 实验1 位移测量实验.docx
实验1 位移测量实验.docx
- 文档编号:26325253
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:14
- 大小:2.06MB
实验1 位移测量实验.docx
《实验1 位移测量实验.docx》由会员分享,可在线阅读,更多相关《实验1 位移测量实验.docx(14页珍藏版)》请在冰豆网上搜索。
实验1位移测量实验
实验三电涡流传感器位移测量实验
一、实验目的:
了解电涡流传感器测量位移的工作原理和特性。
二、基本原理:
电涡流式传感器是一种建立在涡流效应原理上的传感器。
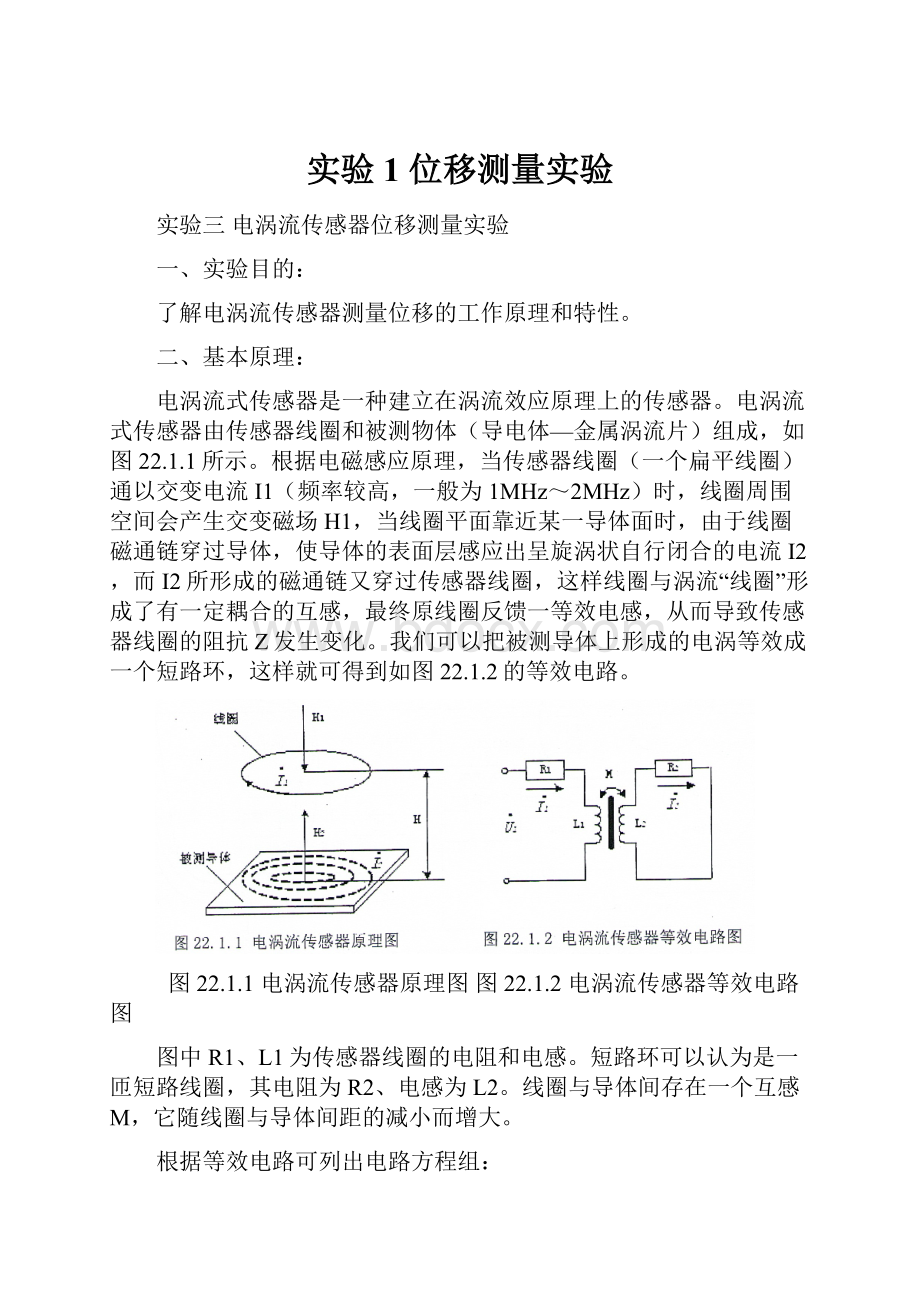
电涡流式传感器由传感器线圈和被测物体(导电体—金属涡流片)组成,如图22.1.1所示。
根据电磁感应原理,当传感器线圈(一个扁平线圈)通以交变电流I1(频率较高,一般为1MHz~2MHz)时,线圈周围空间会产生交变磁场H1,当线圈平面靠近某一导体面时,由于线圈磁通链穿过导体,使导体的表面层感应出呈旋涡状自行闭合的电流I2,而I2所形成的磁通链又穿过传感器线圈,这样线圈与涡流“线圈”形成了有一定耦合的互感,最终原线圈反馈一等效电感,从而导致传感器线圈的阻抗Z发生变化。
我们可以把被测导体上形成的电涡等效成一个短路环,这样就可得到如图22.1.2的等效电路。
图22.1.1电涡流传感器原理图图22.1.2电涡流传感器等效电路图
图中R1、L1为传感器线圈的电阻和电感。
短路环可以认为是一匝短路线圈,其电阻为R2、电感为L2。
线圈与导体间存在一个互感M,它随线圈与导体间距的减小而增大。
根据等效电路可列出电路方程组:
通过解方程组,可得I1、I2。
因此传感器线圈的复阻抗为:
线圈的等效电感为:
线圈的等效Q值为:
式中:
Q0—无涡流影响下线圈的Q值,Q0=ωL1/R1;
Z22—产生电涡流部分的阻抗,Z22=R22+ω2L22。
由式Z、L和式Q可以看出,线圈与金属导体系统的阻抗Z、电感L和品质因数Q值都是该系统互感系数平方的函数,而从麦克斯韦互感系数的基本公式出发,可得互感系数是线圈与金属导体间距离x(H)的非线性函数。
因此Z、L、Q均是x的非线性函数。
虽然它整个函数是一非线性的,其函数特征为"S"型曲线,但可以选取它近似为线性的一段。
其实Z、L、Q的变化与导体的电导率、磁导率、几何形状、线圈的几何参数、激励电流频率以及线圈到被测导体间的距离有关。
如果控制上述参数中的一个参数改变,而其余参数不变,则阻抗就成为这个变化参数的单值函数。
当电涡流线圈、金属涡流片以及激励源确定后,并保持环境温度不变,则线圈Z、L、Q的变化只与距离x有关。
于此,通过传感器的调理电路(前置器)处理,将线圈Z、L、Q的变化转化成电压或电流的变化输出。
输出信号的大小随探头到被测体表面之间的间距而变化。
电涡流传感器就是根据这一原理实现对金属物体的位移、振动等参数的测量。
为实现电涡流位移测量,必须有一个专用的测量电路。
这一测量电路(称之为前置器,也称电涡流变换器)应包括具有一定频率的稳定的震荡器和一个检波电路等。
电涡流传感器位移测量实验框图如图22-2所示:
根据电涡流传感器的基本原理,将传感器与被测体间的距离变换为传感器的Q值、等效阻抗Z和等效电感L三个参数,用相应的测量电路(前置器)来测量。
本实验的涡流变换器为变频调幅式测量电路,电路原理如图22—3所示。
电路组成:
(1)Q1、C1、C2、C3组成电容三点式振荡器,产生频率为1MHz左右的正弦载波信号。
电涡流传感器接在振荡回路中,传感器线圈是振荡回路的一个电感元件。
振荡器作用是将位移变化引起的振荡回路的Q值变化转换成高频载波信号的幅值变化。
(2)D1、C5、L2、C6组成了由二极管和LC形成的π形滤波的检波器。
检波器的作用是将高频调幅信号中传感器检测到的低频信号取出来。
(3)Q2组成射极跟随器。
射极跟随器的作用是输入、输出匹配以获得尽可能大的不失真输出的幅度值。
电涡流传感器是通过传感器端部线圈与被测物体(导电体)间的间隙变化来测物体的振动相对位移量和静位移的,它与被测物之间没有直接的机械接触,具有很宽的使用频率范围(从0~10Hz)。
当无被测导体时,振荡器回路谐振于f0,传感器端部线圈Q0为定值且最高,对应的检波输出电压Vo最大。
当被测导体接近传感器线圈时,线圈Q值发生变化,振荡器的谐振频率发生变化,谐振曲线变得平坦,检波出的幅值Vo变小。
Vo变化反映了位移x的变化。
电涡流传感器在位移、振动、转速、探伤、厚度测量上得到应用。
三、需用器件与单元:
机头中的振动台、测微头、电涡流传感器、被测体(圆铁片);显示面板中的电压表,调理电路面板传感器输出单元中的电涡流传感器、调理电路面板中的涡流变换器,示波器。
四、实验步骤:
1、观察传感器结构,这是一个平绕线圈。
调节测微头的微分筒,使微分筒的0刻度值与套筒上的5mm刻度值对准。
按图22-4安装测微头、被测体铁圆片、电涡流传感器(注意安装顺序:
首先将测微头的安装套插入安装架的安装孔内,再将被测体铁圆片套在测微头的测杆上;然在支架上安装好电涡流传感器;最后平移测微头安装套使被测体与传感器端面相贴并拧紧测微头安装孔的紧固螺钉),再按图22-4示意接线
2、将电压表量程切换开关切换到20V档,检查接线无误后开启电源,记下电压表读数,然后逆时针调节测微头微分筒,每隔0.1mm读一个数,直到输出Vo变化很小为止并将数据列入表1(在输入端即传感器二端可接示波器观测振荡波形)。
表1电涡流传感器位移X与输出电压数据
X(mm)
……
Vo(V)
3、根据表1数据,画出V-X实验曲线,根据曲线找出线性区域比较好的范围计算灵敏度和线性度(可用最小二乘法或其它拟合直线)。
实验完毕,关闭电源。
五、实验总结:
整理实验数据,并完成实验报告。
实验四电容式传感器的位移实验
一、实验目的:
了解电容式传感器结构及其特点。
二、基本原理:
1、原理简述:
电容传感器是以各种类型的电容器为传感元件,将被测物理量转换成电容量的变化来实现测量的。
电容传感器的输出是电容的变化量。
利用电容C=εA/d关系式,通过相应的结构和测量电路可以选择ε、A、d中三个参数中保持二个参数不变,而只改变其中一个参数,则可以有测干燥度(ε变)、测位移(d变)和测液位(A变)等多种电容传感器。
电容传感器极板形状分成平板、圆板形和圆柱(圆筒)形,虽还有球面形和锯齿形等其它的形状,但一般很少用。
本实验采用的传感器为圆筒式变面积差动结构的电容式位移传感器,差动式一般优于单组(单边)式的传感器。
它灵敏度高、线性范围宽、稳定性高。
如图16-1所示:
传感器是有二个圆筒和一个圆柱组成的(A变)。
设圆筒的半径为R;圆柱的半径为r;圆柱的长为x,则电容量为C=ε2πx/ln(R/r)。
图中C1、C2是差动连接,当图中的圆柱产生∆X位移时,电容量的变化量为∆C =C1-C2=ε2π2∆X/ln(R/r),式中ε2π、ln(R/r)为常数,说明∆C与∆X位移成正比,配上配套测量电路就能测量位移。
2、测量电路(电容变换器):
测量电路画在实验模板的面板上。
其电路的核心部分是图16—2的二极管环路充放电电路。
在图16-2中,环形充放电电路由D3、D4、D5、D6二极管、C4电容、L1电感和CX1、CX2(实验差动电容位移传感器)组成。
当高频激励电压(f>100kHz)输入到a点,由低电平E1跃到高电平E2时,电容CX1和 CX2两端电压均由E1充到E2。
充电电荷一路由a点经D3到b点,再对CX1充电到O点(地);另一路由由a点经C4到c点,再经D5到d点对CX2充电到O点。
此时,D4和D6由于反偏置而截止。
在t1充电时间内,由a到c点的电荷量为:
Q1=CX2(E2-E1)
当高频激励电压由高电平E2返回到低电平E1时,电容CX1和CX2均放电。
CX1经b点、D4、c点、C4、a点、L1放电到O点;CX2经d点、D6、L1放电到O点。
在t2放电时间内由c点到a点的电荷量为:
Q2=CX1(E2-E1)
当然,(16—1)式和(16—2)式是在C4电容值远远大于传感器的CX1和CX2电容值的前提下得到的结果。
电容C4的充放电回路由图16—2中实线、虚线箭头所示。
在一个充放电周期内(T=t1+t2),由c点到a点的电荷量为:
Q=Q2-Q1=(CX1-CX2)(E2-E1)=△CX △E
式中:
CX1与CX2的变化趋势是相反的(传感器的结构决定的,是差动式)。
设激励电压频率f=1/T,则流过ac支路输出的平均电流i为:
i=fQ=f△CX △E
式中:
△E—激励电压幅值;△CX—传感器的电容变化量。
由(16—4)式可看出:
f、△E一定时,输出平均电流i与△CX成正比,此输出平均电流i经电路中的电感L2、电容C5滤波变为直流I输出,再经Rw转换成电压输出Vo1=I Rw。
由传感器原理已知∆C与∆X位移成正比,所以通过测量电路的输出电压Vo1就可知∆X位移。
3、电容式位移传感器实验原理方块图如图
三、需用器件与单元:
主机箱±15V直流稳压电源、电压表;电容传感器、电容传感器实验模板、测微头。
四、实验步骤:
1、按图16-4示意安装、接线。
2、将实验模板上的Rw调节到中间位置(方法:
逆时针转到底再顺时转3圈)。
3、将主机箱上的电压表量程切换开关打到2V档,检查接线无误后合上主机箱电源开关,旋转测微头改变电容传感器的动极板位置使电压表显示0V,再转动测微头(同一个方向)6圈,记录此时的测微头读数和电压表显示值为实验起点值。
以后,反方向每转动测微头1圈即△X=0.5mm位移读取电压表读数(这样转12圈读取相应的电压表读数),将数据填入表1中(这样单行程位移方向做实验可以消除测微头的回差)。
表1电容传感器位移实验数据
X(mm)
V(mV)
4、根据表1数据作出△X—V实验曲线并截取线性比较好的线段计算灵敏度S=△V/△X和非线性误差δ及测量范围。
实验完毕关闭电源开关。
5、实验总结:
整理实验数据,并完成实验报告。
实验七差动变压器的性能实验
一、实验目的:
了解差动变压器的工作原理和特性。
二、基本原理:
差动变压器的工作原理电磁互感原理。
差动变压器的结构如图11—1所示,由一个一次绕组1和二个二次绕组2、3及一个衔铁4组成。
差动变压器一、二次绕组间的耦合能随衔铁的移动而变化,即绕组间的互感随被测位移改变而变化。
由于把二个二次绕组反向串接(*同名端相接),以差动电势输出,所以把这种传感器称为差动变压器式电感传感器,通常简称差动变压器。
当差动变压器工作在理想情况下(忽略涡流损耗、磁滞损耗和分布电容等影响),它的等效电路如图11—2所示。
图中U1为一次绕组激励电压;M1、M2分别为一次绕组与两个二次绕组间的互感:
L1、R1分别为一次绕组的电感和有效电阻;L21、L22分别为两个二次绕组的电感;R21、R22分别为两个二次绕组的有效电阻。
对于差动变压器,当衔铁处于中间位置时,两个二次绕组互感相同,因而由一次侧激励引起的感应电动势相同。
由于两个二次绕组反向串接,所以差动输出电动势为零。
当衔铁移向二次绕组L21,这时互感M1大,M2小,因而二次绕组L21内感应电动势大于二次绕组L22内感应电动势,这时差动输出电动势不为零。
在传感器的量程内,衔铁位移越大,差动输出电动势就越大。
同样道理,当衔铁向二次绕组L22一边移动差动输出电动势仍不为零,但由于移动方向改变,所以输出电动势反相。
因此通过差动变压器输出电动势的大小和相位可以知道衔铁位移量的大小和方向。
由图11—2可以看出一次绕组的电流为:
二次绕组的感应动势为:
由于二次绕组反向串接,所以输出总电动势为:
其有效值为:
差动变压器的输出特性曲线如图11—3所示.图中E21、E22分别为两个二次绕组的输出感应电动势,E2为差动输出电动势,x表示衔铁偏离中心位置的距离。
其中E2的实线表示理想的输出特性,而虚线部分表示实际的输出特性。
E0为零点残余电动势,这是由于差动变压器制作上的不对称以及铁心位置等因素所造成的。
零点残余电动势的存在,使得传感器的输出特性在零点附近不灵敏,给测量带来误差,此值的大小是衡量差动变压器性能好坏的重要指标。
为了减小零点残余电动势可采取以下方法:
图11—3差动变压器输出特性
1、尽可能保证传感器几何尺寸、线圈电气参数及磁路的对称。
磁性材料要经过处理,消除内部的残余应力,使其性能均匀稳定。
2、选用合适的测量电路,如采用相敏整流电路。
既可判别衔铁移动方向又可改善输出特性,减小零点残余电动势。
3、采用补偿线路减小零点残余电动势。
图11—4是其中典型的几种减小零点残余电动势的补偿电路。
在差动变压器的线圈中串、并适当数值的电阻电容元件,当调整W1、W2时,可使零点残余电动势减小。
三、需用器件与单元:
主机箱中的±15V直流稳压电源、音频振荡器;差动变压器、差动变压器实验模板、测微头、双踪示波器。
四、实验步骤:
附:
测微头的组成与使用测微头组成和读数如图11—5
测微头读数图
图11—5测位头组成与读数
测微头组成:
测微头由不可动部分安装套、轴套和可动部分测杆、微分筒、微调钮组成。
测微头读数与使用:
测微头的安装套便于在支架座上固定安装,轴套上的主尺有两排刻度线,标有数字的是整毫米刻线(1mm/格),另一排是半毫米刻线(0.5mm/格);微分筒前部圆周表面上刻有50等分的刻线(0.01mm/格)。
用手旋转微分筒或微调钮时,测杆就沿轴线方向进退。
微分筒每转过1格,测杆沿轴方向移动微小位移0.01mm,这也叫测微头的分度值。
测微头的读数方法是先读轴套主尺上露出的刻度数值,注意半毫米刻线;再读与主尺横线对准微分筒上的数值、可以估读1/10分度,如图11-5甲读数为3.678mm,不是3.178mm;遇到微分筒边缘前端与主尺上某条刻线重合时,应看微分筒的示值是否过零,如图11—5乙已过零则读2.514mm;如图11—5丙未过零,则不应读为2mm,读数应为1.980mm。
测微头使用:
测微头在实验中是用来产生位移并指示出位移量的工具。
一般测微头在使用前,首先转动微分筒到10mm处(为了保留测杆轴向前、后位移的余量),再将测微头轴套上的主尺横线面向自己安装到专用支架座上,移动测微头的安装套(测微头整体移动)使测杆与被测体连接并使被测体处于合适位置(视具体实验而定)时再拧紧支架座上的紧固螺钉。
当转动测微头的微分筒时,被测体就会随测杆而位移。
1、差动变压器、测微头及实验模板按图11—6示意安装、接线。
实验模板中的L1为差动变压器的初级线圈,L2、L3为次级线圈,*号为同名端;L1的激励电压必须从主机箱中音频振荡器的Lv端子引入。
检查接线无误后合上主机箱电源开关,调节音频振荡器的频率为4kHz~5kHz、幅度为峰峰值Vp-p=2V作为差动变压器初级线圈的激励电压(示波器设置提示:
触发源选择内触发CH1、水平扫描速度TIME/DIV在0.1mS~10µS范围内选择、触发方式选择AUTO。
垂直显示方式为双踪显示DUAL、垂直输入耦合方式选择交流耦合AC、CH1灵敏度VOLTS/DIV在0.5V~1V范围内选择、CH2灵敏度VOLTS/DIV在0.1V~50mV范围内选择)。
2、差动变压器的性能实验:
使用测微头时,当来回调节微分筒使测杆产生位移的过程中本身存在机械回程差,为消除这种机械回差可用如下a、b两种方法实验,建议用b方法可以检测到差动变压器零点残余电压附近的死区范围。
a、调节测微头的微分筒(0.01mm/每小格),使微分筒的0刻度线对准轴套的10mm刻度线。
松开安装测微头的紧固螺钉,移动测微头的安装套使示波器第二通道显示的波形Vp-p(峰峰值)为较小值(越小越好,变压器铁芯大约处在中间位置)时,拧紧紧固螺钉。
仔细调节测微头的微分筒使示波器第二通道显示的波形Vp-p为最小值(零点残余电压)并定为位移的相对零点。
这时可假设其中一个方向为正位移,另一个方向位移为负,从Vp-p最小开始旋动测微头的微分筒,每隔△X=0.2mm(可取30点值)从示波器上读出输出电压Vp-p值,填入下表4,再将测位头位移退回到Vp-p最小处开始反方向(也取30点值)做相同的位移实验。
在实验过程中请注意:
⑴从Vp-p最小处决定位移方向后,测微头只能按所定方向调节位移,中途不允许回调,否则,由于测微头存在机械回差而引起位移误差;所以,实验时每点位移量须仔细调节,绝对不能调节过量,如过量则只好剔除这一点粗大误差继续做下一点实验或者回到零点重新做实验。
⑵当一个方向行程实验结束,做另一方向时,测微头回到Vp-p最小处时它的位移读数有变化(没有回到原来起始位置)是正常的,做实验时位移取相对变化量△X为定值,与测微头的起始点定在哪一根刻度线上没有关系,只要中途测微头微分筒不回调就不会引起机械回程误差。
b、调节测微头的微分筒(0.01mm/每小格),使微分筒的0刻度线对准轴套的10mm刻度线。
松开安装测微头的紧固螺钉,移动测微头的安装套使示波器第二通道显示的波形Vp-p(峰峰值)为较小值(越小越好,变压器铁芯大约处在中间位置)时,拧紧紧固螺钉,再顺时针方向转动测微头的微分筒12圈,记录此时的测微头读数和示波器CH2通道显示的波形Vp-p(峰峰值)值为实验起点值。
以后,反方向(逆时针方向)调节测微头的微分筒,每隔△X=0.2mm(可取60~70点值)从示波器上读出输出电压Vp-p值,填入表11(这样单行程位移方向做实验可以消除测微头的机械回差)。
3、根据表11数据画出X-Vp-p曲线并找出差动变压器的零点残余电压。
实验完毕,关闭电源。
表11差动变压器性能实验数据
△X(mm)
Vp-p(mV)
5、实验总结:
整理实验数据,并完成实验报告。
六、思考题
1、试分析差动变压器与一般电源变压器的异同?
2、用直流电压激励会损坏传感器。
为什么?
3、如何理解差动变压器的零点残余?
用什么方法可以减少零点残余?


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 实验1 位移测量实验 实验 位移 测量
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《爱和自由》读书心得15篇.docx
《爱和自由》读书心得15篇.docx
-
《极致服务》读后感.docx
-
《上海市饮用水水源保护条例》.docx
-
《变化社会中的政治秩序》读后感.docx
-
《吵闹村的孩子》读后感15篇.docx
-
《摆渡人》读后感受1000字左右范文.docx
-
《国际贸易学》题库南京大学.docx
-
《诚信备考》主题班会活动.docx
-
《高等学校教师职业道德修养》考试要点演示教学.docx
-
《巴菲特的护城河》精华摘要.docx
-
《繁星春水》读后感14篇.docx
-
#电控发动机的故障诊断与排除.docx
-
《归去来兮辞》优化教案及课文解析.docx
-
《办公室秘书个人党性分析材料》.docx
-
《会飞的气球》大班教案.docx
-
#生命生活与安全5上.docx
-
《城南旧事》的读后感作文范文10篇.docx
-
《标志用公共信息图形符号 第1部分通用符号》GBT 100011.docx
-
《初级会计实务》考试试题及答案解析.docx
-
《公共基础知识》考点《公文写作与处理》.docx
-
《海底世界》大班教案.docx
-
#ds18b20可调温度控制器.docx
-
《爱的教育》读书笔记范文10篇.docx
-
《公路养护工程量清单及计量规范》编制.docx
-
《建设工程监理规范》新旧版本区别.docx
-
《生活补助申请报告》.docx
-
《纸质档案管理规范》word版.docx
-
00种英语游戏.docx
-
09多元实用才能2.docx
-
《财经法规与会计职业道德》全真模拟试题及参考答案四.docx
-
14秋学前教育教育理论期中考试试题.docx
-
《大数据导论》19秋期末考核0001.docx
-
公益广告设计大赛活动策划书精选多篇Word文档下载推荐.docx
-
最全面的酱香酒知识Word文档格式.docx
-
50套初中英语阅读理解Word文件下载.docx
-
富士康BIOS中英对照表Word文档下载推荐.docx
-
按揭车辆买卖合同范本2篇Word文档格式.docx
-
正大天晴产品培训手册简要版31知识交流文档格式.docx
-
中国古典哲学名著选读文档格式.docx
-
构造柱及圈梁施工方案Word格式文档下载.docx
-
高中生的档案班主任评语集锦Word格式.docx
-
最新苏教译林版英语六年级下册单词默写版Word格式.docx
-
重大危险源安全管理方案之欧阳体创编Word文档下载推荐.docx
-
作业治疗Word文档格式.docx
-
团粒喷播绿化施工专项方案Word格式文档下载.docx
-
大班安全安全撤离教案20篇Word格式文档下载.docx
-
工作底稿法编制现金流量表范本模板Word文件下载.docx
-
窦娥冤关汉卿精品教案Word格式文档下载.docx
-
二年级下册语文 第二周教案Word格式文档下载.docx
-
静压沉桩施工记录表Word文件下载.docx
-
煤炭合同管理构件框架设计文档格式.docx
