 循迹小车代码.docx
循迹小车代码.docx
- 文档编号:26321982
- 上传时间:2023-06-17
- 格式:DOCX
- 页数:6
- 大小:13.84KB
循迹小车代码.docx
《循迹小车代码.docx》由会员分享,可在线阅读,更多相关《循迹小车代码.docx(6页珍藏版)》请在冰豆网上搜索。
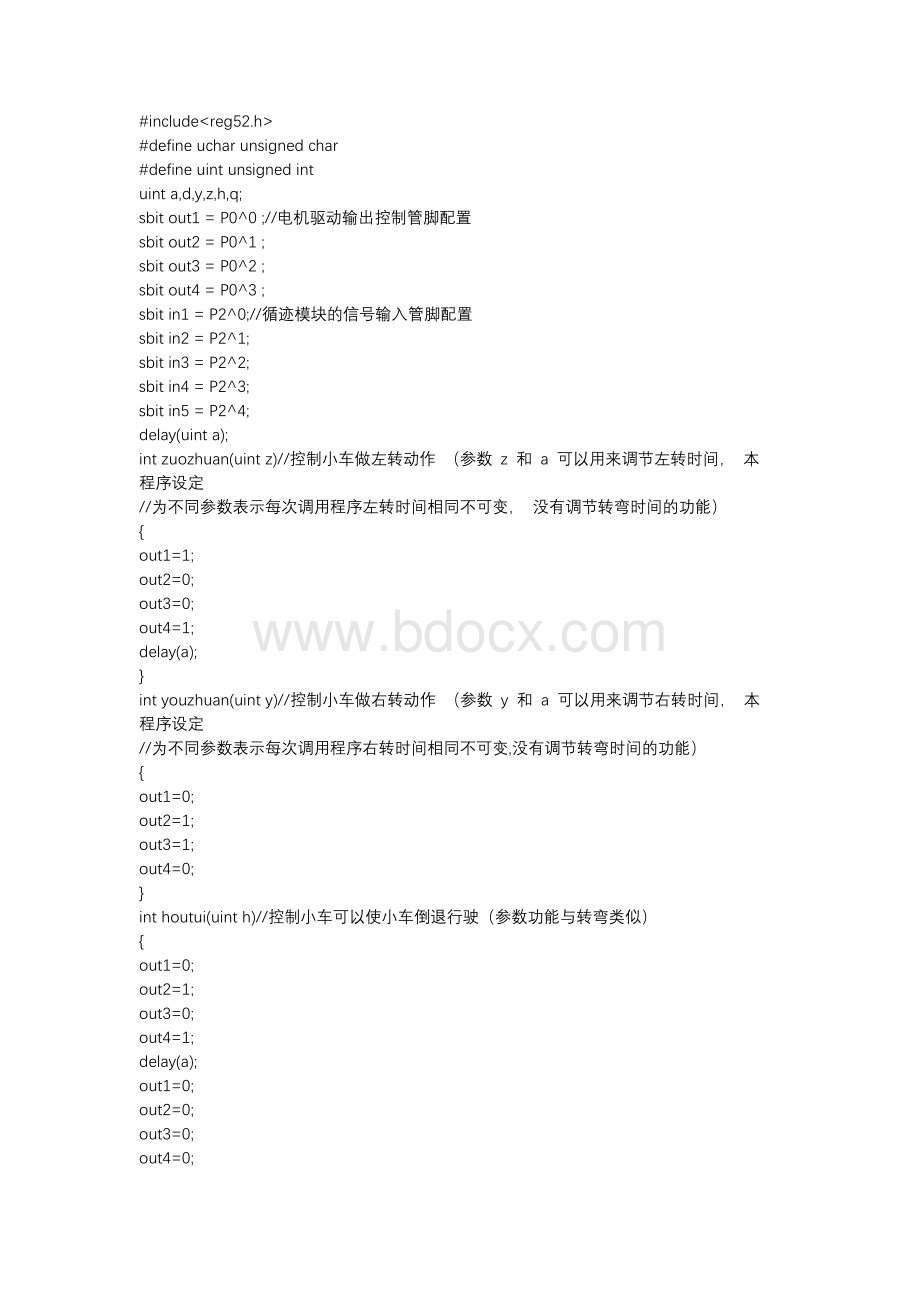
#include
#defineucharunsignedchar
#defineuintunsignedint
uinta,d,y,z,h,q;
sbitout1=P0^0;//电机驱动输出控制管脚配置
sbitout2=P0^1;
sbitout3=P0^2;
sbitout4=P0^3;
sbitin1=P2^0;//循迹模块的信号输入管脚配置
sbitin2=P2^1;
sbitin3=P2^2;
sbitin4=P2^3;
sbitin5=P2^4;
delay(uinta);
intzuozhuan(uintz)//控制小车做左转动作(参数z和a可以用来调节左转时间,本
程序设定
//为不同参数表示每次调用程序左转时间相同不可变,没有调节转弯时间的功能)
{
out1=1;
out2=0;
out3=0;
out4=1;
delay(a);
}
intyouzhuan(uinty)//控制小车做右转动作(参数y和a可以用来调节右转时间,本
程序设定
//为不同参数表示每次调用程序右转时间相同不可变,没有调节转弯时间的功能)
{
out1=0;
out2=1;
out3=1;
out4=0;
}
inthoutui(uinth)//控制小车可以使小车倒退行驶(参数功能与转弯类似)
{
out1=0;
out2=1;
out3=0;
out4=1;
delay(a);
out1=0;
out2=0;
out3=0;
out4=0;
delay(20);
}
intdengdai(uintd)//使小车停止当前所有动作,停止时间可调。
{
out1=0;
out2=0;
out3=0;
out4=0;
delay(d);
}
voidqianjin(q)//使小车向前行驶,行驶时间可调
{
out1=1;
out2=0;
out3=1;
out4=0;
delay(q);
}
voidxunji()
{
P1=P1|0XF0;delay(5);
if(in1==0){dengdai();youzhuan(100);while(in3==1);}
elseif(in5==0){dengdai();zuozhuan(100);while(in3==1);}
elseif(in2==0){dengdai();youzhuan(30);}
elseif(in4==0){dengdai();zuozhuan(30);}
elseif(in3==0){qianjin(20);}
else{qianjin(20);}
}
intdelay(uinta)//延时子函数
{
uintx,y;
for(x=a;x>0;x--)
for(y=110;y>0;y--);
}
voidmain()
{
delay(2000);
while
(1)
xunji();
}
#include
#defineucharunsignedchar
#defineuintunsignedint
//D0-D7:
f,b,a,e,d,h,c,g共阴依次编码//
74LS04反相器驱动数码管
ucharcodetable[10]={0x5F,0x42,0x9E,0xD6,0xC3,0xD5,0xDD,0x46,0xDF,0xD7};
uchari=0;//用于0-3数码管轮流显示
uintj=0;//计时的次数
uinttime=0;//计时
uintpwm=16;//占空比
uintspeed;//调制PWM波的当前的值
sbitR=P3^2;//右边传感器
P3^2sbitL=P3^3;//左边传感器
P3^3//电机驱动口定义
sbitENB=P1^0;//前轮电机停止控制使能
sbitENA=P1^1;//后轮控制调速控制端口
sbitIN1=P1^2;//前轮
sbitIN2=P1^3;//前轮
sbitIN3=P1^4;//后轮
sbitIN4=P1^5;//后轮
voidInit(){
TMOD=0x12;//定时器0用方式2,定时器1用方式1
TH0=(256-200)/256;//pwm
TL0=(256-200)/256;
TH1=0x0F8;//定时2ms
TL1=0x30;
EA=1;
ET0=1;
ET1=1;
TR0=1;
TR1=1;
}
voidtim0(void)interrupt1//产生
PWM
{
speed++;
if(speed<=pwm)//pwm就相当于占100的比例
{
ENA=1;
}
elseif(speed<100)
{
ENA=0;
}
else
speed=0;
}
voidtime1()interrupt3//定时2ms
{
TH1=0x0F8;
TL1=0x30;
i=(i+1)%4;//0-3循环
j++;
if(i==0)//显示最低位数码管
{
P0=0x00;//段选清零防止乱码
P0=table[time%10];//送段码信号
}
if(i==1)
{
P0=0x00;
P0=table[time/10%10];
}
if(i==2)
{
P0=0x00;
P0=table[time/100%10];
}
if(i==3)
{
P0=0x00;
P0=table[time/1000%10];
}
P2=(0x10< if(j==500) { time++; //500次为1秒 j=0; } } voidforward()//前进 { IN2=1; IN1=0; } voidback()//后退 { IN2=0; IN1=1; } voidleft()//左转 { ENB=1;//打开使能 IN3=1; IN4=0; } voidright()//右转 { ENB=1;//打开使能 IN3=0; IN4=1; } voidstop()//停止 { IN2=0; IN1=0; IN3=0; IN4=0; } voidmain() { Init();//定时器初始化 while (1) { if(R==0&&L==1)//右传感器检测到黑线 { right();//右转 forward(); while(R==0&&L==1); } if(R==1&&L==0)//左传感器检测到黑线 { left(); forward(); while(R==1&&L==0); } if(R==0&&L==0)//都检测到黑线则停止 { stop(); j=0;//定时器仍在工作,计数时间清空 } else//都没有检测到黑线 { ENB=0;//关闭转向控制 forward(); } } }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 小车 代码
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 党组织、党员联系服务师生工作制度.docx
党组织、党员联系服务师生工作制度.docx
 物流与供应链管理 第七章 供应链综合计划.pptx
物流与供应链管理 第七章 供应链综合计划.pptx
-
民族团结教案doc格式.docx
-
民族团结教案doc格式.docx
-
中国象棋ppt模板.pptx
-
设备质量保证措施.docx
-
电力公司招聘行政能力测试试题及解析.docx
 回弹仪检测多孔砖砖强度计算表.xls
回弹仪检测多孔砖砖强度计算表.xls
-
汽车理论1.3.doc
-
电动汽车充换电站项目商业计划书.doc
-
幼儿园指南试题及答案.doc
-
护理教案模板.doc
-
资料台账表格.xlsx
-
红军长征的历史叙述是怎样形成的.docx
-
冷库工程合同.docx
-
部编版五年级上册语文课堂作业本答案(全).docx
-
《网络综合布线》说课稿.doc
-
材料进场,见证取样及检验制度.docx
-
20章--瓦斯综合利用.doc
-
[原创]STP保温板屋面及外墙保温施工技术方案.doc
-
隧道开挖作业台车计算书.docx
-
《减法的初步认识》教学设计.doc
-
教导处工作计划.docx
-
电机学第五版课后答案汤蕴璆完整版.docx
-
同仁堂案例成功启示.docx
-
经典钣金结构设计规范.doc
-
计算机各种进制转换练习题(附答案).doc
-
市场营销教学案例分析.docx
-
服装厂质量管理制度.docx
-
中职试验教材应用文写作(高教版_王崇国编)电子教案【全】.doc
-
控烟考评奖惩制度、标准、记录表.doc
-
小学生“学宪法-讲宪法”活动知识竞赛题库(含答案).docx
-
水利部门面试试题Word格式.doc
-
2020下半年云南省昆明市东川区城投集团招聘试题及解析Word文件下载.docx
-
深基坑工程日常巡视检查记录表Word文档下载推荐.docx
-
开工仪式合同书文档格式.doc
-
小屯小学学生心理健康状况排查表文档格式.doc
-
关于三书两报告工作的说明Word文档下载推荐.docx
-
英语话剧社教学计划Word文档格式.doc
-
深交所董秘资格考试题库及答案-完整版Word文件下载.doc
-
党支部党史教育专题组织生活会全套材料(12篇范文汇编)Word下载.docx
-
幼儿园错峰返园实施方案模板Word文档格式.docx
-
南开大学并行程序设计2019Word格式.doc
-
幼儿园交通安全教育活动方案Word文件下载.docx
-
宁波市居住建筑节能审查备案登记表文档格式.doc
-
小区弱电系统工程施工组织设计Word格式文档下载.docx
-
项目经费执行情况报告Word格式.docx
-
单位消防设施及器材管理档案Word文档格式.doc
-
最新人音版音乐六年级上册全册教案Word文件下载.docx
-
(完整版)(园林绿化、灌溉)施工组织设计Word格式文档下载.doc
-
主起落架承载及尺寸简化计算Word文档格式.doc
