没有C、正在研制中D、军队里禁止有机器人
10、机器人可以改造人类吗?
A、可能造福于人类,也可能伤害到人类
B、只能伤害人类
C、机器人应当造福于人类而不伤害人类
D、机器人队伍在不断的壮大,对人类的威胁日益增加


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 期末 测试 部分 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《初级会计实务》试题题库大全及答案详解.docx
《初级会计实务》试题题库大全及答案详解.docx
-
《管理学》习题教材15章.docx
-
《教育学》读后感范文精选6篇.docx
-
《林教头风雪山神庙》练习题.docx
-
《企业文化》期末复习应考指南央专.docx
-
《数据结构》知识题汇编09第九章排序试题.docx
-
《偷影子的人》读后感集合15篇.docx
-
《幼儿园工作规程》.docx
-
《残疾人证》管理办法.docx
-
《故事》教学反思.docx
-
《Java语言学习知识程序设计》复习资料汇编.docx
-
《短文两篇》课堂实录.docx
-
《基于MATLAB的信号与系统实验指导》编程练习试题doc.docx
-
《昆虫记》好词好句大全.docx
-
《木棉树》阅读答案.docx
-
《区间信号自动控制》练习册答案.docx
-
《山东省中小学教师职称评审表》高级教师一级教师二级教师专用A4纸正反面打印按页码装订许知忠.docx
-
《安娜卡列尼娜》读后感.docx
-
《繁星春水》读后感15篇.docx
-
《苏州市市级示范物业管理项目服务质量评价标准》 doc.docx
-
《采薇》教案.docx
-
《假如给我三天光明》阅读测试题有答案.docx
-
《小学数学教师》读书笔记精选多篇.docx
-
《给幼儿教师的一把钥匙》读书笔记.docx
-
《劳动法》教案设计.docx
-
《综合基础知识》必看考点《刑法》含答案.docx
-
《建筑构造》考试试题及答案精华.docx
-
3套打包北师大版四年级下册英语期末单元测试题解析版.docx
-
《雷锋的微笑》观后感.docx
-
《女人故事》电视栏目策划方案1.docx
-
7万多车对比分解.docx
-
《调皮的日子》题库.docx
-
半年经济形势分析会上的讲话.docx
-
城市规划原理25模拟题.docx
-
保护黄河倡议书.docx
-
初级电焊工理论考试题及答案.docx
-
北京建筑业联合会团体标准管理试行办法.docx
-
初中一年级上册生物知识点总结.docx
-
传递爱心作文20篇.docx
-
北京市届高三统一测试一模英语.docx
-
大班上学期班务工作总结.docx
-
北师版七年级下册《三角形》拔高题.docx
-
大纲.docx
-
必修9 unit 2 单词.docx
-
毕业论文设计周志+终1.docx
-
大学本科毕业论文格式范文模板下载.docx
-
标志标线的做法.docx
-
档案中级职称专业考试参考试题.docx
-
标准宴席单已标注.docx
-
表彰大会领导讲话稿精选三篇.docx
-
病历书写规范细则版.docx
