 PID控制参数调节对系统性能的影响.docx
PID控制参数调节对系统性能的影响.docx
- 文档编号:10866839
- 上传时间:2023-02-23
- 格式:DOCX
- 页数:13
- 大小:641.26KB
PID控制参数调节对系统性能的影响.docx
《PID控制参数调节对系统性能的影响.docx》由会员分享,可在线阅读,更多相关《PID控制参数调节对系统性能的影响.docx(13页珍藏版)》请在冰豆网上搜索。
PID控制参数调节对系统性能的影响
PID控制参数对系统性能的影响
1.引言
PID(比例积分微分)控制自产生以来就一直是工业生产中应用最广泛的控制方法,随着电子计算机和控制领域的发展,控制器的方案也在不断丰富,但由于
PID控制法(比例、积分、微分控制法)原理简单、适用性强和鲁棒性强等特点至今仍被广泛应用。
本文对不同的受控系统改变PID调节的各参数,采用单位阶跃响应分析法和根轨迹法对PID控制系统进行了仿真分析,旨在对PID调节进行更加深入细致研究。
2.PID控制原理仿真分析
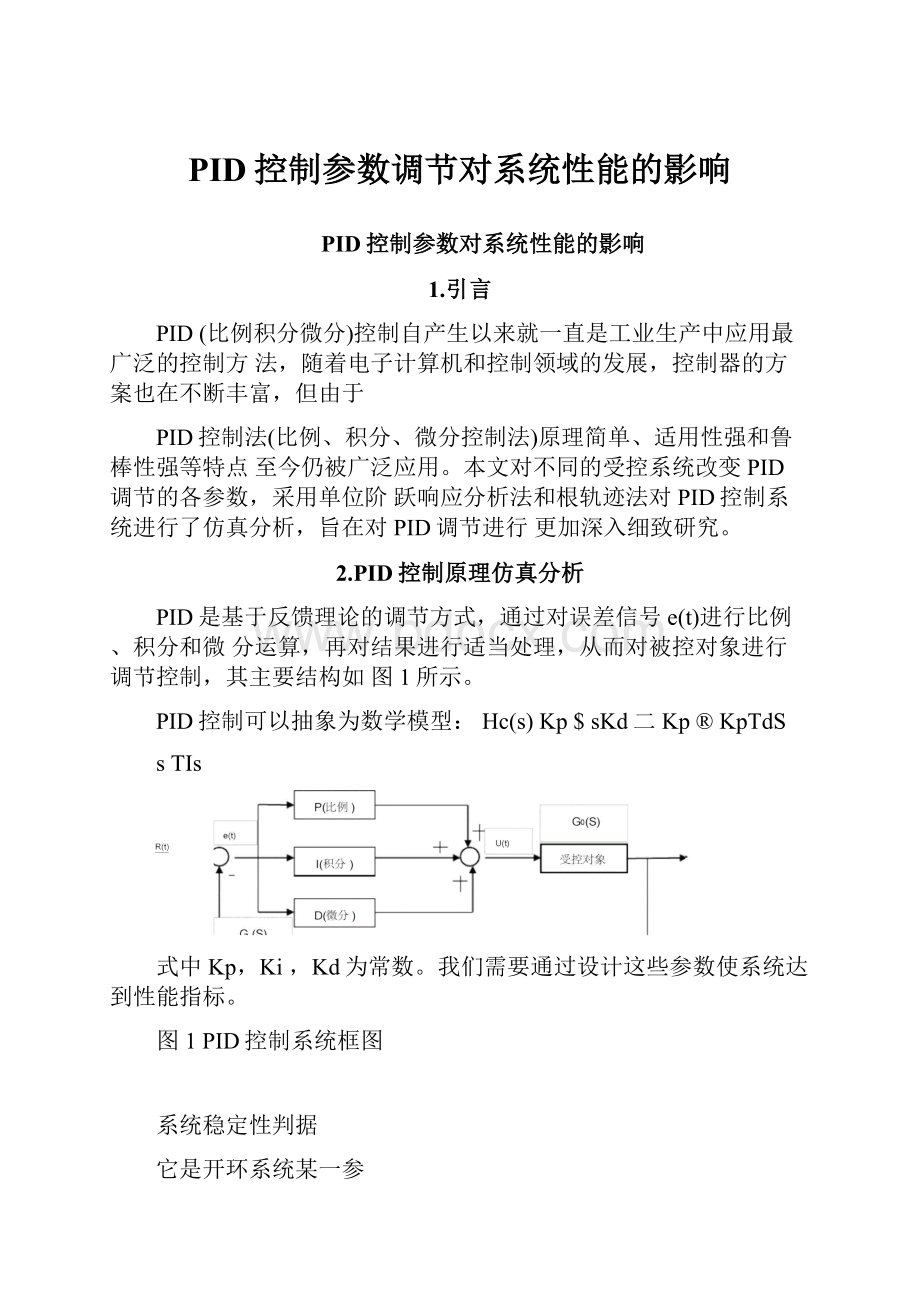
PID是基于反馈理论的调节方式,通过对误差信号e(t)进行比例、积分和微分运算,再对结果进行适当处理,从而对被控对象进行调节控制,其主要结构如图1所示。
PID控制可以抽象为数学模型:
Hc(s)Kp$sKd二Kp®KpTdS
sTIs
式中Kp,Ki,Kd为常数。
我们需要通过设计这些参数使系统达到性能指标。
图1PID控制系统框图
系统稳定性判据
它是开环系统某一参
根轨迹法是分析和设计线性定常控制系统的图解方法,
数不断变化时,闭环系统特征方程根在S平面上变化的轨迹。
当开环增益或其他
参数改变时,其全部数值对应的闭环节点全部可在根轨迹图上确定。
系统的稳定性由系统闭环极点唯一确定,而系统的稳态性能和动态性能又与闭环零极点在S
平面上的位置密切相关,所以根轨迹不仅可以直接给出闭环系统时间响应的全部信息,还可指明开环零点、极点应该怎样变化才能满足给定闭环系统的性能指标要求。
若根轨迹全部在S左半平面,则不论参数怎么变化系统都是稳定的;若根轨迹在虚轴上,则系统临界稳定;若根轨迹全部在S右半平面,则系统是不稳定的;若根轨迹在整个S平面,则系统稳定性与开环增益K的大小有关。
我们对系统G0(s)
比例(P)控制对系统的影响
(s2)2(s3)调节不同的比例系数进行比例环节控制,
则系统G(s)Gc(s)Go(s)=KpGo(s)取Kp=1,5,10,15,20和25,系统的
单位阶跃响应如图2(a)所示。
从图中可以看出,随着比例控制系数不断增大,稳定下来的值接近1,即稳态的误差越来越小。
比例控制可以减小系统的静态误差,改善系统的稳态性能,但同时达到稳态所用的时间变长,使系统超调量增大。
对于不同的比例系数,用Matlab绘制的系统的根轨迹如图2(b)所示。
由图可知,当比例控制系数大致Kp>101时,系统的根轨迹将延伸到S平面的右侧,系统变得不稳定,所以增大比例控制系数Kp将会使系统的稳定性变差,因此单纯使用比例环节有一定的局限性。
图2(a)不同比例系数下的系统时域响应图
图2(b)系统根轨迹图
依然选取系统G0(s)
微分(D)控制对系统的影响
2进行不同程度的微分控制,则调节后系统
(s2)2(s3)
G(s)Gc(s)Go(s)KdSGo(s)分别令Kd为1,5,10,15,作出系统的单位阶
跃响应,和调节后系统根轨迹图,分别如图3(a),(b)所示。
图3(a)不同微分系数的系统时域响应
RootLocus
-3.5-3-25-2-1,5-14)50Q5
RealAxle(eeconds'1)
图3(b)微分调节后系统的根轨迹图
从图3(a)中的仿真结果可以看出,不同的微分调节会影响其超调幅度,微分系数Kd越大,系统超调越大,因此可以选取适当的微分系数控制超调,改善系统的动态性。
并且可以看出微分控制只对动态过程起作用,不影响系统的稳态性,且对系统噪声非常敏感。
所以单一的微分控制器不宜与被控对象串联起来单独使
用。
由图3(b)可以知道增加微分环节后根轨迹全部在S左半平面,系统稳定。
因
为微分调节增加了开环零点,导致根轨迹左移。
积分(I)控制对系统的影响
统G(s)K|SGo(s),分别取Ki为1,5,10,15作出调节前后系统的单位阶跃
响应和根轨迹图,分别如图4(a),(b),(c所示
图4(a)积分调节前的系统单位阶跃响应图
图4(c)积分调节后系统根轨迹图
通过观察图4系统时域响应看得出来,在加入积分控制前,系统静态稳定值与真实值相差甚远。
但加入积分控制后,系统的稳态值接近于1,显然积分控
制有利于消除稳态误差,提高稳态性能。
此外,我们选取不同的积分系数进行调节,由图4(b)可知,积分系数会对系统动态性产生影响,积分系数K越小,系统
响应速度越快,但K过小会使系统产生很大的超调,不利于系统稳态性。
对比前文图2(b)和图4(c),我们可以看到积分调节后当开环增益大于时,根
轨迹将进入S右半平面,系统变得不稳定。
显然调节后增加了一个开环极点,系
统根轨迹右移,不利于系统稳定。
1
的系统Go(S)E,分别令为1和2对其进行积分调节,取积分系数为
1,进行仿真,如图4(d),(e)所示
0时,不应该进行积分调节。
显然当原系统型数不为0时,进行积分调节会使超调增加巨大,无限振荡,系统不稳定,因此对于原系统型数不为
比例微分(PD)控制对系统的影响
通过改变Kp、Td的值进行调节
图5(a)原系统阶跃响应
我们发现原系统具有较大的稳态误差和超调量,故我们选取适当的比例系数
和微分系数进行调节,选择Kp100调节Td的大小,仿真结果如图5(b)所示
节Td的大小能够很好地减小超调,并且响应速度加快,系统的动态性和稳态性能改善了。
但系统始终还有稳态误差的存在,并且随着Td的增大,系统调节时
间变长。
故比例微分调节亦有缺点。
比例积分(PI)控制对系统的影响
节。
仿真结果见图6
?
4R1b1214
TirneHOJhds)
(c)KP=200,TI=100
(d)KP=300,TI=100
图6比例积分调节仿真图
从图中我们可看到经过比例积分调节后,系统的稳态误差消除或者减小,稳态精度提高,稳态性能得到改善。
但是系统超调增加,虽然可以通过比例系数和积分系数进行调节,但是作用不明显。
因此PI控制器主要用来改善控制系统的稳态性能。
2
KDsKPsKI1
~2
ss3s15
比例微分积分(PID)对系统的影响
依旧取上述系统,控制系统变为G(s)Gc(s)Go(s)
令Kd20KP100KI400做出此时系统的单位阶跃响应和根轨迹。
如图7
(a)、(b)所示
5WRnponuLcku*
由图可知系统经过PID控制后,稳态误差消除,超调量减小到很小的程度,响应速度加快,系统动态性和稳态性都得到改善。
同时系统根轨迹全部在S平面左半平面,系统保持稳定。
PID控制效果令人满意,因此在工业过程控制系统中广泛使用PID控制器。
3.总结PID控制器各环节对系统性能的影响
比例(P)控制规律
P控制器实质上是一个具有可调增益的放大器。
在信号变换过程中,P控制器只改变信号的增益而不影响相位。
在串联校正中,增大控制器增益Kp可以提高系统的开环增益,减小系统的稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统不稳定。
因此很少单独使用比例控制器。
积分(I)控制规律
在串联校正中,采用积分控制器可以提高系统的型别(无差度),减小或者消除
系统稳态误差,有利于系统稳态性能的提高。
但积分控制使系统增加了一个位于原点的开环极点,使信号产生90的相角滞后,对系统稳定性不利。
因此通常
不宜采用单一的积分控制器。
微分(D)控制规律
在串联校正中,微分控制作用只对动态过程起作用,通过增加开环零点,改善系统稳定性。
而对稳态过程没有影响,并且对系统噪声非常敏感,因此单一的D
控制器在任何情况下都不宜与被控对象串联单独使用。
比例微分(PD)控制规律
PD控制器中的微分作用能反应输入信号的变化趋势,产生有效的早期修正信号,以增加系统的阻尼程度,改善系统稳定性。
在串联时可使系统增加一个开环零点,有助于系统动态性能的改善。
比例积分(PI)控制规律
在串联校正中,PI控制器相当于在系统中增加了一个位于原点的开环极点,可以提高系统的型别,以消除或减小系统稳态误差,改善系统稳态性能。
同时也增加了一个位于S左半平面的开环零点,用来减小系统的阻尼程度,缓和PI控制器极点对系统稳定性及动态过程产生的不利影响。
但是PI控制器对于系统动态性能改善不明显,故PI控制器主要用来改善系统的稳态性能。
比例积分微分(PID)控制微分
当使用PID控制器进行串联校正时,除了可使系统型别提高一级外,还将提供两个负开环零点。
故与PI控制器相比,PID除了同样具有提高系统的稳态性能的优点外,还多提供一个负实零点,从而在提高系统动态性方面具有更大的优越性。
4.PID控制器参数的选取
长期以来,在设计和应用PID控制器的过程中,PID参数的选取一直是一个难题,因为比例作用在改善系统稳态性的同时会降低系统的动态性,甚至使系统不稳定;积分作用有利于消除稳态误差但使系统稳定性下降;微分作用对于干扰敏感,使系统抑制干扰能力降低。
因此,PID参数的选择必须兼顾动态性和静态性能指标。
通常应使I部分发生在系统的低频段,使D部分发生在系统频率特性的中频段。
本文仅做简要介绍PID控制器参数的整定方法,不做深入研究。
参数整定方法主要有以下几类:
基于被控过程对象参数辨识出对象模型,利用极点配置整定法整定;基于抽取对象输出响应特征参数整定法;参数优化方法;基于模式识别的专家系统法等。
常用的方法有:
试凑法、临界比例度法(Z/N法)、衰减曲线法、过程反映曲线法、继电器PID自整定法等。
参考文献
[1]胡寿松•自动控制原理[M].第六版.北京:
科学出版社,2013:
236-239
[2]RichardC.Dorf,RobertH.Bishop.现代控制系统[M].第十二版•谢红卫,孙志强,宫二玲,张
纪阳,译.北京:
电子工业出版社,2014:
205-209
[3]余明亮,彭菊红PID控制参数对系统性能的影响研究J].物联网技术,2018,04:
98-98
[4]樊国平智能PID控制系统的设计与研究[D].杭州:
浙江工业大学,2005


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- PID 控制 参数 调节 系统 性能 影响
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
-
山西省煤矿安全质量标准化标准及考核评级办法1Word文档下载推荐.docx
-
编译原理教程第四版答案.docx
-
职称考试试题答案小学学前教育新1Word格式.docx
-
基于plc物料传送系统设计毕业论文Word文档下载推荐.docx
-
基于plc物料传送系统设计毕业论文文档格式.docx
-
exercices1mai文档格式.docx
-
牛津沪教版小学英语四年级英语下册全套全册精品教案推荐Word下载.docx
-
Java组件Word文档下载推荐.docx
-
河南省信阳市五校联盟届高三上学期开学考试历史试题附答案解析Word格式文档下载.docx
-
文综大题答题模板Word文档下载推荐.docx
-
一二年级手工教案文档格式.docx
-
3281一空解脱门Word格式.docx
-
我上初二了作文20篇Word文件下载.docx
-
我上初二了作文20篇Word文档下载推荐.docx
-
生物必修三高考题选Word格式文档下载.docx
-
学校会议记录Word格式文档下载.docx
-
信息技术教案五下Word文件下载.docx
-
参考实用城市智能交通系统总体设计文档格式.docx
-
联系河施工小结文档格式.docx
