 极大似然辨识及其MTLAB实现.doc
极大似然辨识及其MTLAB实现.doc
- 文档编号:263656
- 上传时间:2022-10-08
- 格式:DOC
- 页数:10
- 大小:553.50KB
极大似然辨识及其MTLAB实现.doc
《极大似然辨识及其MTLAB实现.doc》由会员分享,可在线阅读,更多相关《极大似然辨识及其MTLAB实现.doc(10页珍藏版)》请在冰豆网上搜索。
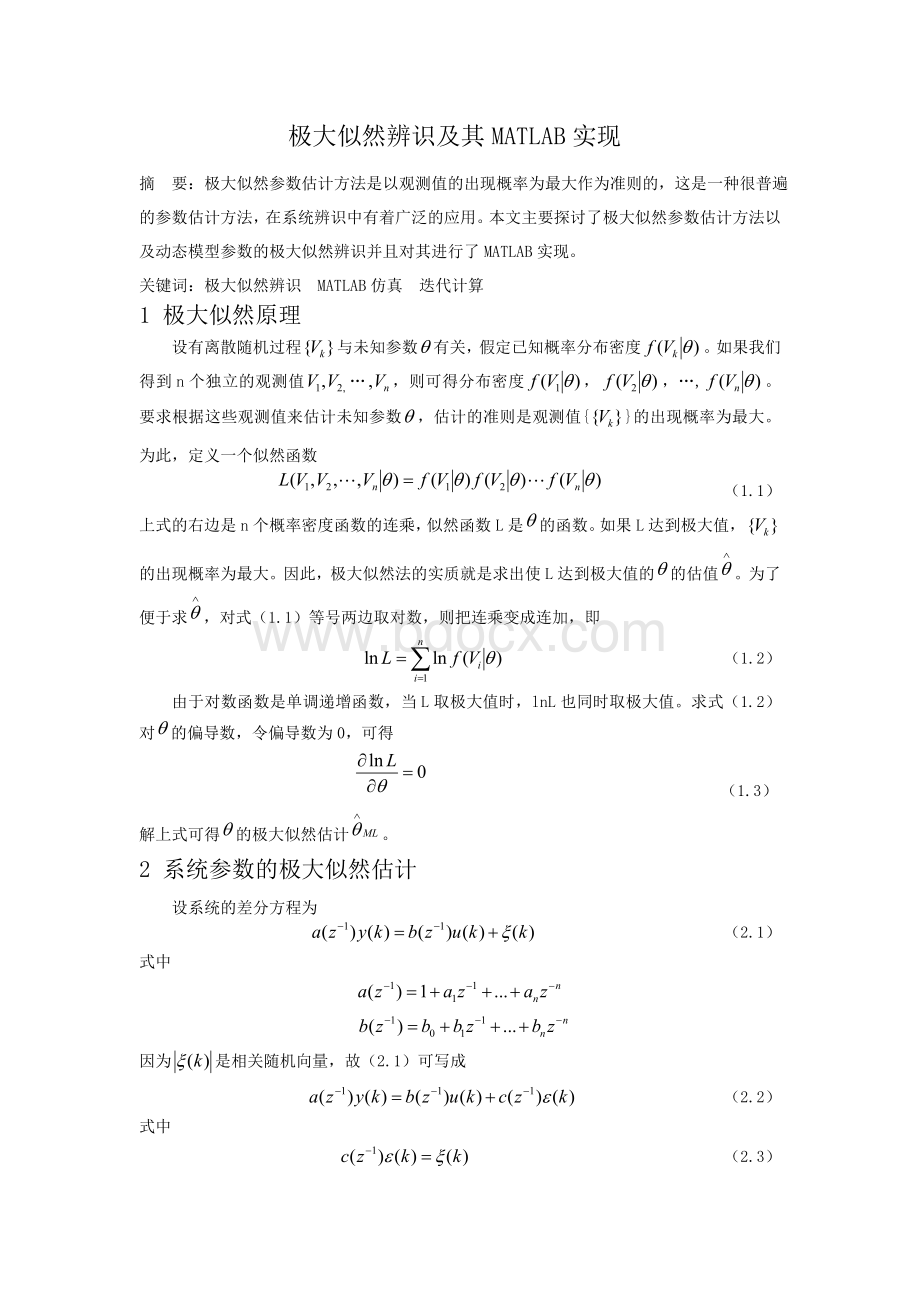
极大似然辨识及其MATLAB实现
摘要:
极大似然参数估计方法是以观测值的出现概率为最大作为准则的,这是一种很普遍的参数估计方法,在系统辨识中有着广泛的应用。
本文主要探讨了极大似然参数估计方法以及动态模型参数的极大似然辨识并且对其进行了MATLAB实现。
关键词:
极大似然辨识MATLAB仿真迭代计算
1极大似然原理
设有离散随机过程与未知参数有关,假定已知概率分布密度。
如果我们得到n个独立的观测值…,则可得分布密度,,…,。
要求根据这些观测值来估计未知参数,估计的准则是观测值{}的出现概率为最大。
为此,定义一个似然函数
(1.1)
上式的右边是n个概率密度函数的连乘,似然函数L是的函数。
如果L达到极大值,的出现概率为最大。
因此,极大似然法的实质就是求出使L达到极大值的的估值。
为了便于求,对式(1.1)等号两边取对数,则把连乘变成连加,即
(1.2)
由于对数函数是单调递增函数,当L取极大值时,lnL也同时取极大值。
求式(1.2)对的偏导数,令偏导数为0,可得
(1.3)
解上式可得的极大似然估计。
2系统参数的极大似然估计
设系统的差分方程为
(2.1)
式中
因为是相关随机向量,故(2.1)可写成
(2.2)
式中
(2.3)
(2.4)
是均值为0的高斯分布白噪声序列。
多项式,和中的系数和序列的均方差都是未知参数。
设待估参数
(2.5)
并设的预测值为
(2.6)
式中为预测误差;,,为,,的估值。
预测误差可表示为
(2.7)
或者
=
(2.8)
因此预测误差满足关系式
(2.9)
式中
假定预测误差服从均值为0的高斯分布,并设序列具有相同的方差。
因为与,和有关,所以是被估参数的函数。
为了书写方便,把式(2.9)写成
(2.10)
(2.11)
或写成
(2.12)
令k=n+1,n+2,…,n+N,可得的N个方程式,把这N个方程式写成向量-矩阵形式
(2.13)
式中
,
因为已假定是均值为0的高斯噪声序列,高斯噪声序列的概率密度函数为
(2.14)
式中y为观测值,和m为y的方差和均值,那么
(2.15)
对于符合高斯噪声序列的极大似然函数为
(2.16)
或
(2.17)
对上式(2.17)等号两边取对数得
(2.18)
或写为
(2.19)
求对的偏导数,令其等于0,可得
(2.20)
则
(2.21)
式中
(2.22)
越小越好,因为当方差最小时,最小,即残差最小。
因此希望的估值取最小
(2.23)
因为式(2.10)可理解为预测模型,而e(k)可看做预测误差。
因此使式(2.22)最小就是使误差的平方之和最小,即使对概率密度不作任何假设,这样的准则也是有意义的。
因此可按J最小来求的估计值。
由于e(k)式参数的线性函数,因此J是这些参数的二次型函数。
求使最大的,等价于在式(2.10)的约束条件下求使J为最小。
由于J对是非线性的,因而求J的极小值问题并不好解,只能用迭代方法求解。
求J极小值的常用迭代算法有拉格朗日乘子法和牛顿-拉卜森法。
下面介绍牛顿-拉卜森法。
整个迭代计算步骤如下:
(1)确定初始的值。
对于中的可按模型
(2.24)
用最小二乘法来求,而对于中的可先假定一些值。
(2)计算预测误差
(2.25)
给出
并计算
(2.26)
(3)计算J的梯度和海赛矩阵,有
(2.27)
式中
(2.28)
即
(2.29)
同理可得
(2.30)
(2.31)
将式(2.29)移项化简,有
(2.32)
因为
(2.33)
由求偏导,故
(2.34)
将(2.34)代入(2.32),所以
(2.35)
所以得
(2.36)
同理可得(2.30)和(2.31)为
(2.37)
(2.38)
根据(2.36)构造公式
(2.39)
将其代入(2.36),可得
(2.40)
消除可得
(2.41)
同理可得(2.37)和(2.38)式
(2.42)
(2.43)
式(2.29)、式(2.30)和式(2.31)均为差分方程,这些差分方程的初始条件为0,可通过求解这些差分方程,分别求出e(k)关于的全部偏导数,而这些偏导数分别为,和的线性函数。
下面求关于的二阶偏导数,即
(2.44)
当接近于真值时,e(k)接近于0。
在这种情况下,式(2.44)等号右边第2项接近于0,可近似表示为
(2.45)
则利用式(2.45)计算比较简单。
(4)按牛顿-拉卜森计算的新估值,有
(2.46)
重复
(2)至(4)的计算步骤,经过r次迭代计算之后可得,近一步迭代计算可得
(2.47)
如果
(2.48)
则可停止计算,否则继续迭代计算。
式(2.48)表明,当残差方差的计算误差小于时就停止计算。
这一方法即使在噪声比较大的情况也能得到较好的估计值。
3动态模型参数极大似然辨识及其MATLAB实现
设动态系统的模型表示为
式中,是均值为0,方差为2,服从正态分布的不相关随机噪声;u(k)和z(k)表示系统的输入输出变量。
现给出一系统模型为
z(k)-1.2z(k-1)+0.6z(k-2)=u(k-1)+0.5(k-2)+e(k)
e(k)=v(k)-v(k-1)+0.2v(k-2)
其中v(k)为随机信号,输入信号是幅值为1的M系列或随机信号,试用递推的极大似然法求系统辨识的参数Φ。
程序如下:
clear
a
(1)=1;b
(1)=0;d
(1)=0;u
(1)=d
(1);z
(1)=0;z
(2)=0;%初始化
fori=2:
1200%产生m序列u(i)
a(i)=xor(c(i-1),d(i-1));
b(i)=a(i-i);
c(i)=b(i-1);
d(i)=c(i-1);
u(i)=d(i);
end
u;
v=randn(1200,1);%产生正态分布随机数
V=0;%计算噪声方差
fori=1:
1200
V=V+v(i)*v(i);
end
V1=V/1200;
fork=3:
1200%根据v和u计算z
z(k)=1.2*z(k-1)-0.6*z(k-2)+u(k-1)+0.5*u(k-2)+v(k)-v(k-1)+0.2*v(k-2);
end
o1=0.001*ones(6,1);p0=eye(6,6);%幅初值
zf
(1)=0.1;zf
(2)=0.1;vf
(2)=0.1;vf
(1)=0.1;uf
(2)=0.1;uf
(1)=0.1;
%迭代计算参数值和误差值
fork=3:
1200
h=[-z(k


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 极大 辨识 及其 MTLAB 实现
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 (完整word版)信息论与编码期末考试题----学生复习用.doc
(完整word版)信息论与编码期末考试题----学生复习用.doc
-
(完整)六年级上册几何图形题.docx
-
(完整)储罐防腐施工方案.doc
-
(完整word版)公务员录用体检表.doc
-
(完整)八年级上册几何证明题专项练习.doc
-
(决策管理)投资决策委员会实施细则.doc
-
(完整)四年级上册口算、竖式计算、脱式计算.doc
-
(压轴题)初中物理八年级上册第一章《机械运动》检测(含答案解析)(2).doc
-
(完整)小学三年级心理健康教案.doc
-
(完整)初中文言文翻译技巧.doc
-
(名师整理)语文中考《骆驼祥子》名著导读优秀教案.docx
-
(完整word版)偏旁部首名称大全.doc
-
(人教PEP)五年级英语竞赛试题及答案.doc
-
(完整)山东省普通高中学生综合素质评价信息管理系统操作手册学生用户手册.doc
-
(完整word版)体育课教案模板.doc
-
(住宅楼方案)房屋建筑学课程设计说明书.doc
-
(完整word版)《分数的意义》优秀教学设计(公开课).doc
-
(完整word版)安全生产标准化实施方案.doc
-
(完整)初中生人物形象分析常用词汇.doc
-
(完整版)借用公司资质协议.doc
-
(完整word版)仙剑奇侠传三图文攻略(最详细版).doc
-
(完整word版)历年陕西省专升本英语真题(答案解析超全).doc
-
(完整)四年级四则混合运算训练题100道.doc
-
(完整word版)学校团总支部换届选举方案.doc
-
(完整word版)安全标准化绩效评定计划.doc
-
(完整)分布式光伏发电项目施工组织设计.doc
-
(完整版)埋地塑料管结构环刚度计算.doc
-
(完整版)国家农业产业强镇示范建设实施方案.doc
-
(完整版)八年级数学上几何典型试题及答案.doc
-
(完整版)六年级音乐下册人音版理论知识梳理.doc
-
(完整版)囚徒健身图文教程和计划表(完美打印版).doc
 (完整版)固定资产盘点表.xls
(完整版)固定资产盘点表.xls
-
镀膜作业基础培训Word文档格式.docx
-
最新LTE系统消息详细解析持续更新中Word格式.docx
-
宏观经济学阶段练习一及答案Word文档格式.docx
-
最新版离婚协议书新民法典Word格式.docx
-
餐饮企业董事会议事规则定稿版Word文档格式.docx
-
关于幼儿教师实习总结模板汇总8篇Word文档下载推荐.docx
-
第六章实验研究文档格式.docx
-
中国联通业务代理协议Word文档下载推荐.docx
-
最新最新人教版初中文言文全本文档格式.docx
-
油和水大班教案1Word格式.docx
-
在广电集团总结表彰大会上的讲话Word下载.docx
-
大众汽车甲壳虫虫爱一生主体促销活动策划书Word格式文档下载.docx
-
影响食品安全的主要因素及控制Word格式.docx
-
高速铁路接触网运行维护管理规程Word文档下载推荐.docx
-
初中物理绝对经典难题Word格式.docx
-
高考生物一轮复习专题13细胞的分化衰老凋亡与癌变练整理文档格式.docx
-
答案已定 马原1000机考题库Word文件下载.docx
-
初中物理液体压强题Word文档格式.docx
-
第二篇 建筑装饰构造技术教案0Word文件下载.docx
 人教版九年级数学上册全册完整课件优质PPT.pptx
人教版九年级数学上册全册完整课件优质PPT.pptx
- 苏教版八年级下册泰格特《窗》PPT格式课件下载.ppt
- 《唐雎不辱使命》ppt课件(50页)优质PPT.ppt
- 高教版中职英语(基础模块-第1册)Unit-9《Welcome-to-the-english-club》ppt课件1优质PPT.ppt
- 湖心亭看雪优秀课件(完整)PPT格式课件下载.ppt
- 影视广告创意策划(全)PPT推荐.ppt
- 光放大器课件PPT文档格式.ppt
- 中国农民工问题课件-共24页PPT文档格式.ppt
- 《古清凉传》成书的时代背景与撰着动机印顺文教基金会docWord文档下载推荐.docx
- 中国历代有多少个皇帝文档格式.docx