 用平面二连杆机器人为例贯穿运动学雅可比动力学轨迹规划甚至控制与编程.docx
用平面二连杆机器人为例贯穿运动学雅可比动力学轨迹规划甚至控制与编程.docx
- 文档编号:6141492
- 上传时间:2023-01-04
- 格式:DOCX
- 页数:24
- 大小:280.98KB
用平面二连杆机器人为例贯穿运动学雅可比动力学轨迹规划甚至控制与编程.docx
《用平面二连杆机器人为例贯穿运动学雅可比动力学轨迹规划甚至控制与编程.docx》由会员分享,可在线阅读,更多相关《用平面二连杆机器人为例贯穿运动学雅可比动力学轨迹规划甚至控制与编程.docx(24页珍藏版)》请在冰豆网上搜索。
用平面二连杆机器人为例贯穿运动学雅可比动力学轨迹规划甚至控制与编程
一、平面二连杆机器人手臂运动学
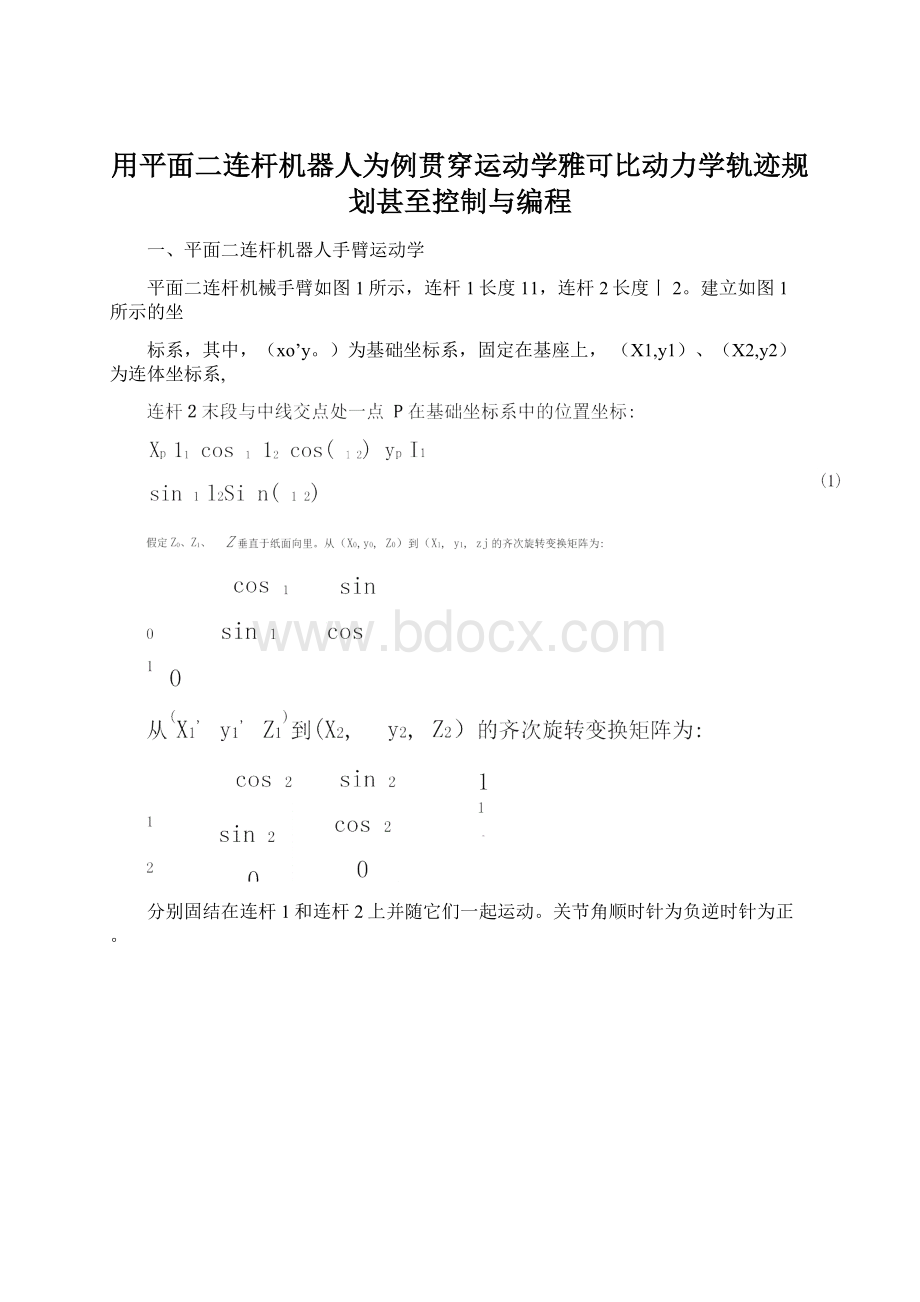
平面二连杆机械手臂如图1所示,连杆1长度11,连杆2长度丨2。
建立如图1所示的坐
标系,其中,(xo’y。
)为基础坐标系,固定在基座上,(X1,y1)、(X2,y2)为连体坐标系,
分别固结在连杆1和连杆2上并随它们一起运动。
关节角顺时针为负逆时针为正。
图1平面双连杆机器人示意图
1、用简单的平面几何关系建立运动学方程
2、用D-H方法建立运动学方程
从(X0,y0,Z0)到(X2,y2,Z2)的齐次旋转变换矩阵为:
cos1
sin
cos
cos2
sin2
0
cos
11
0
cos(1
sin(1
0
sin(
cos(1
0
2)
2)
l1cos
l1sin
0
(4)
那么,连杆2末段与中线交点处一点P在基础坐标系中的位置矢量为:
0P0t2p
cos(1sin(
2)
2)
sin(1cos(1
0
2)
2)
l1cos
l1sin
0
12
0
即,
Xp
yp
l1cos
l1sin
11COS1
11sin1
l2cos(1
l2sin(1
0
2)
2)
Xp
yp
Zp
1
12cos(1
l2sin(1
2)
2)
(6)
与用简单的平面几何关系建立运动学方程(
1)相同。
建立以上运动学方程后,若已知个连杆的关节角
1、
2,就可以用运动学方程求出机
械手臂末端位置坐标,这可以用于运动学仿真。
3、平面二连杆机器人手臂逆运动学
可以用运动学方程求出机械手臂
建立以上运动学方程后,若已知个机械臂的末端位置,
二连杆的关节角
1、
2,这叫机械臂的逆运动学。
逆运动学可以用于对机械臂关节角和末
端位置的控制。
对于本例中平面二连杆机械臂,其逆运动学方程的建立就是已知末端位置
ypI1sin1l2sin(1
(1)问题
Xpl1cos112cos(12)
2)
(2)求1
由(6)式得到:
2
(XpI1cos1)
(yphsin1)2I;
(7)
整理得到:
2
Xp
2
yp
I12
2I1(Xpcos1
ypSin
1)
(8)
Xp
yp
tg
sin
(9)
cos
由(8)式得到:
2
Xp
2
yp
112
I;
-^^(cos1
cosp
cosp
sin1sin
p)
2
Xp
2
yp
I12
I;
^^cos(1
cosp
p)
(10)
由此可解出
1arccos
2
Xp
2I2I2
ypI1I2
cos2I1Xp
arctg匹
Xp
(11)
(3)求2
由(6)式得到:
[XpI2cos(
2)]2[ypI2sin(1
2)]2I12
(12)
整理得到:
2
Xp
2
yp
I22
I12
2l2[Xpcos(1
2)
ypSin(1
2)]
(13)
Xp
tg
sin
yp
cos
(14)
由(14)式得到:
22,2,2
XpypI2I1
2I2Xpr/
[cos(1cosp
2I2Xp(
cos(1cosp
2)cospsin(
12)sin
p]
(15)
由此可解出
2p)
2arccoscosp
2l2Xp
arctg竺1
Xp
二、平面二连杆机器人手臂的速度雅可比矩阵
现已二连杆平面机器
速度雅可比矩阵的定义:
从关节速度向末端操作速度的线性变换。
人为例推导速度雅可比矩阵。
Xpl1cos112cos(12)
ypl1sin1l2sin(12)
把上式写成如下的矩阵形式:
令上式中的末端位置速度矢量
XP
yp
关节角速度矢量
以写成:
J(1,2)
速度雅可比矩阵可以进一步写成:
其中,
J11
Xp
J12
Xp
l2sin(1
(20)
J21
yp
11COS1
l2cos(1
2)
J22
yp
l2cos(1
2)
由此可知雅可比矩阵的定义:
Xp
Xp
J11
J(1,2)
J21
J12
J22
1
yp
2
yp
(21)
三、平面二连杆机器人手臂的动力学方程
推倒动力学方程的方法很多,各有优缺点。
拉格朗日方法思路清晰、不考虑连杆之间的内力,是推倒动力学方程的常用方法。
下面推导图1所示的平面双连杆机器人的动力学方程。
丄m1l12
6
(21)
1、求两连杆的拉格朗日函数
(1)求系统总动能
连杆1的动能为:
1
K1—Ia
2
11.-(-m1l1)23
连杆2质心速度为:
Xd
11sin1
Yd
I1cos1
1l2sin(
2
1
一12cos(
2
(23)
22
XdyD
(l12
4|22
1,2COS
2)12
;I2222(1|22
|1|2cos2)12
连杆2的动能:
K21Id(12)2
2
1,1宀2(12m2l2)(1
1Z|21I2
2m2(l13l2
—mzVD
2
212
2)2-m2[(l12
2
l112cos2)1
1l2
—12
4
112
—m2l2
6
1112cos2)1
系统总动能:
KK1K2
1l22
1
如仙2
1*2COS2)
(24)
12
(尹l1l2cos2)12]
如2(窪
23
l1l2COS
(25)
6叫12
1m2l|
6
-m2I1I2cos2)
1,2,2
—m2(—12
23
-m2l2
622
11I2COS2)1
2(3m2l2
3
(26)
(2)求系统总势能系统总势能为:
1
P-miigl1sin
m2g(l1sin1-l2sin(1
2))
(27)
(3)求拉格朗日函数
1m1l12
6
丄m2l22
6
(1m2l12
2
1
—m1gl1sin1m2g[l1sin
12
一m2hl2cos2)12
1
-l2sin(12)]
2
」m2l22
6
(1
m212
1
一mzhl?
cos2)12
2
(28)
(4)列写动力学方程
按照拉格朗日方程,对应关节
1、2的驱动力矩分别为:
(29)
2
(m2l1
121
-m1l1-m2l
33
12
(-m2l2
3
1
^mzhlzcos2)2
ml;
同理:
2I2
(mzh—m*13
m2l1l2sin21
(討
玩12
3
m2l1l2sin
联合
mOglicos
1m2l2m2l1l2cos
3
1m2l1l2sin222
2
2m2gl2cos(1
112
-m2l2
3
1.
12—m21112sin2
2
m2l1l2cos2)
2)1
2)
如22
1
-m2l1l2
2
1
-mzl^sin2
2
(1m2lf1m2l1l2cos
32
1m2l1l2cos
2
cos2)
1
—m2l1l2
2
121
(—m?
]?
—m2l112cos2)2
32
1
-m2l1l2cos2)2
2
(1m2l|
1
(—m1m2)gl1cos1
2
1m2l2
3
sin
1m2l1l2sin
2
1
-m2gl2cos(
2)13m2l2
3
1mzhl?
sin
2
(30)、(31)式,将动力学方程写成如下矩阵形式:
-m1l12
3
112
-m2l2
3
1m2l2'm2l1l2cos
3
1
-m2l1l2cos2
2
1,2
2—EqI2
3
1
-m
2
1I2
-m2l2
3
1
—m2l1l2sin
2
1m2l1l2sin
2
2
1
2
2
m2l1l2sin
0
(如
m2)gl1cos1
四、平面二连杆机器人手臂的轨迹规划
1
2m2gl2cos(12)
(30)
2)
1
2m2gl2cos(12)
(31)
im2gl2cos(12)
im2gl2cos(12)
轨迹规划就是已知起点和终点的位置速度加速度等参数确定中间点的相应参数的过程。
轨迹规划是机器人完成规定任务所必需的。
它分为关节空间的轨迹规划和直角坐标空间的轨迹规划、以及基于动力学的轨迹规划等几种类型。
关节空间的轨迹规划就是已知某连杆起点和终点的角位置角速度角加速度等参数确定中间点的相应参数的过程。
确定中间位置的关节角。
规划的缺点。
如图所示,一两自由度机械手,已知两连杆起点和终点的关节角,
2)末端位置的轨迹、
(1)非归一化和归一化问题
关节空间轨迹
ffin由廈机人jt业空《的扉訂-ft込谢
阿自由度机器扎关节空阖的旧--td功
三次多项式轨迹规划
要求:
机器人匕苹毛节柱运动开捲时劉百的角度誨氏「
在时裁“运动到鹿牛.用三次李顼武羽划富淀节的运
曲Uq+qF卜/+5代
战分1■引'
武…
II-300q=54*(;]=一也72
举例:
要求一个5轴机器人的第一关节在5秒之内从初始角30度运动到终端角75度,用三次多项式计算在第1、2、3、4秒时的关节角。
呦)=坏+c,(5)+5愕)+匚期')=75T5盹j=口■0I裾}之严2^妙+以円"
由此得到位粗.遽度和丿JU連厦的多顼式方程如卜‘:
0(0-30+5护-0.72/'鮒)=10.8/-
盹)二10.ft-452f
秒
图5・K)例5-1中的关节位置、速®和加速度
五次多项式轨迹规划
已知林器人上某关节在运动开始时刻q-0的角S为坊.速度a.
加速度a,在时刻£丁运动到扇度勺.速度为®、加返度为a°更求用五次多项武规划该关节的运动•*
3(f)—t?
Q+qr+cf++qf+qf[
初始冬件与末端条畔,-
呛〕二眼灰iJ=O.3沖
■I**■
=診f、=0'I日%)=日fd
确定系数亡Q、Cp勺、C;彗沖岂,以礁定占(t)*Q(t)、&(t)的表迖式口*
ff同啊5.1,且已知初绘加建度和未靖嶽速度均为5度f叭
解:
30'
由圖5」和给出的加追度俭得到,
$-3(ra-0度/秒玄・5度/涉1
®—75'&f=0展/秒毎M—5屢/秒,
特初猛和末谴边界齋件代入式(5.5)-式朽.?
h得出:
5=酣G=0咒-2d
6=1.6--0.5^!
fi*0.04^4
遗而f旱到如下运动方程;
9{t}■30+25f=+1.6(=*-心《卢+0-0464卢
*0-3f+4.8/^-2.32?
+0.252(*
0⑴=5+y血f一臥淅2+0.928?
图5」2是机龍人关T的位置、連度和加連屢曲线,英*大加速度秒丁。
图5.12例5.3的关节位置、速度和加速度
(a)
(b)
(c)
(d)
(e)
抛物线过渡的线性运动轨迹规划(略)
具有中间点以及用抛物线过渡的线性运动轨迹规划(略)高次多项式运动轨迹规划(略)
直角坐标空间的轨迹规划
(1)所有用于关节空间的轨迹规划方法都可以用于直角坐标空间轨迹规划;
(2)直角坐标轨迹规划必须不断进行逆运动学运算,以便及时得到关节角。
这个过程可以归纳为以下计算循环:
将时间增加一个增量;
利用所选择的轨迹函数计算出手的位姿;利用逆运动学方程计算相应的关节变量;将关节变量信息送给控制器;
返回到循环的开始。
例5一6-牛两自由A+*机5人*岸从起点(3,10)沿直域运劫到烬点(3,14Jo栓分为10段,求出机蛊人对关节童量.每一摧连评的枚塵沟9芙寸九
解:
克粛坐标空间中規点和蚌点间飾直找可以描述为1y-1414-山
F*0恐+7.6
中间点的坐标可以通过将起点和终点的LV坐标之羔简单地加以分割得到,然后通过求解逆运动学方程得到对应每个中间点的朗个关节角口结果见表3.1和图5.17.
表51例5-6的坐标和关节角
#
耳
y
桝
爲
1
3
10
18.8
109
2
3.5
10+4
19
104.0
3
4
108
19.5
100.4
4
4.5'
1L2
202
95,8
5
5
1L6
2L3
90.9
6
5.5
12
22.5
85,7
7
6
12.4
24.1
80J
8
65
'12.8
26
74+2
9
7
13,2
28.2
67.8
10
T5
13,6
30.8
60+7
11
6
14
33.9
52.8
中间点数
例民7加科福尼亚理工学院实验宣研究佼用的一个3自由度机器人有两楫连杆,每椎连杆七
9英寸.知图5」8所示.W设定义±标羸使将当所有关节厨均为。
时手臂处于垂克向上状島"
图二僧制5」7机3S人及耳樂标系
晏术机S人沼直找从点(9.乞10}秽动到点(3、5.«).求J个关节在毎个中间点的角度值.创出达些馬度随。
已抑rii帆醫人的遛运动学才/为:
«]-arctan(-P/PJ
s-nrcm[(齐51十6】+齐岛"(攻1+Q)C,)1
矗感^突际矗用申^^康和挣点乏闽*分虛许$很小部^^\但求解本斑时只将其分为10W:
每牛中间点时坐标可简单址通过将越点和终点之间的題需瓏行10#分得到O逋过求解連适动学才粒即町鼻得毎牛中间点的关节禽*施果知表5注所示,图書.19显示了相应的旻节痢曲
«5.2例&.7^S人的手坐标坐标总董节JU
X
r
Z
#,
粒
*j
g
6
边
56J
HM.7
272
&4
5.9
9卫
M.9
Ifl^I
25.4
7J
5.8
d
1U.6
23A
73
S.7
»4
51.6
in.9
22-4
5.6
»;
497
Ul-9
21.2
6
5.5
9
砒5
llS.ft
知
5.4
5.4
«.8
45
1293
W,3
4.»
5.3
8.6
til
133
13.7
4.2
S.2
S.4
sa.9
1343
1«4
3.«
5,1
»3
3!
3
139.4
10.S
5
ft
JI
1如
IB.9
图生19
例£7机器人的关节角曲线
五、二连杆机器人的控制


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 平面 连杆 机器 人为 贯穿 运动学 可比 动力学 轨迹 规划 甚至 控制 编程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
-
晋城职业技术学院师德师风考评办法文档格式.docx
-
对大学生早晚自习出勤的调研Word文件下载.docx
-
浅论我国容隐制度及其现实意义Word文件下载.docx
-
教学设计《z c s》人教版部编本一年级上册语文教案Word格式文档下载.docx
-
九年级物理上册 第十四章《欧姆定律的计算》导学案 沪粤版Word格式.docx
-
最新山东省聊城市初中学业考试试题及答案Word文件下载.docx
-
乐山市中职学校教师技能大赛竞赛方案初稿1Word文件下载.docx
-
湖南省房屋建筑和市政基础设施工程标准施工招标文件模板.docx
-
精选大学《计算机基础》期末完整题库300题含答案Word文件下载.docx
-
大学英语一期末考试题以及答案讲课稿.docx
-
扩展商务英语视听说18单元答案Word下载.docx
-
关于奋斗的作文800字高三奋斗作文五篇精选.docx
-
部门岗位职责大全Word格式.docx
-
辣椒油剁椒辣椒酱的制作独门秘籍Word格式.docx
-
手术室护士进修小结Word格式文档下载.docx
-
高考满分作文十篇Word格式.docx
-
防雷接地规范标准Word格式文档下载.docx
-
特岗教师招聘小学语文专业知识试题及答案终审稿Word格式.docx
-
江苏公务员行测B类Word下载.docx
