 机械振动实验报告讲解.docx
机械振动实验报告讲解.docx
- 文档编号:23428646
- 上传时间:2023-05-17
- 格式:DOCX
- 页数:30
- 大小:1.84MB
机械振动实验报告讲解.docx
《机械振动实验报告讲解.docx》由会员分享,可在线阅读,更多相关《机械振动实验报告讲解.docx(30页珍藏版)》请在冰豆网上搜索。
机械振动实验报告讲解
实验三:
简谐振动幅值测量
一、实验目的
1、了解振动位移、速度、加速度之间的关系。
2、学会用压电传感器测量简谐振动位移、速度、加速度幅值
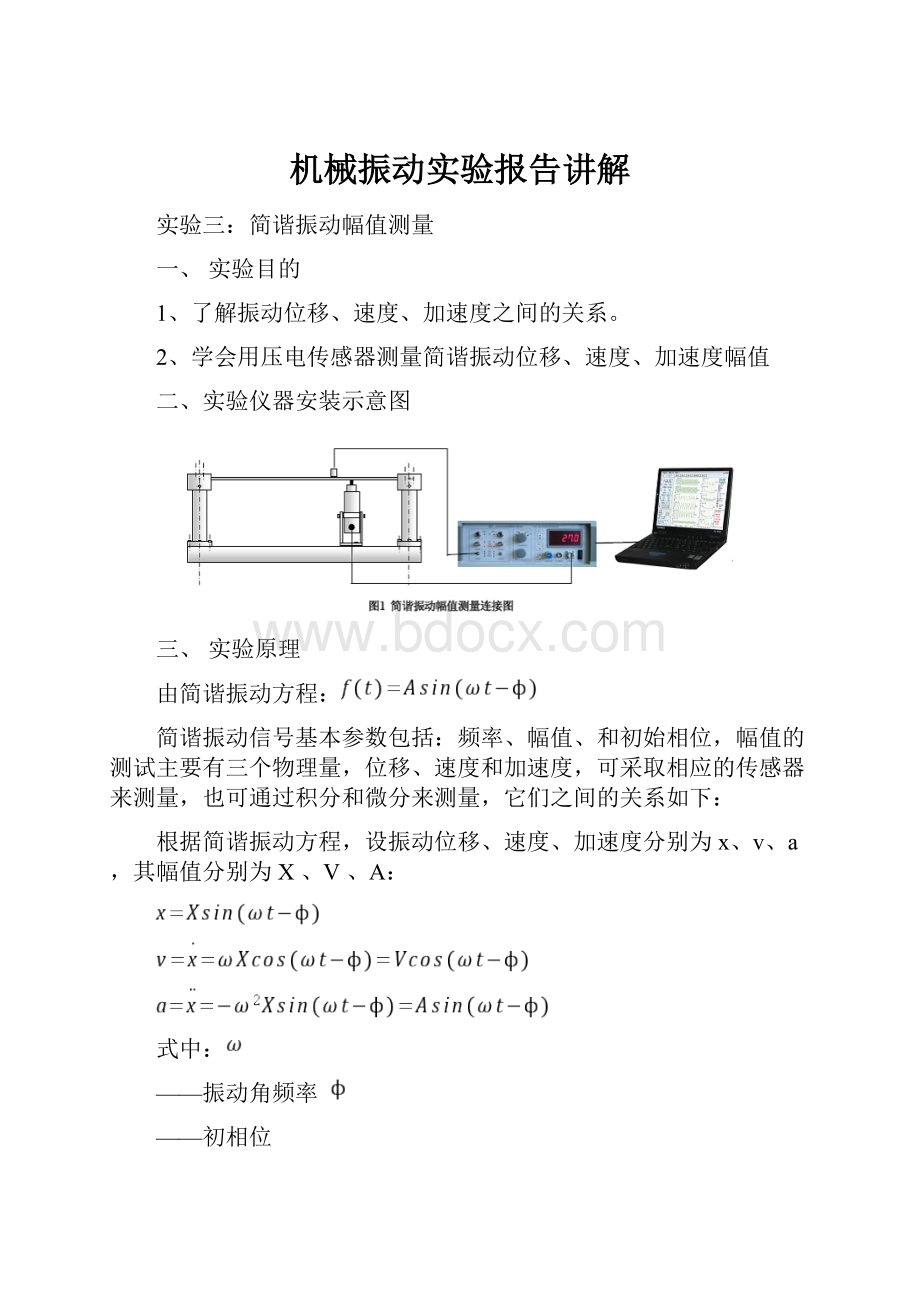
二、实验仪器安装示意图
三、实验原理
由简谐振动方程:
简谐振动信号基本参数包括:
频率、幅值、和初始相位,幅值的测试主要有三个物理量,位移、速度和加速度,可采取相应的传感器来测量,也可通过积分和微分来测量,它们之间的关系如下:
根据简谐振动方程,设振动位移、速度、加速度分别为x、v、a,其幅值分别为X、V、A:
式中:
——振动角频率
——初相位
所以可以看出位移、速度和加速度幅值大小的关系是:
。
振动信号的幅值可根据位移、速度、加速度的关系,用位移传感器或速度传感器、加速度传感器进行测量,还可采用具有微积分功能的放大器进行测量。
在进行振动测量时,传感器通过换能器把加速度、速度、位移信号转换成电信号,经过放大器放大,然后通过AD卡进行模数转换成数字信号,采集到的数字信号为电压变化量,通过软件在计算机上显示出来,这时读取的数值为电压值,通过标定值进行换算,就可计算出振动量的大小。
DASP软件参数设置中的标定
通过示波调整好仪器的状态(如传感器档位、放大器增益、是否积分以及程控放大倍数等)后,要在DASP参数设置表中输入各通道的工程单位和标定值。
工程单位随传感器类型而定,或加速度单位,或速度单位,或位移单位等等。
传感器灵敏度为KCH(PC/U)(PC/U表示每个工程单位输出多少PC的电荷,如是力,而且参数表中工程单位设为牛顿N,则此处为PC/N;如是加速度,而且参数表中工程单位设为m/s2,则此处为PC/m/s2);
INV1601B型振动教学试验仪输出增益为KE;积分增益为KJ(INV1601型振动教学试验仪的一次积分和二次积分KJ=1);
INV1601B型振动教学试验仪的输出增益:
加速度:
KE=10(mV/PC)
速度:
KE=1
位移:
KE=0.5
则DASP参数设置表中的标定值K为:
四、实验步骤
1、安装仪器
把激振器安装在支架上,将激振器和支架固定在实验台基座上,并保证激振器顶杆对简支梁有一定的预压力(不要露出激振杆上的红线标识),用专用连接线连接激振器和INV1601B型振动教学试验放大仪的功放输出接口。
把带磁座的加速度传感器放在简支梁的中部,输出信号接到INV1601B型振动教学试验仪的加速度传感器输入端,功能档位拔到加速度计档的a加速度。
2、打开INV1601B型振动教学试验仪的电源开关,开机进入DASP2006标准版软件的主界面,选择单通道按钮。
进入单通道示波状态进行波形示波。
3、在采样参数设置菜单下输入标定值K和工程单位m/s2,设置采样频率为4000Hz,程控倍数1倍。
4、调节INV1601B型振动教学试验仪频率旋钮到40Hz左右,使梁产生共振。
5、在示波窗口中按数据列表进入数值统计和峰值列表窗口,读取当前振动的最大值。
6、改变档位v(mm/s)、d(mm)进行测试记录。
7、更换速度和电涡流传感器分别测量a(m/s2)、v(mm/s)、d(mm)。
五、实验结果
1、实验数据
传感器类型
频率f(Hz)
a(m/s2)档
v(mm/s)档
d(mm)档
加速度
44.9
304
1085
393
速度
44.9
48
176
62
电涡流位移计
44.9
102
2、根据实测位移x,速度v,加速度a,按公式计算出另外两个物理量。
实测值计算值
a(m/s2)
v(mm/s)
d(mm)
加速度304(m/s2)
108.5
39.3
速度176(mm/s)
480
124
位移102(mm)
205.6
4579.8
六、实验分析
实验数据反映出,在实验过程中,由于标定值设置的不当,导致出现较大范围的偏差。
而根据实验原理,在相同的振动条件下,加速度、速度传感器和电涡流位移计测出的加速度、速度和位移值应该比较接近。
实验四:
简谐波幅域统计参数的测定
一、实验目的
1、学习幅域各统计参量及其相互关系;
2、学会对振动波形幅域的测试和分析。
二、实验仪器安装示意图
三、实验原理
每一个振动量对时间坐标作出的波形,可以得到峰值、峰峰值、有效值和平均值等量值,它们之间存在一定的关系。
振动量的描述常用峰值表示,但在研究比较复杂的波形时,只用峰值描述振动过程是不够的,因为峰值只能描述振动大小的瞬时值,不能反应产生振动的时间过程。
平均绝对值和有效(均方根)值可描述时间过程。
这些参量都与幅值密切相关。
峰值定义为:
即从波形的基线位置到波峰的距离,也可称为振幅。
峰峰值是正峰到负峰间的距离。
平均绝对值的定义为:
=
有效值定义为:
=
平均绝对值的使用价值较小,而有效值因与振动的能量有直接关系,所以使用价值较大,特别是对随机振动的研究,使用价值更大。
简谐振动波形的峰值、有效值和平均绝对值示于图2。
各量之间的关系为:
这些关系式更通用的形式为:
称为波形因数,
称为波峰因数,
和
给出了所研究振动波形的指标,对正弦振动,
=1.11≈1分贝,
=1.414≈3分贝。
关于波形峰值、有效值和平均绝对值之关系的分析,对位移、速度、加速度和各种迅号波形都是适用的,但各种不同波形的
和
值是不一样的,有时有很大的差别。
例如正弦波、三角波和方波,其
和
值分别列于表1—1。
四、实验步骤
1、安装仪器
把激振器安装在支架上,将激振器和支架固定在实验台基座上,并保证激振器顶杆对简支梁有一定的预压力(不要露出激振杆上的红线标识),用专用连接线连接激振器和INV1601B型振动教学试验放大仪的功放输出接口。
把带磁座的加速度传感器放在简支梁的中部,输出信号接到INV1601B型振动教学试验仪的加速度传感器输入端,功能档位拔到加速度计档的a加速度。
2、打开INV1601B型振动教学试验仪的电源开关,开机进入DASP2006标准版软件的主界面,选择单通道按钮。
进入单通道示波状态进行波形示波。
3、在采样参数设置菜单下输入标定值K和工程单位m/s2,设置采样频率为4000Hz,程控倍数1倍。
4、调节INV1601B型振动教学试验仪频率旋钮到40Hz左右,适当调节激振器使梁产生共振。
5、在示波窗口中按数据列表进入数值统计和峰值列表窗口,读取当前振动的最大值。
6、根据公式计算其它统计参数。
五、实验结果
该实验主要是为了测定幅域统计参数之间的关系,不考虑其实际的物理意义,对信号波形来说作为电信号来处理,单位为(mv)
频率f(Hz)
波峰值
波谷值
峰峰值
平均绝对值
有效值
波形因数
波峰因数
45
803.223
-549.316
1352.539
676.27
354.051
1.204
2.269
42
970.1538
-985.4126
1955.566
977.783
696.1911
1.11109
1.41543
六、实验分析
通过本次实验,得出了不同频率下测得的响应,并对相关幅域统计参数进行计算,并求出了波形系数和波峰系数这两个重要参数。
这些统计量对后期的实验有重要价值。
五、实验结果
试验次数
频率(Hz)
参考传感器
待测信号
幅值(m/s2)
输出增益KE0
灵敏度pc/m/s2
幅值(mm/s)
输出增益KE
灵敏度mV/mm/s
A01
A02
A0
A1
A2
A
1
42.5
783
-775
1558
10
4.67
1979
-1984
3963
1
31.72
2
42
604
-593
1197
10
4.67
1550
-1551
3101
1
32.21
3
43
642
-628
1270
10
4.67
1611
-1606
3217
1
30.89
待测信号标定值取平均值为
31.61
六、实验分析
本次实验用双踪试波法测传感器的灵敏度。
所得的灵敏度数据31.61与真实数据33.33非常接近,从而证实了实验方法的正确性,并为实践中的测试提供理论基础。
五、实验数据
机械振动系统固有频率测量结果
频率(Hz)
测试方法
第一阶频率
第二阶频率
第三阶频率
幅值判别法
44.5
163.4
373.5
相位判别法图像
位移d
43.5
163.2
373
速度v
44.6
163.2
371.7
加速度a
44.5
163
371.6
传函判别法
44.9
648.4
703.1
自谱分析法
44.4
647.4
704.1
六、实验结果分析
通过本次实验,可以得出以下结论:
1、幅值判别法和相位判别法在测量高阶频率时较为精确。
2、传函判别法和自谱分析法因为方法简单,在测试系统主频率时较为实用。
五、实验结果
1、锤击法测量
配重情况
不加配重
加一块配重(1kg)
加两块配重(2kg)
测试的频率(Hz)
f0=44.4
f1=31.8
f2=25.9
2、简支梁等效质量m(梁的均布质量折合到梁的中部的质量)和等效刚度k的计算
梁的质量m0=1kg
把测得和数据代入方程联立解得:
k=80.16kN/m
m=1.03kg
折合到梁中部的集中等效质量与梁质量的比值:
m/m0=1.03
3、理论计算值与测试值
梁固有频率f0(Hz)
梁的等刚度k(kN/m)
理论计算值
45.1
80.16
实测值
44.4
六、实验分析
在本次实验中,对单自由度的简支梁系统进行建模。
先用锤击法测出系统在不同条件下的响应频率,再通过理论假设和相关计算得出梁的等效刚度和等效质量。
五、实验结果
1、记录测试数据
配重情况
不加配重
压电加速度传感器测(35g)
速度传感器测(135g)
加一块配重(1kg)
加两块配重(2kg)
加两块半配重(2.5kg)
加电机和两块半配重(2.5kg)
理论计算频率(Hz)
45.1
44.5
42.6
32.2
26.4
24.5
测试的频率(Hz)
f0=45.0
f1=44.4
f2=42.5
f3=32.0
f4=26.0
f5=24.1
f6=
注:
由于实验条件的限制,“加电机和两块半配重”这一项实验未能进行。
2、绘制出频率与质量的变化曲线
质量-频率变化曲线
六、实验分析
由于实验条件所限,“加电机和两块半配重”项的测量无法进行。
通过测绘出的质量-频率变化曲线来看,基本反映了系统在负载影响下的频率变化情况。
尤其是附着式的传感器(如实验中的加速度传感器和速度传感器)在测量时自身的质量对系统带来负面影响,因此在高精度测量中,尽量选用费附着式的传感器(如实验中的电涡流位移计)。
五、实验结果
1、记录模态参数
模态参数
第一阶
第二阶
第三阶
第四阶
第五阶
频率(Hz)
20.944
113.572
184.961
294.123
510.991
质量
1
1
1
1
1
刚度
17320
509200
1351000
3415000
10310000
阻尼
2.18
7.563
38.95
22.553
38.06
2、打印出各阶模态振型投影图。
第一阶模态图
第二阶模态图
第三阶模态图
第四阶模态图
第五阶模态图
六、实验分析(见实验26的实验分析)
五、实验结果
1、记录模态参数
模态参数
第一阶
第二阶
第三阶
第四阶
第五阶
频率
23.130
101.585
255.940
489.62
865.228
质量
1
1
1
1
1
刚度
21120
407400
2586000
9464000
29550000
阻尼
3.136
10.20
7.667
29.52
20.83
2、打印出各阶模态振型投影图。
第一阶模态图
第二阶模态图
第三阶模态图
第四阶模态图
第五阶模态图
六、实验分析(见实验26的实验分析)
五、实验结果
1、记录模态参数
模态参数
第一阶
第二阶
第三阶
第四阶
第五阶
频率
53.191
123.955
268.424
455.587
659.581
质量
1
1
1
1
1
刚度
111700
606600
2844000
8194000
17170000
阻尼
5.182
9.387
21.53
30.92
20.25
2、打印出各阶模态振型投影图。
第一阶模态图
第二阶模态图
第三阶模态图
第四阶模态图
第五阶模态图
六、实验分析
在实验24、25、26,分别对等宽度梁、等强度梁和圆盘进行了模态分析。
通过各阶模态图可以看出系统各阶的频率、阻尼比、模态质量、模态刚度和模态阻尼。
由于实验时间所限,划分的网格比较稀疏,这无疑影响了系统模态分析的质量。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械振动 实验 报告 讲解
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《化学反应的快慢和限度》教案鲁科版必修2.docx
《化学反应的快慢和限度》教案鲁科版必修2.docx
-
《21世纪大学实用英语》综合教程课程教学大纲.docx
-
《赶海》的教学设计.docx
-
《小儿推拿如何治感冒》教学设计方案.docx
-
《每个孩子都能成功》读后感1000字.docx
-
1 我们的远古祖先.docx
-
《试吧大考卷》高中全程训练计划历史月考仿真一.docx
-
《统计学》试题C.docx
-
3消防安全重点单位四个能力自我评估报告备案表.docx
-
《电子商务基础与应用》慕课版配套教学教案.docx
-
《环境工程学》课程教学大纲.docx
-
《理想国》读书笔记1500字精选多篇.docx
-
《社会保险法》知识问答.docx
-
《铁路电力管理规则》《铁路电力安全工作规程》课件.docx
-
《中小学公共安全教育读本》教案.docx
-
8法律专项银行招聘考试法律法规必读知识点15页可直接打印.docx
-
10万吨年乙苯脱氢制苯乙烯装置工艺设计与实现可行性方案.docx
-
15MW风电机组运行维护手册.docx
-
20XX工作计划范文车间.docx
-
73新课程结构的主要内容与特征.docx
-
1000吨果品气调库建设项目可行性研究报告.docx
-
《8成语故事》导学案.docx
-
《分享的快乐方案》教学设计.docx
-
《建筑企业管理学》复习题及答案.docx
-
《宿舍信息管理系统》需求分析说明书.docx
-
《众筹合伙协议》合同干净版.docx
-
5以内加减法口算天天练强烈推荐110.docx
-
8年级上科学知识点总结.docx
-
10以内加减法练习题.docx
-
20XX机关效能建设工作计划.docx
-
49中学生物竞赛辅导第六章动物生理上.docx
-
081 除灰系统设备管道安装.docx
-
初中常见化学式及化学方程式大全.docx
-
仓管员心得体会.docx
-
父母对儿子说的话.docx
-
初中英语阅读理解常见题型及答题技巧.docx
-
产品定义与概念交互设计.docx
-
钢结构临时用电方案.docx
-
创新创业能力的构成要素.docx
-
厂区埋地管道安装施工方案.docx
-
淳化县栆坪沟造林规划设计说明书.docx
-
高分子化学基础实验.docx
-
成本管理核算办法1.docx
-
大创申请书范本.docx
-
出租车计价器电路设计.docx
-
高考英语作文优秀范文分类全.docx
-
大学考试房屋建筑学试题库及答案.docx
-
高效企业文化的三个共同特征.docx
-
初一语文辅导资料.docx
-
大学英语六级考试必备短语句型.docx
 浙教版劳动八下项目二任务一《家乡农作物种植》课件.pptx
浙教版劳动八下项目二任务一《家乡农作物种植》课件.pptx
