 绿化场之搬运机具.docx
绿化场之搬运机具.docx
- 文档编号:6212117
- 上传时间:2023-01-04
- 格式:DOCX
- 页数:35
- 大小:676.13KB
绿化场之搬运机具.docx
《绿化场之搬运机具.docx》由会员分享,可在线阅读,更多相关《绿化场之搬运机具.docx(35页珍藏版)》请在冰豆网上搜索。
绿化场之搬运机具
綠化場之搬運機具
在水稻育苗中心的作業中,秧苗搬運一向費時費力,尤其是入苗和出苗作業。
所謂的入苗係指苗箱在播種催芽後,搬運至綠化場排放的作業;出苗則是秧苗長成後從綠化場收集及運出的作業。
最近因農業生產結構的轉變,農村勞力老化及嚴重短缺,秧苗生產成本居高不下。
因此許多大規模育苗中心都採用空中輸送機為搬運系統,進行綠化場內苗箱的運送,使苗箱搬運減少相當多的勞力及作業辛勞度。
該系統具有作業效率高、作業較輕鬆的優點。
經對空中輸送機系統做為搬運系統建立入苗和出苗作業模擬結果指出:
使用該系統進行作業,需要7人組成一作業組,方具有較佳之作業效率。
其中入苗作業時,將苗箱搬上輸送帶需2人;排箱則需要5人,如此每小時可完成約3,716箱。
出苗時,亦需要7人作業組,可獲得最佳的作業效率,此時需要3個捲苗工人;2個苗箱搬運工人;2個捲苗堆疊工人。
由此可知,傳統的入苗和出苗作業需要相當多的人力,在現今人工缺乏且僱工不易的情形下,勢必需要將這些耗工且費力的工作,藉由機械來取代人力作業。
一、空中輸送機
輸送帶常被用於育苗中心之入苗及出苗的搬運工作,此種搬運方式屬於連續式的搬運,在搬運時需先佈置好輸送的路徑,搬運流動強度大。
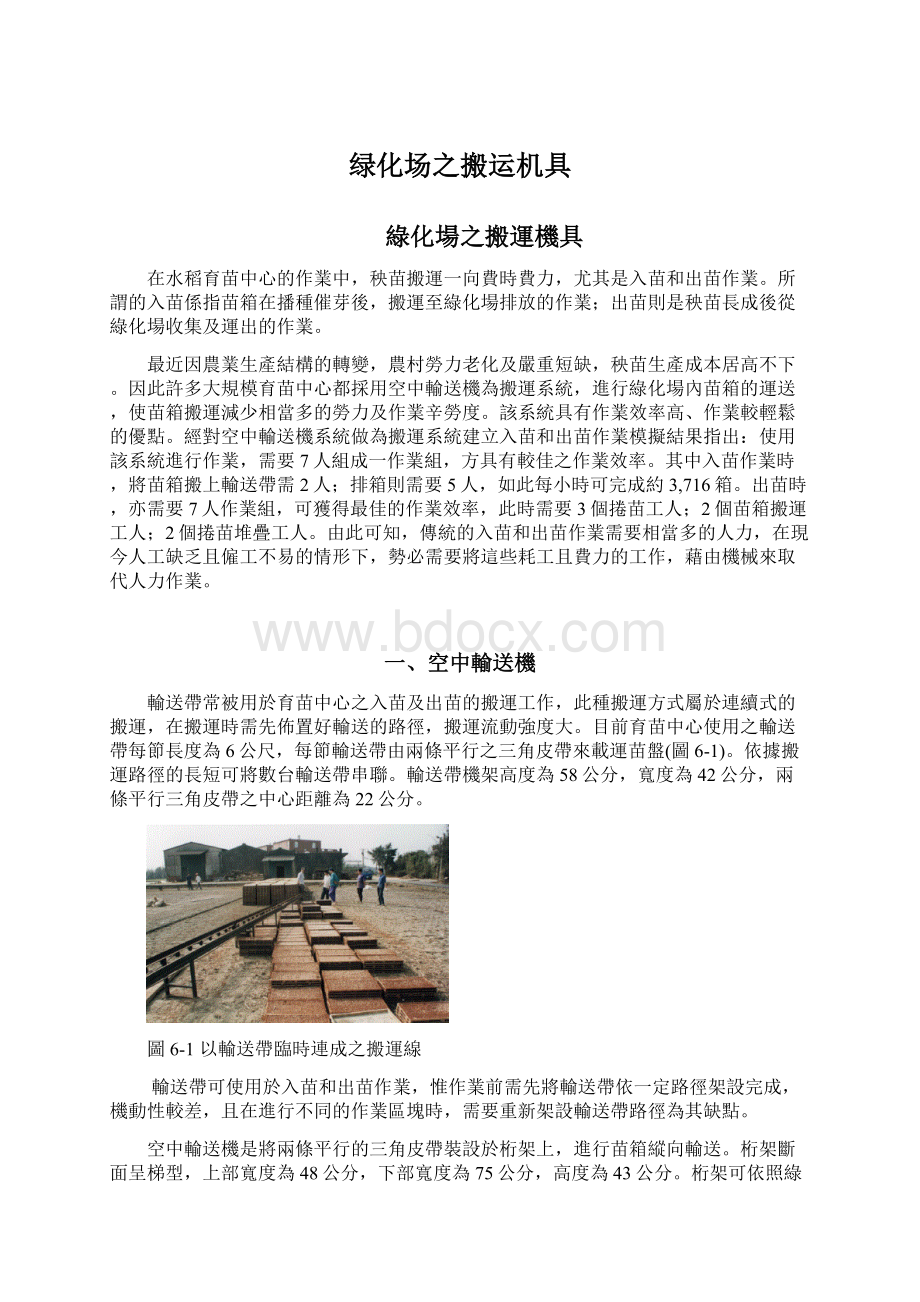
目前育苗中心使用之輸送帶每節長度為6公尺,每節輸送帶由兩條平行之三角皮帶來載運苗盤(圖6-1)。
依據搬運路徑的長短可將數台輸送帶串聯。
輸送帶機架高度為58公分,寬度為42公分,兩條平行三角皮帶之中心距離為22公分。
圖6-1以輸送帶臨時連成之搬運線
輸送帶可使用於入苗和出苗作業,惟作業前需先將輸送帶依一定路徑架設完成,機動性較差,且在進行不同的作業區塊時,需要重新架設輸送帶路徑為其缺點。
空中輸送機是將兩條平行的三角皮帶裝設於桁架上,進行苗箱縱向輸送。
桁架斷面呈梯型,上部寬度為48公分,下部寬度為75公分,高度為43公分。
桁架可依照綠化場長度大小來進行多節串聯銜接。
每節桁架均設有開關,可控制所有輸送帶運轉或停止,桁架兩端具有驅動輪,以馬達同步驅動做橫向移動。
圖6-2.不同型式之空中搬運系統
驅動輪行走於水泥砌成之軌道上,軌道寬度為30公分。
由於此種搬運系統採用X-Y方向移動的原理,因此綠化場區塊需呈長方型或正方型,作業時方能涵蓋整個綠化場。
圖1為空中輸送機系統。
目前入苗時,苗箱從輸送機上搬運至田間排放(卸箱),以及出苗時的苗箱取出(取箱)等兩項作業,尚需完全仰賴人工,工人需彎腰工作,相當辛苦,如圖6-2和圖6-3所示。
圖6-4.人工卸箱作業
圖6-5.人工取箱及捲苗作業
因此亟需開發自動化作業機械,來取代人工作業。
鑑於此,馮(1996)進行研製往復式自動卸取箱機,採用垂直升降運送苗箱,進行間歇式卸取箱作業,每次作業兩排。
卸取箱機採用可程式控制器做程序控制,利用更換控制晶片來選擇不同的作業模式,可以變換之作業模式有:
每畦苗箱的列數、畦溝寬度,以及選擇每次三箱一疊排放或每次一箱排放。
由於採用間歇方式作業,每次一箱排放的情形下,每小時僅約可完成350箱,作業速度緩慢。
若採用每次三箱一疊的模式排放,則每小時可排放1,000箱左右,但尚需2名工人將三箱一疊的苗箱排開,屬於半自動的作業模式。
因此現有育苗中心仍盼望能有一較快速且全自動作業的卸取箱機問世,藉此取代人力作業(圖6-5)。
二﹑綠化場之搬運與規劃
綠化場是一個固定的場所﹐對搬運作業而言﹐是一個頗適合進行自動化之對象。
其間除苗盤之堆積、輸送、卸箱、取箱及捲苗等程外﹐尚需要各項管理作業如塑膠布覆蓋﹑灌溉﹑噴藥等作業。
解決這些問題應可在田間搭配固定的機械與設備﹐使其具備自動化的型式。
目前已有許多育苗場利用軌車或特殊設計之運搬機械﹐進行縱橫方向之運搬控制﹐使搬運的工作更加自動化。
未來若能搭配自動卸取箱裝置﹐使苗盤能自動地藉由這套系統運送至綠化場之任意位置置放﹐並在成苗階段﹐自動地自任意地點取出﹐並送至作業室或上車地點。
這些具體之措施將可使整個育苗作業系統更自動化,且更節省人工。
1.軌道型運送架之應用
典型的綠化田區以長方形50mx100m的地面或面積0.5公頃為一單元進行規劃﹐這種格局較適合於機械設備之應用。
但由於設置時常須牽就原有地形﹐很難獲得較為方正的田區。
這種形狀上的變異﹐對機器之運作有甚大的影響。
綠化場之安排通常要鄰近作業室,使秧苗之運輸距離最短,以節省運送時間。
方正的地形可以採用軌道型活動式運送架﹐將苗盤運送至綠化場的任意位置。
圖20所示為利用軌道型運送架系統配合典型綠化場之配置情形。
這種軌道式運送方法係採用X-Y方向移動的原理﹐由於輸送架在空中行走﹐故一般業者名之為空中輸送機。
圖21為輸送架之剖視圖。
整個系統之優點可歸納如下﹕
1.軌道固定﹐不受天候的影響﹐均可操作。
2.可以任任意點的移動﹐使綠化場的空間能充分利用。
3.可以作自動控制﹐並加裝附屬機械如卸箱﹑取箱裝置﹐提高自動化之程度。
4.可以完全無人操作﹐並作電腦程式控制。
整套系統係由主道運送機﹑轉彎機﹑水泥軌道﹑空中運送機組成﹐搭配研發成功之自動卸取箱機構成一個完整的作業體系。
苗盤由作業室之堆積房或播種作業線送出﹐以三盤為一疊﹐沿主道運送機送至綠化場。
經轉彎機將苗盤送上空中運送架。
運送架在軌道上移動﹐其上裝設雙條式三角皮帶運送機﹐將苗盤作橫向移動。
轉彎機則固定在運送架上﹐可隨其在軌道上移動(圖20)。
此種搬運方式與輸送帶類似,不同的是將兩條平行的三角皮帶裝設於桁架上,桁架斷面呈梯型,上部寬度為48公分,下部寬度為75公分,高度為43公分。
桁架長度約為24公尺,可依照綠化場長度大小來進行多段串聯銜接,最長可銜接到百餘公尺(圖21)。
卸取箱機則利用氣壓缸配合桁架上之定位椿﹐可以在空中輸送機上前進或後退(圖22)。
每節桁架兩端具有驅動輪,以馬達同步驅動做橫向移動,驅動輪行走於水泥砌成之軌道上,軌道寬度為30公分(圖23)。
由於這種搬運系統採用桁架結構,其強度足以支撐長跨度的移動。
空中運送架總長可達120m-150m﹐依田區之長度而定。
其兩端各以支持輪跨於綠化場兩側之水泥軌道上(圖23)。
兩軌道之跨度為24-33m﹐軌道之寬度為30cm﹐以水泥砌成。
可利用兩端之馬達同步驅動﹐每公尺距離分三次移動。
新式之驅動方式則以空氣壓縮機驅動﹐在軌道上另設有相距30公分之定位桿﹐形成鏈梯狀﹐利用定位桿與氣壓缸配合﹐可以間歇使其在軌道上移動。
由於每次行進為30公分﹐故兩端軌道可以同步相互配合﹐使整個桁架兩端同時前進。
在成苗採收時﹐其過程與苗盤進場時相同﹐但順序相反。
同樣利用自動卸取箱機﹐將長成之苗盤自地上拾起﹐並送回空中運送帶﹐再送至卡車之上﹐此時可以利用上載運送機自田角處由輸送帶直接送至卡車上。
由於上車搬運時﹐係將秧苗捲成蛋捲的形狀再上卡車﹐故必須另加捲苗機﹐但仍有待進一步開發。
由於捲苗作業均以手工為主﹐相當耗費人力。
目前在國內架設這種空中輸送系統之育苗中心約有一百餘處﹐顯見其需求及優點﹐但由於所做之規格及形式不一﹐很難有一定標準。
要重新架設輸送帶路徑為其缺點。
2.空中輸送系統之分析
為瞭解空中輸送系統對綠化場配置之影響,茲比較三種不同的綠化場配置型式所需成本及入苗、出苗的作業能量﹑作業人力數﹑綠化場型式等因子下,系統的產出率﹑每人時作業能量﹑苗盤的作業時間﹑工人的利用率等。
分析之綠化場面積為10,000m2(1ha)。
在設備成本方面,長度200公尺的綠化場所需的硬體成本約為1,712,000元,較綠化場長度為100公尺所需成本約高出39.5%,長度為50公尺的綠化場約47%。
在作業能量方面,以第二種型式的綠化場作業效率最高。
但在加入成本因素的考量後,應以採用第三種b型的綠化場來規劃為佳。
空中輸送機是將兩條平行的三角皮帶裝設於桁架上,進行苗盤縱向輸送。
桁架斷面呈梯型,上部寬度為48公分,下部寬度為75公分,高度為43公分。
桁架可依照綠化場長度大小來進行多節串聯銜接。
每節桁架均設有開關,可控制所有輸送帶運轉或停止,桁架兩端具有驅動輪,以馬達同步驅動做橫向移動。
驅動輪行走於水泥砌成之軌道上,軌道寬度為30公分。
由於此種搬運系統採用X-Y方向移動的原理,因此綠化場區塊需呈長方型或正方型,作業時方能涵蓋整個綠化場。
而空中輸送機可採用橫向與縱向的設置方式,不同的設置方式所需的設置成本就不同。
本研究定義R值來表示所設置空中輸送機的型式,R值即為綠化場的長寬比。
當R大於1時,則綠化場屬縱向的長方形,桁架的長度大於所需鋪設的軌道長度。
當R小於1時,綠化場屬橫向的長方形。
若R等於1時,則綠化場屬正方形。
Wg:
綠化場寬度
Lg:
綠化場長度
圖6-6為空中輸送機搬運系統的整體架構圖。
整個搬運系統具備有四條輸送帶,說明如下:
1.輸送帶A(conveyorA):
佈置於苗盤存放區內,長度為LCA。
2.輸送帶B(conveyorB):
連結苗盤存放區與綠化場間,長度為LCB。
3.輸送帶C(conveyorC):
橫置於綠化場前端,與綠化場同寬。
輸送帶C為連結輸送帶B和輸送帶D,長度(LCC)會隨著作業排的變換而改變。
4.輸送帶D(conveyorD):
空中輸送機桁架內的輸送帶。
LCD為輸送帶D前端到作業區位的長度,其值會隨著作業區塊的變換而改變。
圖6-6.空中輸送機的整體架構
5.輸送帶E(conveyorE):
為一傾斜輸送帶。
出苗時,將苗運送到卡車上,長度為LCE。
入苗和出苗作業時,先將空中輸送機移至作業區位,並架設好轉彎機,即可開始進行作業。
一次可數畦同時作業,稱為“作業排”,每個作業排完成作業後,再橫向移動空中輸送機,進行另一作業排的作業。
每節桁架長度的作業排稱為“作業區塊”,一個作業排通常包含數個作業區塊。
圖6-7為搬運系統相關因子的配置。
綠化場的作業排數目(Nor)和每排的作業區塊數目(Nobpr)計算如下:
Nor:
作業排數目
Nlpo:
每排之畦數
Nwpl:
每畦之掙寬度
Glps:
空中輸送機每節長度
圖6-7.搬運系統相關因子的配置圖
入苗作業
入苗作業時,需要搬運及排盤工人。
作業時,搬運工人將苗盤從苗盤存放區搬上輸送帶A,每三個苗盤為一疊。
苗盤經由輸送帶A﹑B﹑C﹑D而運送到綠化場時,排盤工人將苗盤從輸送帶D上搬下排放於田間,完成苗盤的入苗工作。
入苗作業流程如圖3所示。
當一作業排完成入苗後,排盤工人需操控空中輸送機至下一作業排。
出苗作業
出苗作業時,需要捲苗、搬運和堆疊工人。
捲苗工人將成苗捲成蛋捲般的形狀,並將三個捲苗放置於一苗盤上,以利搬運。
搬運工人將捲苗搬上輸送帶D,經由輸送帶D運送出綠化場。
依綠化場的型式不同,有的綠化場的輸送帶D與輸送帶E直接連接,而將捲苗運送上卡車。
有的綠化場需經由輸送帶C連結輸送帶E而運送到貨卡車上。
堆疊工人則在貨卡車上,將輸送帶E運送過來的捲苗,堆疊於車上。
堆疊工人在當一作業排完成後,需操控空中輸送機移至下一作業排,並在貨卡車堆滿時,需進行換車工作。
在作業換排時,需移動貨卡車至下一作業排的位置。
圖4為出苗作業流程圖。
圖6-8.入苗作業之流程圖
圖6-9.入苗作業之流程圖
模式建立
通常使用ARENA電腦模擬系統可以建構搬運模擬模式,以瞭解整個系統之實際運作。
ARENA是以SIMANV和CINEMAV為基礎發展而成的,它提供了內部圖形環境來供使用者架構SIMANV和CINEMAV(Pegdenetal.,1995)。
CINEMAV可配合SIMANV模擬語言來進行動畫模擬,可以很方便的在螢幕上觀察出模擬的進行,便利我們進行程式偵錯。
SIMANV為一電腦模擬專業語言,它除了具備有一般模擬語言的功能外,尚提供了許多有用的子模式(submodel),諸如搬運車、輸送帶等搬運工具的子模式。
而輸送帶子模式的功能,正適切符合本研究所需,該子模式具有累積式和非累積式輸送帶。
累積式輸送帶在前方運送物件停止移動時,可允許後方的運送物件(entity)在輸送帶上滑動,直到與前面物件接觸時才會停止,如動力滾子式輸送帶(poweredrollerconveyor)。
非累積式輸送帶則不會有上述的滑動現象,箕式輸送帶(bucketconveyor)和帶式輸送帶(beltconveyor)即為此種型式。
因空中輸送機搬運系統使用三角皮帶式的輸送帶,故本研究採用非累積式輸送帶。
輸送帶子模式在模擬時還可針對輸送帶各種狀態進行監視,如輸送帶上的苗盤數、輸送帶運轉狀態和輸送帶運轉速度等,因此使用該模擬語言可節省模擬程式撰寫時間與困難度。
資料之擷取
由於入苗和出苗作業都是以三個苗盤為作業單位,因此作業時間以三盤為一計測單位。
在作業時間的計算方面,Fang和Giacomelli(1993)在溫室物流系統最佳化設計研究中,定義每個搬運作業循環時間需包括工人搬運來回行走時間和作業時間(RelocationTime;RT)。
該計算法則可應用在入苗的排盤作業和出苗的搬運作業的時間計算。
來回行走時間係量測工人的平均行走距離(ATD)除以工人平均行走速度(STL)計算而得,工人的平均行速度以1m/sec來計算。
而工人平均所行走距離與作業排寬度有關。
搬運作業循環時間(TCT)計算如下:
空中輸送機換排作業時間可將其分為輸送機移動時間與工人作業時間等二項。
輸送機換排的移動距離為一作業排的寬度,輸送機之移動速度為0.08m/sec。
入苗作業時,僅需架設轉接機。
在出苗作業之換排或換卡車時,必需操作調整輸送帶E,方能移動空中輸送機,故入苗和出苗之換排作業時間也就不同。
每個單元的作業時間之觀測係在育苗中心進行現場實測,以錄影帶拍攝作業過程,並利用馬錶計測各作業單元所需的作業時間。
將量測的數據整理後,利用UnifitII軟體(LawandVincent,1991)求得最適配之作業時間分佈函數。
該分析軟體可找出數種配適之分佈函數,並依合適度做一名次排列。
以MLE(maximumlikelihoodestimation)法來計算分佈函數之參數,γ為位置參數﹑β為尺度參數﹑α為形狀參數。
配適之分佈函數並利用Chi-Squaretest和Anderson-Darlingtest來進行合適性檢驗。
經由合適性檢驗結果得知,配適之分佈函數除了入苗時苗盤搬上輸送帶A的作業時間,其棄域的α值在0.01的水準下,其它的作業時間分佈函數的棄域α值都至少在0.1的水準,不會被捨棄(donotreject)。
因此所有單元的作業時間所配適的分佈函數,可以被接受。
各作業單元的觀測次數﹑平均值﹑標準差﹑配適之分佈函數﹑合適性檢驗結果等如表1所示。
分佈函數的配適結果顯示:
在出苗中包括捲苗﹑捲苗堆疊在卡車上﹑移動卡車及入苗中苗盤從苗盤存放區搬上輸送帶等作業為魏寶分配(Weibulldistribution)。
對於空中輸送機移動的調整時間﹑出苗中的捲苗搬上空中輸送機和入苗的排盤等作業,最適的配適分佈函數為珈瑪分佈。
出苗時,操作調整輸送帶E使捲苗能運送到卡車上方,其作業時間呈常態分佈(Normaldistribution)。
表6-1最適之分佈函數之參數及數值
作業名稱
觀測次數
平均
(sec)
標準差
(sec)
最適之
分佈函數
函數之參數
γ,β,α
χ2
Pvalue
A-Dtest
苗盤搬上輸送帶A
86
3.78
0.85
Weibull
0,4.1,4.9
0.075
0.01
排盤作業
93
8.25
1.9
Gamma
0,0.4,18.8
0.17
0.25
捲苗作業
77
11.18
2.47
Weibull
7.9,3.6,1.3
0.1
0.25
捲苗搬上輸送帶D
81
5.17
1.63
Gamma
0,0.5,10.3
0.29
0.25
捲苗堆疊於卡車
93
5.51
1.1
Weibull
0,6,5.8
0.61
0.25
輸送帶E調整時間
28
27.36
9.4
Normal
27.4,9.4,0
0.74
0.25
輸送機調整時間
36
17.17
12.4
Gamma
7,16.1,0.6
0.31
0.25
移動卡車時間
23
57.46
28.6
Weibull
33,21.4,0.8
0.44
0.25
分佈參數γ:
位置參數,β:
尺度參數,α:
形狀參數
模式之確認
為了確保發展之模擬模式能精確描述實際系統的運作情形,本研究選擇了四個綠化場來做為模式的驗證。
farmA年產量為250,000箱,farmB為350,000箱,farmC為129,000箱,farmD為71,000箱。
入苗作業之確認
在入苗模式的驗證中,實際觀測四場的每小時作業能量與模擬值進行比較。
入苗作業模式驗證的重要輸入參數如表2所示。
模擬值的產生係重複執行模式10次來求得平均值﹑標準偏差及作業能量的範圍值。
觀測值的產生係實際觀測整個作業完成所需的時間,再換算成每人時的作業箱數。
從表3中得知,模擬與觀測值兩者之間差異性不大。
差異最小為農場C,模擬值為452.9盤/人-時,實際觀測值為437.1盤/人-時,差異僅約3.5%。
差異最大的農場B,也僅有6.5%的差異性,模擬結果相當接近。
為了更進一步驗證模式的準確性,本研究針對農場A和農場C,再進一步比較苗盤搬上工人的利用率﹑排盤工人的利用率和輸送帶A上的平均苗盤數,做為模式驗證。
輸送帶上的平均苗盤數係以每隔5分鐘觀測一次輸送帶上的苗盤數,並計算其平均做為觀測值,來與模擬產生進行比較。
工人利用率之觀測,係以每5分鐘為一計測單位,量測工人在計算單位時間內,實際作業的時間,以連續取樣方式進行觀測,並求其平均做為觀測值。
由表3中得知,對於苗盤搬上工人的利用率模擬與實際值相差不大,約僅4%的差異,概因搬上工人的工作較為規律且單純。
但對排盤工人的利用率來說,在農場C的驗證就稍大,大約有14.9%,究其原因可能為該場的排盤工人作業較純熟﹑快速。
但整體來說,發展之入苗模擬模式,可精確描述實際系統的運作情形。
表6-2.入苗作業之參數值
農戶A
農戶B
農戶C
農戶D
觀測苗盤數(盤)
1815
4047
1809
1251
Lg(m)
135
50
90.4
26.4
Wg(m)
80
100
63.5
120
輸送帶速度(m/sec)
0.3
0.3
0.3
0.3
LCA(m)
5
6
6
6
LCB(m)
32.5
15
24
51
LCC(m)
60
20.5
47.5
2.5
LCD(m)
117.5
12.5
56.5
7
作業區塊數
1
2
1
1
作業排長度(m)
33.5
50
22.5
13.5
作業寬度(m)
4
4.5
7
3
每個區塊苗盤數(盤)
363
456
627
180
搬上工人數
2
1
1
1
排盤工人數
4
3
3
4
註:
表列之LCC和LCD為開始作業區塊之長度。
表3.入苗作業之模式分析結果
FarmA
FarmB
FarmC
FarmD
作業量
tray/man-hr
觀察平均值
336.1
528.9
437.1
324.2
模擬值
mean
std.dev.
Range
355
7.3
343.5-366.3
495.9
3.5
489.7-499.6
452.9
0.8
451.8-454.3
338.7
5.1
331.7-346.8
差異(%)
5.6
6.5
3.5
4.5
URof搬上工人
觀察平均值
39.2
----
65.9
----
模擬值
mean
std.dev.
Range
37.4
0.83
36.3-38.7
69.8
0.54
68.9-70.4
63.7
0.33
63.1-64.1
59.3
0.81
58.2-60.4
差異(%)
4.5
----
3.5
----
URof排盤工人
觀察平均值
63.6
----
59.9
----
模擬值
mean
std.dev.
Range
68.5
0.8
67.7-70.2
64
0.31
63.6-64.5
68.8
0.35
68.4-69.6
44.4
0.38
43.8-45
差異(%)
7.7
----
14.9
----
No.oftrayonconveyorA
觀察平均值
4.82
----
3.27
----
模擬值
mean
std.dev.
Range
4.98
0.09
4.8-5.1
4.08
0.02
4.05-4.1
3.65
0.03
3.61-3.69
3.68
0.06
3.59-3.78
差異(%)
3.3
----
11.6
----
Timeinsystem(sec)
模擬值
mean
std.dev.
Range
1077.4
27.8
1035.6-1121
295.3
1.89
292.6-298.7
530.95
1.78
529.4-535.7
324.38
4.61
318.6-332.1
No.oftrayonconveyorD
模擬值
mean
std.dev.
Range
113.4
1.3
111.5-115.4
17.0
0.08
16.8-17.1
34.1
0.1
33.9-34.3
4.3
0.04
4.3-4.4
出苗作業之確認
出苗作業模式亦在上述四個農場進行驗證。
出苗模式的重要輸入參數如表4所示。
由於農場A和農場C的綠化場屬於長條形,在綠化場的頭地一側為農路。
因此該兩場出苗時,利用輸送帶D直接連接輸送帶E將捲苗運送上卡車進行堆疊,因此出苗時不需經由輸送帶C來運送。
出苗作業的驗證結果如表5所示。
從表5中得知,農場A﹑農場B和農場D的作業能量,其模擬與觀測值兩者之間差異性不大,都在8.7%以內。
但農場C的作業能量實際觀測值為199.1盤/人-時,模擬值則為171.4盤/人-時,實際觀測值較模擬值大16.2%,誤差較大。
因此針對捲苗搬上工人的利用率﹑堆疊工人的利用率和輸送帶E上的平均苗盤數,做一驗證,確認模式的準確性。
由表5中得知,對於捲苗搬上工人利用率其模擬與觀測值差異性都在8.3%以內,堆疊工人利用率則在11.7%以內,兩者數值都相當接近。
對於輸送帶E上的平均苗盤數來說,模擬與觀測值的平均苗盤數差異都在一盤以內,因此出苗的模擬模式可以廣泛的應用在空中輸送機的作業模式。
表6-4.出苗作業之參數值
FarmA
FarmB
FarmC
FarmD
觀測苗盤數(盤)
648
1518
1566
1116
LCC(m)
----
43.5
----
96
LCD(m)
5
25
79
13.2
LCE(m)
6
6
6
6
作業區塊數
1
2
1
1
作業排長度(m)
10
50
22.5
26.5
作業寬度(m)
4
2.28
2.4
4.5
每個區塊苗盤數(盤)
132
228
210
495
捲苗工人數
3
2
3


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 绿化 搬运 机具
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 铝散热器项目年度预算报告.docx
铝散热器项目年度预算报告.docx
-
牛津上海版通用小学英语三年级上册Unit 12同步练习2II 卷.docx
-
论我国私营企业员工激励机制.docx
-
人教版五年级品德与社会上册全册教案.docx
-
开学啦国旗下讲话稿三分钟.docx
-
露天采矿学复习题.docx
-
六年级英语教师年度考核个人总结.docx
-
某路站综合体项PC吊装施工方案.docx
-
人教版九年级历史上册期末考试试题一套.docx
-
隆昌妇幼保健院.docx
-
芦二矿抽采达标中长期规划.docx
-
看拼音写词语.docx
-
模拟磁盘调度算法系统的设计毕业设计.docx
-
每周一条名言警句或一首诗词.docx
-
棉花膜下滴灌示范工程设计总结报告.docx
-
九年级化学教案第十单元酸和碱教案新人教版.docx
-
宁波市水资源公报.docx
-
农业实用技术培训工作意见与农业局上半年工作总结范例两篇汇编.docx
-
平行线的判定.docx
-
内部会计管理制度11成本核算制度.docx
-
盘扣式脚手架支撑方案.docx
-
旅游规划模板.docx
-
煤矿大本大专毕业设计大采高综采工作面作业规程.docx
-
美学选择题整理课件资料.docx
-
名家论腹泻慢性肠炎.docx
-
宁夏银川市第一中学学年高一上学期期中考试地理试题解析解析版.docx
-
年产吨精密纤维纸项目建设建议书.docx
-
农技推广中心工作总结.docx
-
彭宇案的法逻辑批判.docx
-
宁夏仕奇房产网发布份房地产交易情况.docx
-
项目推荐书智能温控节能系统.docx
-
区县节日期间加强消防安全讲话稿与区发改委领导班子述职述廉报告汇编.docx
 德国玺堡公司介绍+(1)优质PPT.ppt
德国玺堡公司介绍+(1)优质PPT.ppt
-
微笑服务礼仪培训课件PPT文件格式下载.pptPPT文件格式下载.ppt
-
马克思主义基本原理概论第三章课件PPT资料.ppt
-
心灵捕手优质PPT.pptx
-
马克思主义基本原理概论第一章课件pptPPT资料.ppt
-
心中那盏灯PPT格式课件下载.ppt
-
心房颤动伴长间歇PPT课件下载推荐.ppt
-
心态决定命运PPT文档格式.ppt
-
心理健康教育六上《友谊之花》PPT推荐.ppt
-
马克思主义基本原理概论第五章第一、第二节PPT格式课件下载.ppt
-
马克思主义基本原理概论课件第四章优质PPT.ppt
-
心电图中一些新名词PPT文件格式下载.ppt
-
心电除颤PPTPPT文档格式.ppt
-
心理健康PPtPPT文件格式下载.ppt
-
马克思主义基本原理概论绪论课件pptPPT格式课件下载.ppt
-
马克思主义基本原理概论第三章课件pptPPT文档格式.ppt
-
心理健康教育《做最好的自己》PPT资料.ppt
-
忘我献身的法国公民PPT资料.ppt
-
马克思主义文艺理论PPT文件格式下载.ppt
