 小车倒立摆模型建立及初步仿真.docx
小车倒立摆模型建立及初步仿真.docx
- 文档编号:3590158
- 上传时间:2022-11-24
- 格式:DOCX
- 页数:10
- 大小:317.40KB
小车倒立摆模型建立及初步仿真.docx
《小车倒立摆模型建立及初步仿真.docx》由会员分享,可在线阅读,更多相关《小车倒立摆模型建立及初步仿真.docx(10页珍藏版)》请在冰豆网上搜索。
小车倒立摆模型建立及初步仿真
实验名称:
小车倒立摆模型建立及初步仿真
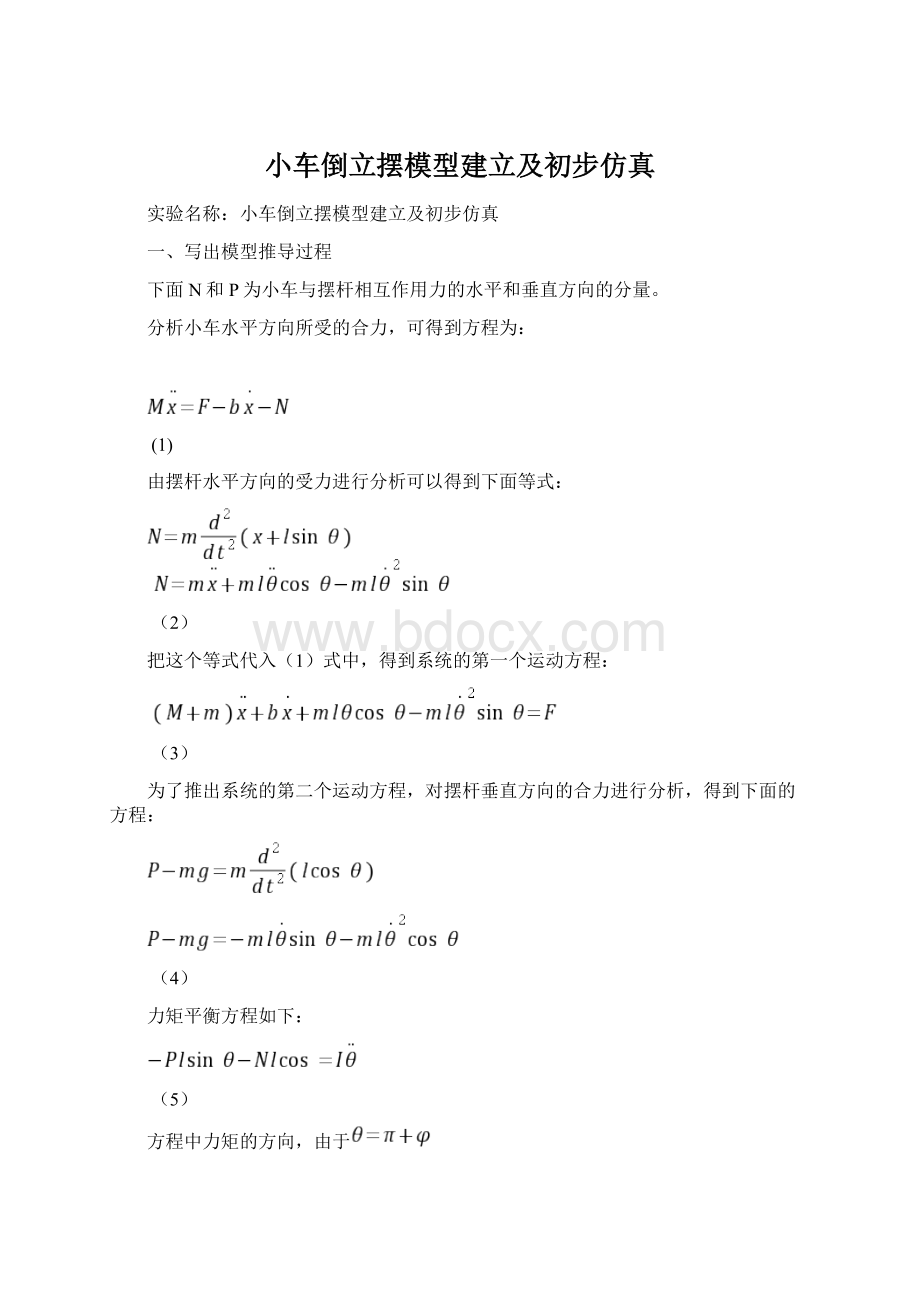
一、写出模型推导过程
下面N和P为小车与摆杆相互作用力的水平和垂直方向的分量。
分析小车水平方向所受的合力,可得到方程为:
(1)
由摆杆水平方向的受力进行分析可以得到下面等式:
(2)
把这个等式代入
(1)式中,得到系统的第一个运动方程:
(3)
为了推出系统的第二个运动方程,对摆杆垂直方向的合力进行分析,得到下面的方程:
(4)
力矩平衡方程如下:
(5)
方程中力矩的方向,由于
,
,故等式前面有负号。
合并这两个方程,约去P和N,得到第二个运动方程:
(6)
假设
与1(单位是弧度)相比很小,即
,则可进行近似处理:
用
代表被控对象的输入力,线性化后两个运动方程如下:
(7)
对方程(7)进行拉普拉斯变换,得到:
(8)
(推到时假设初始条件为0)则,
摆杆角度和小车位移的传递函数为:
摆杆角度和小车加速度之间的传递函数为:
摆杆角度和小车所受外界作用力的传递函数:
进行开环响应的仿真:
M=0.5kgm=0.2kgb=0.1N/m/sl=0.3m
I=0.006kgm2T=0.005s(采样时间)
二、开环响应的MATLAB仿真程序
%reverse_pedulumn_TF.m
%倒立摆传递函数、开环极点及开环脉冲响应
%transfuction=num/den
M=0.5;
m=0.2;
b=0.1;
I=0.006;
g=9.8;
l=0.3;
q=(M+m)*(I+m*l^2)-(m*l)^2;
%calculatethepolytransfunction
num=[m*l/q00]
den=[1b*(I+m*l^2)/q-(M+m)*m*g*l/q-b*m*g*l/q0]
my_tf=tf(num,den)
%calculatethepolarsp
[r,p,k]=residue(num,den);
s=p
%thepulsereponseofthetransfunctionanddisplay
t=0:
0.005:
5;
impulse(num,den,t)
%step(num,den,t)
%displaythefield:
lateral0-1,longititudal0-60
axis([01060])
grid
%---------end----------
Matleb仿真图像
三、摆杆质量m=0.5kg、1kg时,MATLAB传递函数表示、开环极点及脉冲响应曲线图
1、m=0.5kg
2、m=1kg


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 小车 倒立 模型 建立 初步 仿真
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《雷雨》中的蘩漪人物形象分析 1.docx
《雷雨》中的蘩漪人物形象分析 1.docx
-
《经济法基础》第三章章节练习与答案解析.docx
-
安徽省合肥市包河区卫生健康系统招聘试题及答案解析.docx
-
《河中石兽》复习过程.docx
-
版二级建造师《公路工程管理与实务》考前检测 附答案.docx
-
保密安全制度监理组5篇修改版.docx
-
北师大版届九年级上学期期末考试英语试题I卷.docx
-
PACE产品及周期优化法系统结构复习课程.docx
-
常规变电站常规设计.docx
-
初三欧姆定律计算题题型整理.docx
-
《测绘管理与法律法规》模拟试题一附答案.docx
-
2测风工岗位练兵技术比武.docx
-
《小学语文不同课型的教学模式参考》1.docx
-
15高考宁夏英语及答案教学内容.docx
-
ABS圆形笔筒课程设计说明书.docx
-
c语言程序填空题.docx
-
茶艺师高级三级教学计划大纲.docx
-
场平土石方工程施工项目组织设计.docx
-
《人力资源管理》期末试题及答案教学内容.docx
-
《河南省高等学校教师实验人员中高级专业技术职务任职资格申报评审条件试行.docx
-
01钢结构制作施工工艺标准文档.docx
-
IIR数字滤波器的设计流程图.docx
-
005纺丝作业指导书.docx
-
1991高考化学试题.docx
-
GMP审核检查表与审核员指南.docx
-
成本会计试题二.docx
-
14001讲师心态调整培训讲座讲义体验版共14页文档.docx
-
cpld矩阵键盘.docx
-
《金融服务营销》.docx
-
NHR100过程校验仪140408.docx
-
Q+ Web 改版设计小结.docx
-
八年级上册古诗词鉴赏含参考答案.docx
-
监理工作流程图及安全监理规划.docx
-
新蕾快乐英语小学一年级上册全册教案英文版.docx
-
最新人教版六年级语文上册 光曲 教案.docx
-
解析版中考语文真题精选汇编名著阅读Word版.docx
-
经济法概论试题A卷成人.docx
-
义乌市国有企业领导人员管理办法.docx
-
景观园林工程技术交底大全有关内容.docx
-
精品培训学校人教版小学语文三年级下册作文教案.docx
-
语文图文转换漫画徽标+专项练习含答案.docx
-
矿山尾矿综合开发与利用项目可行性研究报告.docx
-
品牌幼儿园家长视频监控项目解决方案.docx
-
最新土建施工员年终总结范文工作总结文档五篇.docx
-
长街镇粮食生产功能区高标准农田建设工程.docx
-
年产50万只火腿及500吨腌腊制品项目可行性研究报告.docx
-
汽车自动变速器中英文资料外文翻译文献.docx
-
最新转预备党员思想汇报格式范文思想汇报文档五篇 2.docx
-
人教版小学四年级思品与社会下册教案.docx
-
农业意见河北省人民政府办公厅关于加快转变农业发展方式的实施意见.docx
-
人教课标版小学语文三年级下册全册教学反思77页精品教案全册.docx
