 机械手实验指导书.docx
机械手实验指导书.docx
- 文档编号:4150177
- 上传时间:2022-11-28
- 格式:DOCX
- 页数:22
- 大小:675.30KB
机械手实验指导书.docx
《机械手实验指导书.docx》由会员分享,可在线阅读,更多相关《机械手实验指导书.docx(22页珍藏版)》请在冰豆网上搜索。
机械手实验指导书
99D机械手
1.系统介绍
1.199D机械手模型简介
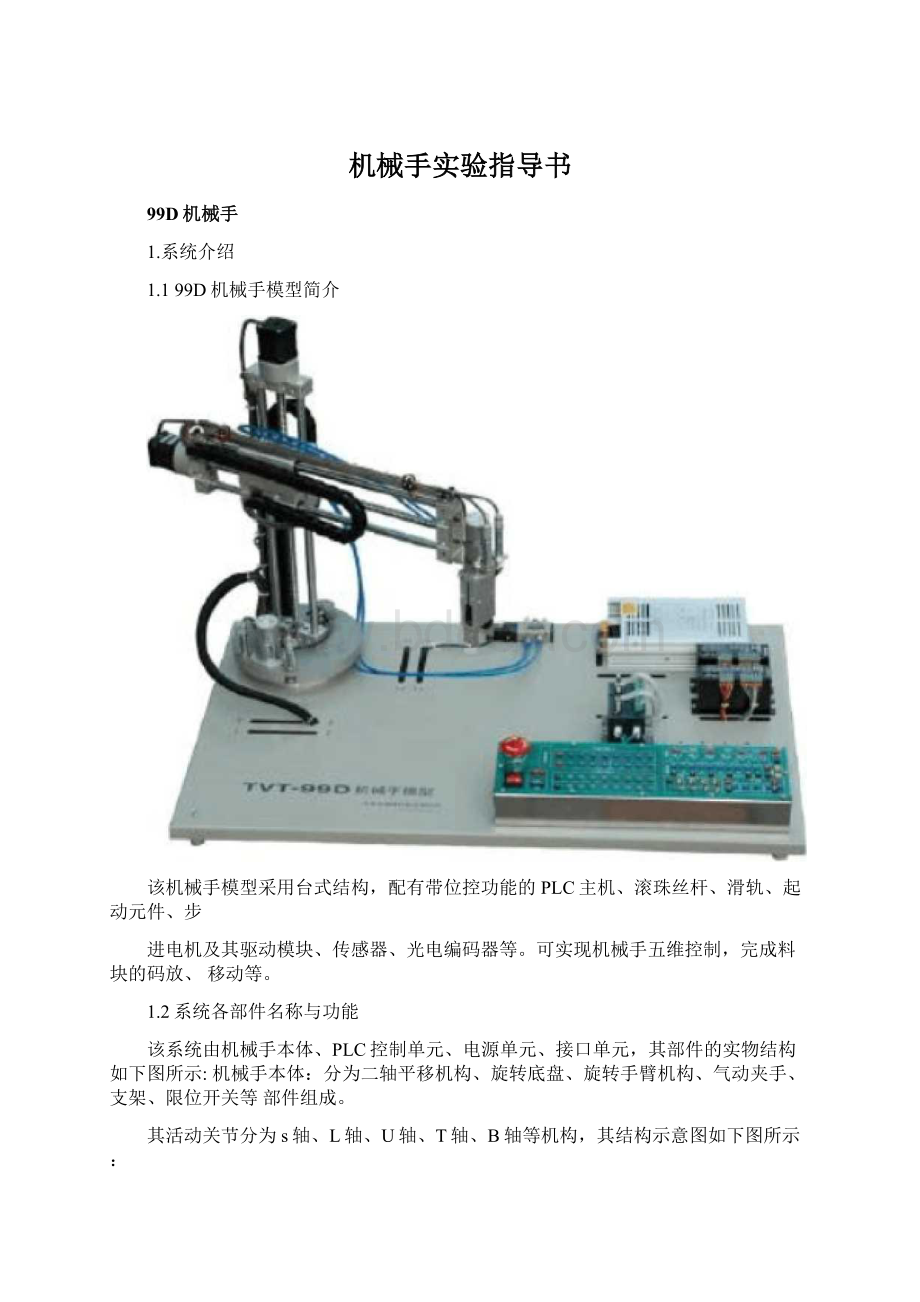
该机械手模型采用台式结构,配有带位控功能的PLC主机、滚珠丝杆、滑轨、起动元件、步
进电机及其驱动模块、传感器、光电编码器等。
可实现机械手五维控制,完成料块的码放、移动等。
1.2系统各部件名称与功能
该系统由机械手本体、PLC控制单元、电源单元、接口单元,其部件的实物结构如下图所示:
机械手本体:
分为二轴平移机构、旋转底盘、旋转手臂机构、气动夹手、支架、限位开关等部件组成。
其活动关节分为s轴、L轴、U轴、T轴、B轴等机构,其结构示意图如下图所示:
L轴
机械手本体的活动范围:
1)底盘的旋转角度:
大于270
2)旋转手臂的范围:
大于270
3)水平移动的范围:
小于21cm
4)垂直移动的范围:
小于15cm
机械!
■皿
1.3控制原理及基本工作流程
系统在电气设计上,二轴平移机构采用步进电机进行控制,旋转手臂及旋转底盘采用直流电
机进行控制,夹手采用气动电磁阀来进行控制。
机械手在动作过程的原点判断及限位保护都采用微动开关来进行设计,机械手臂以及旋转底盘的原点判断及限位保护都是采用接近开关进行检测。
为了检测底盘旋转的位移,采用旋转码盘来记录其旋转位置。
机械手的基本功能
是用于进行货物的搬运、码垛工作,一般工作的流程图如下所示:
手
札
9
*
通电,程序
系统的接线原理框图如下所示:
位置?
曲动开丈
1/
vW艮位
./
1
-轴很瓷
徽动汗芸
光电伶感襦
10.7
PLC
卷近开干
sttFPii.
「--Fg
Q0,0
10.3
PLC
Q0,0
10*0
Tl.1
11,2
1丨”卞
比几
CPUQ1°
226
3LL
on
K-
DZ-
杀宰轴方向
杀宰轴方向
注百轴77向
AH>
&EC-
u.-
M-
$
F弟
1M/2I
1L+/2I.+
IOIX-
1M/2M
1.4接线
(1)电源引线的连接
在接口单元板上每一侧都有电源输出端,如下图所示:
当系统需要DC电源供电时,只需要从最近的电源输出端引出电源线,注意上述图示的四个电源输出正端部已经内部短接,四个电源输出负端也已经内部短接。
(2)PLC的输入输出接线
PLC输入端的"M”接电源输出正端,PLC输出端的"M”接电源输出端的负端,"L+”接电
源输出的正端。
具体接线端子如表所示。
be电源输出丽pc电源输出负腐
99D接线说明(西门子)
PLC地址
面板地址
说明
IO.O
SQ3
底盘电机CP
IO.1
SQ4
竖轴上限位
IO.2
SQ7
横轴左限位
IO.3
SQ5
竖轴下限位
IO.4
SWO
IO.6
SW1
IO.7
SQ6
横轴右限位
I1.O
SQ8
抓手传感器-
I1.1
SQ9
抓手传感器+
I1.2
SQ1
底盘传感器-(左)
I1.3
SQ2
底盘传感器+(右)
QO.O
U轴CP
QO.1
L轴CP
QO.2
U轴DIR
QO.3
L轴DIR
Q1.O
T轴F
Q1.1
T轴R
Q1.2
S轴F
Q1.3
S轴R
Q1.4
B轴YV+
补充说明:
S轴为底盘、L轴为竖轴、U轴为横轴、T轴为夹手、B轴为电磁阀
PLC俞出端子,L+----24VMGND
PLC俞入端子,M——24V
接线时,面板上面,红色端子均接到24V上面,黑色端子均接到GND
拨动SWO—次,机械手完成一个动作过程,拨动SW1一次,机械手完成另一个动作过程。
※通电时,请仔细检查接线是否正确。
4.1系统的实训实验课题
实验一、在三个不同的地方分别用三个开关控制一盏信号灯,任何一地的开关动作都可以使
灯的状态发生改变,即不管开关的当前状态是打开还是关闭,只要有开关动作则灯的状态就
发生改变。
例题分析:
根据该控制,系统用三个开关实际上达到了12种状态的输入,这12种状态。
根据系统要求,系统10分配表如下:
输入接门
输由接口
FLC端
单兀槪帰口
注释
FLC端
单元板撇1
注释
g0
A地开关
g0
1.0
指示灯
10.1
S*1
PB地1
10.2
SI1
C地开决「
系统接线图
程序梯形图如下所示:
QO.O
10.0
10.0
10.1
IO1
IQ.2
山2
冋貉2
QC.1
MOO
MOO
S)
MO.O
思考题:
现在一些宾馆和家庭客厅中的装饰灯,是利用一个开关来实现不同的控制组合,例如:
房间
内有1,2,3号三个灯,按动一下开关,三个灯全亮;再按一下,1,3号灯亮,2号灭;再按
一下,2号灯亮,1,3号灭;再按一下全部灭。
写出10分配表,设计梯形图程序。
实验二、使用旋转码盘进行定位控制,控制底盘旋转30。
后停止运行。
输入接丨1
输出接【1
PLC端
单元板期口|
注释
PLC瑞
变倾器接丨[
注释
10.0
SW
旋转码盘脉种输出
Q0.0
SW-F
控制底盘屯机旋转
10,1
SVO
界动底盘旋转信廿
10.2
S¥1
高数讣数聯复位佶号
在CPU226PLC中,共有6个高数计数器,每个高数计数器有11种模式,我们可以选择计数
器HSCQ选择模式为1,通过编程软件的向导指令,可以完成题目要求。
1)打开编程软件,从【工具】栏进入到“位置控制向导”,如下图所示:
文本显示向导⑴…S7-200EwplorerTDkeypadDesigner
位置控制向导広〕…
(2)进入指令向导界面。
在指令向导中,支持三种指令功能:
PIDNETR/NETW、HSG
使用高数计数功能应选择HSC,然后点击下一步,见下图所示:
(3)配置高数计数器。
从HC0~HC5中选择一个高数计数器。
选择不同的高数计数器所
使用的外部输入信号不同。
选择HCO,输入点为I0.0、10.1,102
每个高数计数器最多有11种工作模式,选择模式1,控制方式为带有内部方向控制的单
相/减计数器,没有启动输入,带有复位输入信号。
输入点I0.0为脉冲时钟输入端口,I0.2为复位输入操作。
设置如下图所示,完成后点击下一步。
(4)初始化HC0。
在初始化选项中,需要给子程序命名。
系统默认名称为HSC_INIT;
设定高数计数器的预置值(PV)为1000,计数器的当前值为0,计数器的初始计数方向
为增,复位输入信号为高电平有效,具体设置为:
(5)设置HCO的中断事件,当高数计数器的预置值与计数器当前值相等时,产生中断事件
6)当计数器的经过值与预置值相等时,高数计数器的任何一个动态参数都可以被更新,在这里,更新预置值为0•操作见下图所示:
7)完成指令向导。
向导完成后,会自动生成一个子程序HSC_INIT和一个中断程序“COUNT_EQ”,在编程序时直接调用就可以了。
8)回到编程界面,在“调用子程序”中就会增加“HSC_INIT”•见下图所示。
■»k*-ElVtArW:
・■<
-is调用圧程序
口5B电O(SERO]
口H5匚INIT(SBR1]
9)编写子程序
中新程序COUNT_EQ如下所示t
1咗筋缭
1岡竝毓題
1呼駐释
SM0.I
I
HSCJNIT
EN
ITO
2
[
I
Qnn
fWf1EC_IBIT的梯瞻图如下*
当系统开始运行时,调用子程序HSC_INIT。
子程序的目的是用于初始化HSCO,将其
控制字节SMB47设置为16#F8,即允许计数、写入新的当前值、写入新的预置值、写入新的计数方向,设置初始计数方向为加计数,启动输入信号和复位输入信号都是高电平有效。
当HSCO的计数脉冲达到设定值1000时,调用中断程序“COUNT_EQ”,将SMD48的位置变为0,即清除高数计数器的当前值。
同时设置完成标志位M0.0。
当I0.1触点闭合时,Q0.0吸合,底盘电机启动,开始转动,同时编码器的经过值HC0
开始增加,当经过值达到1000时,启动中断程序,标志位M0.0置1,底盘停止运行。
步进电机控制操作训练
1单轴步进电机定位控制
当按下控制开关SWO时,机械手从当前位置沿X轴右行10cm,当拨回控制开关SWO时,机械手回到初始位置。
7(脉冲Q
10001
10L(cm)
由于题意中未规定电机的运行速度,不妨假设电机的速度为1000脉冲/s,因此只需要PLC
自带的脉冲输出信号PLS指令就可以完成要求。
系统10分配表如下:
输入接口
输出接LI
PLC端
睢尤板錮U
注释
PLC瑞
单无板接口
10.4
SW0
予动控制开关
go
U轴-UP
水平轴电机賊冲们号
10.7
SQ6CLMT-)
U紬原点
Q0.2
VM-D1R
水亍紬电机方向仍号
10,2
sq7(urr+)
U軸限位
思考题:
如何测算电机的脉冲数与其实际行走距离之间的换算关系?
如何考虑电机的左右限位,应该如何修改程序?
参照程序,编写电机行走15cm的梯形图程序,并上机调试。
当按下控制开关SWO时,机械手从当前位置以500Hz速度运行5cm,然后以1000Hz速度运行5cm,接着以1500Hz速度运行5cm,最后以500Hz速度运行5cm结束,打开控制SW0时,系统回到初始位置。
系统10分配表
箍人農口
输川it口
职兀机端口
PLC请
融儿Mtu
辻释
la1
SW0
QOLO
LWCP
水平詢电礼嚨沖儁吁
la;
sy&CLtfl-)
U轴凱点
00.2
U^-DR
水平辅电机方向俏号
LQ.2
yrUMT*)
UttM也
接线图
程序如下所示:
T40
1
SMG67
MOO
—<^SCFE)
!
illl
STR
SMOO
IN
TON
-
PT
100ms
T4I
T41
SM66.7
T38
M0.1
S02
—(sue)
!
;ll?
SMOO
I_SCR0
Q02
—s)
Y")
SMOO
IN
TON
1-
PT
1QOm$
T43
光电传感器定位及限位检测技术操作训练
例题1、分别用六个传感器检测三个轴的原点及限位,要求:
当系统初始化时,各个轴回到自己的原点,当系统运行过程中达到某个轴的限位时,立即停止当前轴的动作。
输入接UJ
输出接口
PLC端
单元板端U
注释
PLC端
也元板接LI
注释
10.0
SQ3
旋转码盘脉冲输出
Iqo.o
U轴・CP
水平轴脉冲信号
IO.1
SOI
L轴原点(水W•方向)
Q0・1
L轴・CP
垂直轴脉冲倍号
IO.2
SQ7
U轴限位(垂直方向)
Q0.2
U轴・DIR
水平轴方向怙号
10.3
SQ5
L轴限位(水平方向)
Q0.3
L轴・D1R
水平轴方向信号
10.7
SQ6
U轴原点垂厲方向)
Q0.4
S轴・F
底盘顺时针转动
ILO
SQ1
T轴原点(T-W)
Q0.5
S轴・R
底盘逆时针转动
11.1
SQ2
T轴限位(于•臂)
Q0.6
T轴・F
于骨顺时针转动
11.2
SQ8
S轴原点(底盘)
Q0.7
T轴・R
于臂逆时针转动
11.3
SQ9
S轴限位(底盘)
Q1.0
B轴・YV
气动夹手
微动开关
PLC
U5由原点
聘开关谢限位
啓开关⑸原点
琴开关L轴限位
光电传感丢
■一©今旋轉码盘
接近开关
一DC令
一
接近开关
戶近开关十令
4_〜
喪近开关
—DC令
DC・DC・
水平轴方向
10.7
10.2
Q0.0
Q0.1
10.1
Q0.2
10.0
Q1.2
S箱原点
11.0
Q1.3
S轴限位
Q1.4
11.1
T轴原点
11.2
1M/2M
T轴限位
11.3
1M/2M
电磁阀
10.3
PLC
CPUQk0
226Qkl
1L+/2U
开关电源
24V0V
CPDIR
OPT
A
*DC・BDC-B
CP
u丄展
0H
A
A
X*
B
DC・
B
)
垂宜轴方向
|直流电枷
I直流电枷
DC"DC・
107
5MK.7
11
11f\
aaiio-
speed^L
20000
tpeecLH
■JdO.':
'
mi
Q1.3
R
Iou
IT?
QI1
R
SMES.7
111
111
匸ff
zfj,r
iprtd_L
2:
Q:
-
-380010^
n.o
mi
013
<£)
qia
(A)
Fl
II;
机械手操作训练
实验1机械手运动轨迹控制训练操作
在下面坐标系统中,设计系统从A点移动到B点,假设A的坐标为(xO,yO)B的坐标
为(x1,y1),是编写一个调用程序,当输入A点坐标及B点坐标后,系统能完成转移。
程序解释:
A点,A点到C
系统从A点到B点,在坐标系统中可以分解成三个步骤,即从原点到点,C点到B点,其中C点是A点在平面上的映射点,如下图所示:
sc=;
口in
实验2、
机械手工作过程如下:
通电后,机械手先执行复位,然后,机械手臂前伸,手开始旋转至所需要位置;机械手臂下降至物品处,手张开,然后抓手夹紧物品,机械手臂上升将物品拿起。
机械手臂收回,底盘旋转,底盘旋转至指定位置后,机械手臂前升,机械手旋转;手臂下降,手张开将物品放下;机械手臂上升,手复位,一个工作周期结束。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械手 实验 指导书
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
消防设计技术审查的要点Word文档格式.docx
-
第三章 习题课 带电粒子在磁场或复合场中的运动Word格式.docx
-
湖南岳阳中考英语模拟卷含答案Word文档格式.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
 互联网金融概述中国金融出版社.pptx
互联网金融概述中国金融出版社.pptx
-
五、企业知识产权工作实务.ppt
-
五、薪酬管理(10.05).ppt
-
上海自由贸易区全面介绍.ppt
-
五、磋商阶段.ppt
-
互联网金融简析.ppt
-
亓雅三维旅游移动媒体方案.ppt
-
五一班《我是光荣的少先队员》主题队会.ppt
-
互联网营销趋势分析.ppt
-
五十铃、丰田公司研究报告.pptx
-
上海美食介绍PPT.ppt
-
五力模型、swot.ppt
-
五丰200G汤圆提案.ppt
-
五次促成close话术(讲解版).ppt
-
上海纪念路房地产项目提案报告.ppt
-
上海虹桥机场10.11事故案例(1).pptx
-
上海通用SSI销售流程管理-接待、交车、回访.ppt
-
五档买卖盘案例分析.ppt
-
上海自贸园区与我国创新开放模式探索(1).ppt
