 智能控制课程设计模糊控制算法研究.docx
智能控制课程设计模糊控制算法研究.docx
- 文档编号:28481960
- 上传时间:2023-07-14
- 格式:DOCX
- 页数:12
- 大小:289.95KB
智能控制课程设计模糊控制算法研究.docx
《智能控制课程设计模糊控制算法研究.docx》由会员分享,可在线阅读,更多相关《智能控制课程设计模糊控制算法研究.docx(12页珍藏版)》请在冰豆网上搜索。
智能控制课程设计模糊控制算法研究
模糊控制算法研究
一、课程设计的目的:
1.通过本次课程设计,进一步了解模糊控制的基本原理、模糊模型的建立和模糊控制器的设计过程。
2.提高学生有关控制系统的程序设计能力;
3.熟悉Matlab语言以及在智能控制设计中的应用。
二、课程设计的基本内容:
假设系统的模型可以用二阶加纯滞后表示,即传递函数为
。
其中各参数分别为
。
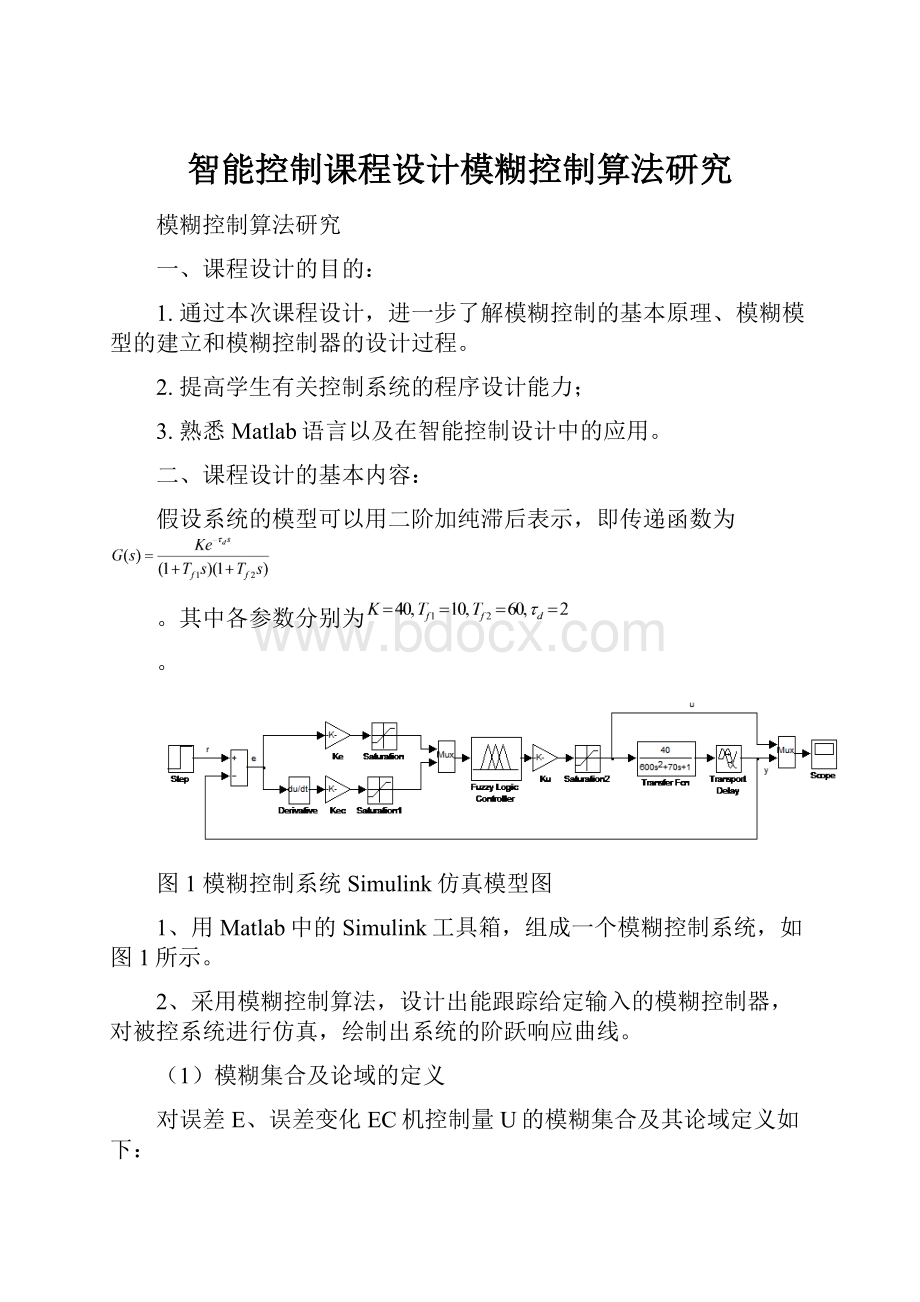
图1模糊控制系统Simulink仿真模型图
1、用Matlab中的Simulink工具箱,组成一个模糊控制系统,如图1所示。
2、采用模糊控制算法,设计出能跟踪给定输入的模糊控制器,对被控系统进行仿真,绘制出系统的阶跃响应曲线。
(1)模糊集合及论域的定义
对误差E、误差变化EC机控制量U的模糊集合及其论域定义如下:
E、EC和U的模糊集合均为:
{NB、NM、NS、0、PS、PM、PB}
E和EC的论域为:
{-6、-5、-4、-3、-2、-1、0、1、2、3、4、5、6}
U的论域为:
{-7、-6、-5、-4、-3、-2、-1、0、1、2、3、4、5、6、7}
上述的三个模糊集合都选取了7个元素,主要目的是着眼于提高稳态精度。
E、EC和U的隶属度函数图形如图2,3,4所示:
图2变量E的隶属度函数
图3变量EC的隶属度函数
图4变量U的隶属度函数
(2)模糊控制规则设计
模糊控制规则如下表所示:
表1模糊控制规则
E
U
EC
NB
NM
NS
0
PS
PM
PB
NB
PS
PS
PS
PS
PM
PB
PB
NM
NS
PS
PS
PS
PM
PM
PB
NS
NM
NS
0
0
PS
PM
PM
0
NB
NM
NS
0
PS
PM
PM
PS
NB
NM
NS
0
0
PS
PM
PM
NB
NB
NM
NS
NS
PS
PS
PB
NB
NB
NM
NS
NS
NS
PS
(3)系统的参数选择
系统所选用的参数为:
Saturation、Saturation1、Saturation2的范围分别为:
[-66]、[-66]、[-77],TransportDelay=2S。
通过调试得到PID模糊控制的参数:
Gain1=2.3,Gain=1.8,Gain2=0.07
(4)仿真结果:
系统的阶跃响应曲线如图5所示,其中上方的曲线代表系统的阶跃响应,下方的曲线是系统的模糊控制量的变化。
图5阶跃输入的响应曲线图
本设计中控制系统性能的要求为:
,
,
。
由图5中曲线可知:
符合要求
符合要求
符合要求
图6、系统开环传函的bode图
3、改变模糊控制器中模糊变量的隶属度函数,分析隶属度函数和模糊控制规则对模糊控制效果的影响。
比较那种情况下的控制效果较好。
如下图所示改变模糊控制器中的隶属度函数为梯形隶属函数。
图7变量E的隶属度函数
图8变量EC的隶属度函数
图9变量U的隶属度函数
此时系统的阶跃响应曲线为:
图10系统的阶跃响应曲线
由图10中曲线可知道:
由以上的仿真结果可以看出梯形隶属度函数的系统性能没有三角形隶属度函数的系统性能好。
此时系统的超调量变大,上升时间增大,稳态误差变大。
4、给系统加上扰动,观察此时的阶跃响应曲线,看系统是否仍然稳定,并与无扰动情况下的阶跃响应曲线进行比较。
并比较模糊控制和PID控制的鲁棒性。
(1)加扰动时的模型图如图11所示(其中step1为幅值为0.02的阶跃信号)。
图11加扰动后的系统模型图
系统的阶跃响应曲线为:
图12系统的阶跃响应曲线
由图12中曲线可知道:
超调量变大
符合要求
稳态误差变小
分析:
由数据可知,系统加上扰动之后,系统仍然是稳定的,系统性能指标变化不大,说明有着良好的鲁棒性。
究其原因,在Saturation2之前加的扰动,相当于被控制对象的输入量在对应时刻又并联了一个输入,从而在对应的各个时刻相当于
增益变大;显而易见,
的增大,有助于系统的稳定,但是会使超调量变大。
调整时间变小,与实验的结果是吻合的。
5、改变系统的参数,了解模糊控制在系统参数发生变化时的控制效果。
并与PID控制器作用下系统参数发生变化时的控制效果进行比较,思考模糊控制相对于传统控制的优点。
(1)当系统开环增益k分别取k=35,k=40和k=45时系统的阶跃响应如图13所示。
图13系统开环增益变化对系统阶跃响应的影响
(2)当系统纯延时
分别取
、
和
时系统的阶跃响应如图14所示。
图14系统纯滞后时间变化对系统阶跃响应的影响
(3)当系统惯性时间常数
分别取
、
和
时系统的阶跃响应如图15所示。
图15系统较大的时间常数变化对系统阶跃响应的影响
从图13可以看出增大K值,系统的上升时间减小,此时超调量稍有增加;从图14可以看出当系统的纯滞后时间增大时,系统的超调量增加较大。
从图15可以看出系统的惯性时间常数增大后使系统动态性能有所降低,当时间常数T2增大时上升时间增大,但超调量有所降低。
三、模糊控制的优点
通过本设计可以知道,模糊控制具有能够得到良好的动态响应性能,并且不需要知道被控对象的数学模型(当然本实验中是已知道的),适应性强,上升时间快,鲁棒性好。
与PID控制相比有着很大的优势,采用PID控制虽然稳态性能较好,但是难以得到满意的动态响应性能,并且鲁棒性差。
当然,模糊控制也有着自身的缺点,容易受到模糊规则等级的限制而引起误差,需要进一步改进。
四、总结
通过这次《模糊控制算法研究》课程设计增加了对模糊调节器的理解,认识到了模糊控制器的优缺点。
并进一步熟练了用Matlab中Simulink工具箱的应用,提高了自己的动手能力。
通过这次课程设计也使我认识到对Matlab中Simulink工具箱的应用还不够熟练,将来应该加强操作、学习。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 智能 控制 课程设计 模糊 算法 研究
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
班主任开学的几项工作Word文档下载推荐.docx
-
《微型机原理与应用》奥鹏东师网考题库正确答案Word下载.docx
-
施工升降机卸料平台搭设方案Word文档格式.docx
-
银行授信政策Word下载.docx
-
花卉超市计划书Word文档下载推荐.docx
-
山东省科普教育基地申报书文档格式.docx
-
安达市长征小学校三年级上册英语期末测验无答案Word格式.docx
-
就业力训练慕课答案Word格式.docx
-
集美大学web编程技术课程教学大纲 1Word文档下载推荐.docx
-
Unit1Thekingsnewclothes教案新译林版Word文件下载.docx
-
0402243计算机软件基础一试题及答案文档格式.docx
-
优秀实习生发言稿多篇范文Word格式文档下载.docx
-
五年级上册语文试题5678单元词语闯关及课文内容梳理 人教新课标Word文档格式.docx
-
某酒店夜总会筹备与经营计划书doc 18页Word文件下载.docx
-
余学才周建华老师拟开放的题目Word格式文档下载.docx
-
中大管院MBA提面面试真题Word文档下载推荐.docx
-
简单祝福短信Word格式文档下载.docx
-
套期保值经典案例十个Word格式文档下载.docx
-
江苏省南京市鼓楼区中考二模英语试题及答案Word格式.docx
