 前向感知模块.docx
前向感知模块.docx
- 文档编号:9456067
- 上传时间:2023-02-04
- 格式:DOCX
- 页数:19
- 大小:425.99KB
前向感知模块.docx
《前向感知模块.docx》由会员分享,可在线阅读,更多相关《前向感知模块.docx(19页珍藏版)》请在冰豆网上搜索。
前向感知模块
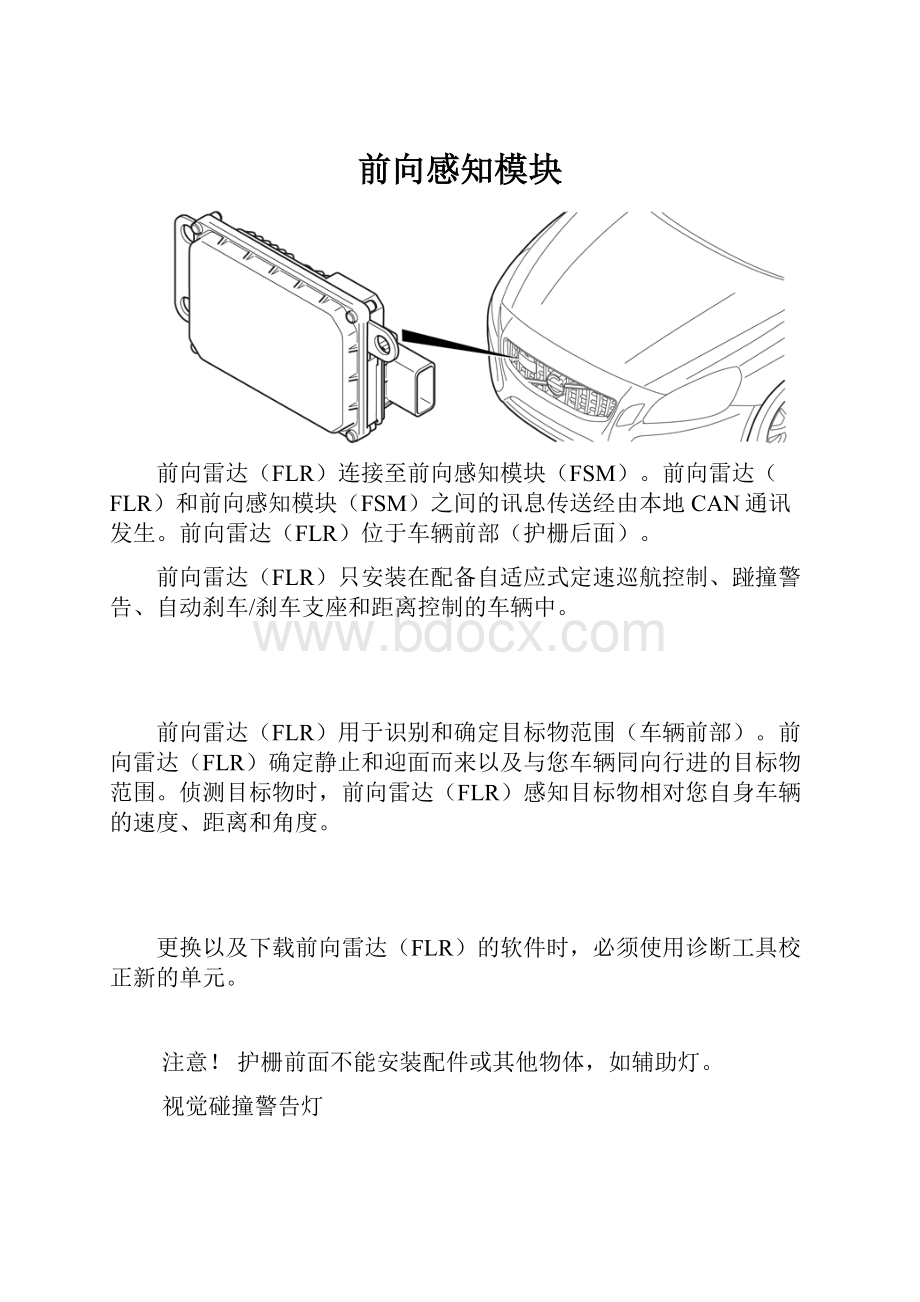
前向雷达(FLR)连接至前向感知模块(FSM)。
前向雷达(FLR)和前向感知模块(FSM)之间的讯息传送经由本地CAN通讯发生。
前向雷达(FLR)位于车辆前部(护栅后面)。
前向雷达(FLR)只安装在配备自适应式定速巡航控制、踫撞警告、自动刹车/刹车支座和距离控制的车辆中。
前向雷达(FLR)用于识别和确定目标物范围(车辆前部)。
前向雷达(FLR)确定静止和迎面而来以及与您车辆同向行进的目标物范围。
侦测目标物时,前向雷达(FLR)感知目标物相对您自身车辆的速度、距离和角度。
更换以及下载前向雷达(FLR)的软件时,必须使用诊断工具校正新的单元。
注意!
护栅前面不能安装配件或其他物体,如辅助灯。
视觉碰撞警告灯
视觉碰撞警告灯包括12盏发光二极管,分为三组。
这些发光二极管直接连接到前向感知模块(FSM)。
指示灯用于在视觉上向驾驶员示警,即将发生踫撞,以便减少或预防踫撞的危险。
指示灯也用于在与前方车辆的时间间隔小于设定的间隔时,在视觉上通知驾驶员。
视觉碰撞警告指示灯位于驾驶员侧仪表板的上边。
前向感知模块(FSM)通过脉冲宽带调谐来控制视觉碰撞警告灯的光强度。
三组发光二极管分别连接到前向感知模块(FSM),这就意味着前向感知模块(FSM)可以对每一组发光二极管进行个别调控。
指示灯有一个内部温度传感器。
温度传感器的任务是保护电子元件。
在温度超过100°C/212°F时,即使前向感知模块(FSM)要求,指示灯也不会点亮液晶体显示灯(LED)。
在出现这种情况时,前向感知模块(FSM)还会再阻止指示灯亮起10分钟。
注意!
强烈的日照等因素造成乘客车厢温度升高时,可能令视觉警告信号暂时出现故障。
出现这种情况时,报警声音将启动,即使它已在功能表系统中被关闭。
前向相机
前向相机是一台与前向感知模块(FSM)相连的感测器。
信息以类比视频信号的形式,从相机传送到前向感知模块(FSM)。
相机位于挡风玻璃里面的上沿,靠近后视镜。
前向相机用于向控制模块提供有关静止和移动物体的信息,并识别和测量路线。
为了防止相机前面的挡风玻璃上形成冷凝物,有一个经由控制模块控制的加热元件。
更换前向摄影机或前向感知模块(FSM)时,必须使用诊断工具校正新的单元。
在设定了故障代码FSM-500154后,为控制模块下载软件时,也必须校正。
注意!
相机与人眼类似,都有一定限制,即它在阴暗中、大雪或大雨中和浓雾中“视力”会变弱。
在此情况下,一些依赖于相机的功能会被严重削弱或暂时关闭。
当相机被用于读取车道并探测行人和其他车辆时,强背光、路面反光、雪或冰面车道、路面脏污或路标模糊都可能削弱相机功能。
高温时,发动机会开始保护相机功能,相机将随后暂时关闭约15分钟。
注意!
如果显示器出现“挡风玻璃感测器被覆盖”的讯息,即表示相机感测器被遮盖,无法探测车辆前方的行人、车辆或路标。
功能
自适应定速巡航控制的控制
自适应定速巡航控制的控制
功能
注意!
关闭速度模块(CVM)(4/125)只有S60、V60、与XC60可配备。
自适应式定速巡航控制的功能是现有定速巡航控制的扩充。
如果前面没有车辆,对于传统定速巡航控制,速度将保持不变。
速度由驾驶员采用与传统定速巡航控制相类似的方式设定。
如果前方有一辆车的行驶速度低于设定速度,速度自身将自动调整,以便获得所设定的与前方车辆的时间间隙。
这种情况下,前向感知模块(FSM)的自适应式定速巡航控制对发动机控制模块(ECM)进行控制,必要情况下,也将控制刹车控制模块(BCM)保持着设定的时间间隙。
与前方车辆的时间间隔可由驾驶员设定为1至2.5秒五个间隔级数。
系统启动时,使用自前一个驾驶周期以来最后选取的间隔。
若要变更间隔设定,驾驶员按动方向盘开关,左(SWSL)上的一个按钮,增加或减少间隔。
方向盘开关,左(SWSL)经由LIN通信向中央电子模块(CEM)(4/56)传输信息,表明启动的按钮。
中央电子模块(CEM)经由CAN网络将这一信息转发至前向感知模块(FSM)(4/80)。
在手动变速箱的车辆上,自适应式定速巡航控制功能仅限车速在约30km/小时以上时使用。
含自排变速箱的S60(11-)、V60、以及XC60(X60自结构周201046)可以自适应车速在30km/小时以下的前方车辆。
如果前方车辆停止,自适应式定速巡航控制将停下汽车,并使用行车刹车令汽车保持静止。
若要在车速低于30km/小时时启动定速巡航控制,前方车辆需在合理距离内。
请注意,定速巡航控制的最低可编程速度为30km/小时;即使定速巡航控制可令车辆跟随另一辆车减速至静止,也不能选择更低的车速。
行车刹车只可令车辆至多静止120秒,随后驻车刹车自动接过保持车辆静止的责任。
当自适应式定速巡航控制令汽车跟随另一辆车停止,并且驾驶员车门打开、座椅安全带解开、发动机关闭或出现系统故障时,驻车刹车也将自动启动。
如果前方车辆驶离,且自身汽车的静止时间不到3秒,自适应式定速巡航控制将自动启动。
但如果您的汽车已静止超过3秒,驾驶员必须再次启动自适应式定速巡航控制,以跟随其他车辆。
再次启动可通过按下恢复按钮或轻触油门踏板来完成。
定速巡航控制因驾驶员的某些操作而暂时解除:
使用行车刹车
踩下离合器踏板的时间超过1分钟
移动排档杆至空档位置(自动变速箱)
驾驶员保持车速高于设定速度的时间超过1分钟
随后驾驶员应控制车速。
踩下油门踏板令车速暂时增加,如超车,并不影响定速巡航控制的设定。
汽车会在油门踏板松开后恢复到最新储存的速度。
自适应式定速巡航控制功能依赖于车辆其他系统。
如果某个系统停止工作,定速巡航控制也将自动关闭。
该功能自动解除后,车辆将发出信号声音并显示“定速巡航控制解除”的讯息。
随后驾驶员需采取措施,调整与前方车辆的速度和距离。
功能自动解除可能由于:
发动机转速过低/过高
速度低于30km/小时(不适用于含自排变速箱的S60、V60、或XC60(X60自结构周201046))
车轮失去阻力
刹车温度高
前向雷达(FLR)被覆盖,如湿雪或下大雨(雷达波被阻)。
注意!
若要启动自适应式定速巡航控制,驾驶员必须关闭车门,扣上座椅安全带,然后至少踩下一次油门踏板或者刹车踏板。
通过这种方式,确保在允许启动前,驾驶员位于汽车内。
注意!
驾驶员需一直关注交通状况,并应在自适应式定速巡航控制未保持适当的车速或适当的距离时采取措施。
注意!
自适应式定速巡航控制不是避碰系统。
驾驶员必须在系统未探测到前方车轮时采取措施。
控制定速巡航控制功能
请参阅:
设计与功能-发动机控制模块(ECM)。
自动刹车和刹车支座
自动刹车和刹车支座
刹车支座在发生碰撞危险时发挥作用,其设计在有碰撞危险时,帮助驾驶员快速有效地从车辆获得必要的刹车效果。
自动刹车功能可在车辆即将与前方行人或车辆发生碰撞且驾驶员未及时刹车和/或靠边时,自动刹车。
自动刹车功能可防止碰撞,或将车速降至35km/小时以下,从而降低碰撞力。
自动刹车功能在车速不低于4km/小时时启动。
车辆配备有一个前向感知模块(FSM)(4/80),此模块在后视镜安装有一个前向摄影机(27/5)。
在某些车辆中,前面(护栅的后面)也安装有一个前向雷达(FLR)(7/203)。
前向雷达(FLR)只安装在配备自适应式定速巡航控制、踫撞警告、自动刹车/刹车支座和距离控制的车辆中。
前向雷达(FLR)测量其视野范围内,与前方车辆的距离和速度。
前向相机可对视野内的目标物进行分类。
前向感知模块(FSM)使用前向雷达(FLR)发出的信息,评估与车辆同向移动或静止的前方车辆或行人发生碰撞的危险。
前向感知模块(FSM)使用碰撞威胁的评估以及对驾驶员即将采取的措施的评估,向驾驶员发出一个警告。
如果驾驶员没有反应,刹车支座功能将被启动,随后将自动刹车。
带自动刹车的碰撞警告被设计为尽可能晚的启动,以避免不必要的操作。
碰撞警告与城市安全系统互补。
有关城市安全的更多信息,请参阅:
设计与功能-关闭速度模块(CVM)。
在即将发生碰撞情形下,前向感知模块(FSM)可以做出下列动作:
1.声音信号和/或可视警告(请参阅碰撞警告)。
2.在驾驶员踩下刹车踏板之前,施加低级别的自我控制刹车作用力。
3.减小达到车辆的完全刹车能力所要求的作用力。
4.自动刹车减少踫撞速度。
对该功能要求的效果是在有与前方车辆或行人发生碰撞危险时,针对驾驶状况最大程度地增加刹车效果。
刹车系统通过增加刹车扭矩以获得最大的效率。
这减少了总刹车距离,而不会对驾驶员、乘客或车辆的表现有负面影响。
在可能发生碰撞的情形下,刹车辅助功能触发刹车,以使刹车系统的滞后降到最低,并增加驾驶员刹车的能力。
为了启动刹车、刹车支座或自动刹车,前向感知模块(FSM)与刹车控制模块(BCM)(4/16)通信,后者转而启动液压装置。
该功能的主要组件是液压调谐器,它整合在刹车控制模块(BCM)中。
液压调谐器的主要功能是根据控制信号,建立要求的刹车压力。
液压调谐器是一个电子机械式组件,它从刹车控制模块(BCM)接收控制信号。
刹车控制模块(BCM)根据驾驶员的动作、车速和前向感知模块(FSM)发来的信息,向液压调谐器提供足够的控制信号。
液压调谐器为每个车轮达到想要的刹车压力/刹车扭矩,根据的是使用必要信息而设定的要求刹车效果。
前向感知模块(FSM)除为了能够控制液压调谐器之外,还要求从刹车控制模块(BCM)发来信息。
前向感知模块(FSM)所要求的信息:
●停车灯开关
●刹车踏板位置开关
●速度
●计算刹车作用力。
若需更多有关刹车控制模块(BCM)的信息,请参阅“设计与功能,刹车控制模块(BCM)”。
如果人体的较大部位对于相机不可视,则系统无法探测到行人。
这表示系统必须能够识别人体头、臂、肩、腿、上身和下身以及正常的人体动作方式。
●要启动行人探测功能,行人必须完全可视并至少80cm高。
●系统无法探测到携带较大物体的行人。
●与人眼类似,相机在傍晚和黎明探测行人的能力受限。
●车辆在黑暗和隧道中行驶时,即使已开启路灯,相机探测行人的能力也将关闭。
注意!
针对行人的碰撞警告和自动刹车功能在车速超过80km/小时时关闭。
注意!
相机探测行人的范围有限,因此系统只能在车速低于50km/小时时发出有效的碰撞警告和自动刹车。
对于静止或低速行驶的车辆,碰撞警告和自动刹车在车速低于70km/小时时有效。
小心!
尚无自动控制系统可在所有情况下保证功能100%正确。
因此,绝不可对人进行自动刹车系统测试,这可能致人重伤和危及生命。
碰撞警告
碰撞警告
碰撞警告功能设计在极有可能与前方的车辆或者人员有发生碰撞时,发出警告。
碰撞报警器警告同向行驶的车辆以及静止车辆。
在有高度碰撞危险时,碰撞报警器警告横过车辆或沿着车辆方向行走的人员。
碰撞警告功能根据前方人员或车辆的速度和方向以及您自身车辆的速度和方向计算启动报警的时间。
在计算中,对于大约85%驾驶员的正常反应时间和系统反应时间有一个补偿。
如果报警距离大于测得的与前方车辆之间的距离,且驾驶员没有采取任何措施,将启动一个碰撞警告。
为了确保警告生效,和驾驶员有反应时间,初始的距离切勿小于体能上停止车辆/避免碰撞的距离。
碰撞警告由灯光和声音二者构成。
通过信息娱乐控制模块(ICM)(3/281)中的功能表系统,可以设定三个报警距离。
该设定值控制启动报警的时间。
在同一功能表中,驾驶员也可以开启和关闭该功能和报警声音。
日本市场的车型无法关闭碰撞警告功能。
视觉警告是通过视觉警告灯(27/2)的方式产生的,而声音警告是通过驾驶员信息模块(DIM)(5/1)产生的。
前向感知模块(FSM)(4/80)经由CAN向驾驶员信息模块(DIM)发送一个请求而产生声音警告。
前向感知模块(FSM)还向信息娱乐控制模块(ICM)(3/281)发出一个请求,要求在驾驶员信息模块(DIM)发出声音警告期间降低至喇叭的声音(立体声)。
碰撞警告功能将启动报警,确保所有驾驶员中大约85%有机会停车、靠边或者减轻与满足上述标准的车辆或人员的碰撞后果。
注意!
强烈的日照等因素造成乘客车厢温度升高时,可能令视觉警告信号暂时出现故障。
出现这种情况时,报警声音将启动,即使它已在功能表系统中被关闭。
距离控制
距离控制
距离控制功能可以通知与前方车辆的时间间隔。
如果时间间隔低于设定的距离,驾驶员通过挡风玻璃中连续闪烁的灯光得到这一信息。
灯光是由可视踫撞警告指示灯(27/2)产生的。
距离控制以从前向雷达(FLR)得到的目标物资料为基础。
该功能由位于中央控制台中的距离控制开关或信息娱乐控制模块(ICM)(3/281)中的功能表系统进行启动。
时间间隔及其设定与自适应式定速巡航控制相同,并使用方向盘上的箭头按钮实施。
只有自适应式定速巡航控制处于关闭或待机模式时,才可以启动距离控制。
距离控制功能可以在速度超过30公里/小时的情况下启动。
LaneDepartureWarning
LaneDepartureWarning
LaneDepartureWarning(车道偏离警告)功能设计在车辆即将不经意离开车道时,发出警告。
LaneDepartureWarning(车道偏离警告)根据车辆相对车道标志的位置,计算启动警告的时间。
系统包含一台读取车道路标的相机(27/5)。
车辆在没有使用转向指示灯的情况下穿过车道路标时,驾驶员会得到声音信号发出的警告。
只有车道两侧有路标,且车辆没有执行放大操控时发出警告。
声音警告是通过驾驶员信息模块(DIM)(5/1)产生的。
前向感知模块(FSM)(4/80)经由CAN向驾驶员信息模块(DIM)发送一个请求而产生声音警告。
前向感知模块(FSM)还向信息娱乐控制模块(ICM)(3/281)发出一个请求,要求在驾驶员信息模块(DIM)发出声音警告期间对喇叭的立体声实行静音。
LaneDepartureWarning的开关位于中控台中。
DriverAlertControl
DriverAlertControl
DriverAlertControl功能设计在感测到突然转向的驾驶行为时,引起驾驶员的注意,例如驾驶员精力不集中,或者昏昏欲睡时。
前向相机(27/5)读取车道油漆的路标,并将道路的延伸与驾驶员方向盘的动作相比较。
在车辆没有继续沿着车道行驶时,驾驶员会得到声音信号和文字讯息的警告。
声音警告是通过驾驶员信息模块(DIM)(5/1)产生的。
前向感知模块(FSM)(4/80)经由CAN向驾驶员信息模块(DIM)发送一个请求而产生声音警告。
前向感知模块(FSM)还向信息娱乐控制模块(ICM)(3/281)发出一个请求,要求在驾驶员信息模块(DIM)发出声音警告期间对喇叭的立体声实行静音。
系统概观
简介
前向感知模块(FSM)是一个电子系统,可以:
警告和帮助驾驶员在即将发生踫撞时刹车
在驾驶员即将离开车道时,向他/她发出警告
在驾驶员的驾驶方式发生不良变化时,向他/她发出警告。
系统的零件也会补充现有的定速巡航控制。
前向感知模块(FSM)提供下列功能:
●碰撞警告。
●警告驾驶员,有可能与前方车辆或人员相撞。
●自动刹车
●在碰撞即将发生时,自动刹车。
●刹车支撑
●在有踫撞危险时,帮助驾驶员在踩下刹车踏板时刹车。
●距离控制
●帮助驾驶员保持与前方车辆的距离,而不影响自身车辆的速度。
挡风玻璃的灯光持续亮起显示与前方车辆的时间间隔低于设定的距离。
●自适应式定速巡航控制
●在定速巡航控制启动时,与前方的车辆保持一个时间距离。
●LaneDepartureWarning
●如果驾驶员无意识地即将离开车道时,会向驾驶员发出警告。
●DriverAlertControl
●警告驾驶员,他们的注意力不集中导致驾驶方式恶化,例如,因为疲惫。
●控制模块
●前向感知模块(FSM)的最重要的任务是管理以下功能:
●碰撞警告
●自动刹车(如果发生不可避免的踫撞)
●刹车支座(如果有踫撞危险)
●距离控制
●自适应式定速巡航控制
●LaneDepartureWarning
●DriverAlertControl
控制模块位于踏板组件附近的面板后面。
更换时,从车辆拆下整个控制模块。
前向感知模块(FSM)既与直接连接组件又与其他控制模块经由CAN通讯进行通讯。
控制模块利用一个整体式诊断系统来检查启动以及输入和输出信号。
如果控制模块探测到故障,就会储存诊断故障代码。
在某些情况下,控制模块会用一个代用值来取代这个故障信号。
所有诊断故障代码(DTC)均储存在相关的控制模块内存中。
使用诊断工具可以读取这些资料。
如果控制模块侦测到故障,则会有一诊断故障代码登记于控制模块内部内存中。
同时一些数值也会被储存。
这些数值在故障发生时冻结。
取决于故障的严重程度,一些功能可能部分或完全解除。
诊断故障代码和冻结值(延伸的诊断故障代码信息)可经由车辆的资料连结连接器使用诊断工具读出。
有关进一步信息,还请参阅信号规格。
信号
下表总结了进出前向感知模块(FSM)的输入和输出信号。
信号类型分为直接连接信号、串联通讯和控制区域网络(CAN)通讯。
下面的例图显示了带Volvo组件名称的相同信息。
输入信号
输出信号
直接连接的:
直接连接的:
▪前向相机(27/5)
▪视觉碰撞警告灯(27/2)
经由局部CAN通讯:
经由局部CAN通讯:
▪前向雷达(FLR)(7/203)
▪前向雷达(FLR)(7/203)
经过控制区域网络(CAN)通讯:
经过控制区域网络(CAN)通讯:
▪中央电子模块(CEM)(4/56):
∙方向盘开关,左(SWSL)
∙停车灯开关
∙驻车刹车开关
∙倒车灯开关
▪刹车控制模块(BCM)(4/16):
∙速度信号
∙刹车压力开关
∙开关,刹车减力
∙刹车踏板位置开关
∙车体传感器组群稳定性传感器(BSC)
▪发动机控制模块(ECM)(4/46):
∙油门踏板信号
▪方向盘模块(SWM)(3/130)
▪信息娱乐控制模块(ICM)(3/281)
▪驾驶员信息模块(DIM)(5/1)。
▪变速箱控制模块(TCM)(4/28)
▪气候控制模块(4/6):
∙距离控制开关
∙开关LaneDepartureWarning
▪驻车刹车模块(PBM)(4/115)
▪关闭速度模块(CVM)4/125(唯XC60、S60(11-)、与V60)


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 感知 模块
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 1212中级汽车维修工考试试题三.docx
1212中级汽车维修工考试试题三.docx
-
333教育综合.docx
-
204届毕业生基础知识考试试题 混凝土结构设计 试题.docx
-
100以内加减运算练习题.docx
-
101软件开发工程师JAVA初级考试样卷课件word版本.docx
-
CNN代码理解.docx
-
CPA审计第4章审计抽样下载版讲解.docx
-
hr培训管理系统.docx
-
318安通科科长岗位责任制.docx
-
2044施工现场环境污染的防治措施.docx
-
12371党务平台操作手册.docx
-
Catia百格线生成宏复习过程.docx
-
725kV及以上电压等级支柱瓷绝缘子运行规范.docx
-
1144甑底链板机说明书.docx
-
100个著名初等数学问题.docx
-
201X中学寒假工作计划范文.docx
-
111 生物的特征 练习 人教版七年级上册生物.docx
-
110KV变电所设计变压器翻译.docx
-
9920第二学期学校工作总结.docx
-
0911二级技能解答.docx
-
33415设计说明书正文.docx
-
311教育学基础综合大纲.docx
-
201浙江普通高校招生选考科目考试地理试题和答案解析.docx
-
C语言程序的设计实验实验指导书及答案.docx
-
272相似三角形的性质和判定.docx
-
ACCAHA不稳定型心绞痛和非ST段抬高心肌梗死治疗指南修订版摘要.docx
-
baosteel标准对照 外标含量.docx
-
M1模拟练习题.docx
-
ARM体系课程设计实验报告.docx
-
Android面试题整理.docx
-
gaoer.docx
-
CPⅢ测设方案.docx
-
别墅施工组织设计施工组织设计.docx
-
糊涂戏班.docx
-
个人答谢会主持词范文三篇.docx
-
房地产基础知识培训课件范本.docx
-
办公楼给排水消防电气安装工程施工组织设计.docx
-
钢丝绳式货用施工升降机安全技术规范.docx
-
放射技士资格考试基础知识考试题.docx
-
电子商务试题答案.docx
-
法律谈判案例及答案.docx
-
《中国少年雏鹰行动》雏鹰争章实施细则之欧阳学创编.docx
-
电力售后服务承诺书4篇.docx
-
高三尖子生的地理笔记值得参考.docx
-
对爱情的人生感悟的句子大全人生感悟.docx
-
个人师德学习计划四篇.docx
-
部编版教材五年级语文上册《古人谈读书》教案表格版共2课时.docx
-
英语四级四级高频词汇.docx
 第二讲:电磁场与物质的相互作用-853108061.ppt
第二讲:电磁场与物质的相互作用-853108061.ppt
-
22#吊篮施工方案可编辑范本.docx
-
在职攻读硕士专业学位联考体育综合9.docx
