 第六章电力系统暂态稳定分析.docx
第六章电力系统暂态稳定分析.docx
- 文档编号:28854366
- 上传时间:2023-07-20
- 格式:DOCX
- 页数:134
- 大小:836.34KB
第六章电力系统暂态稳定分析.docx
《第六章电力系统暂态稳定分析.docx》由会员分享,可在线阅读,更多相关《第六章电力系统暂态稳定分析.docx(134页珍藏版)》请在冰豆网上搜索。
第六章电力系统暂态稳定分析
第六章电力系统暂态稳定分析
6。
1概述
在正常的稳态运行情况下,电力系统中各发电机组输出的电磁转矩和原动机输入的机械转矩平衡,因此所有发电机转子速度保持恒定。
但是电力系统经常遭受到一些大干扰的冲击,例如发生各种短路故障,大容量发电机、大的负荷、重要输电设备的投入或切除等等。
在遭受大的干扰后,系统中除了经历电磁暂态过程以外,也将经历机电暂态过程。
事实上,山于系统的结构或参数发生了较大的变化,使得系统的潮流及各发电机的输出功率也随之发生变化,从而破坏了原动机和发电机之间的功率平衡,在发电机转轴上产生不平衡转矩,导致转子加速或减速。
一般悄况下,干扰后各发电机组的功率不平衡状况并不相同,加之各发电机转子的转动惯量也有所不同、使得各机组转速变化的情况各不相同。
这样,发电机转子之间将产生相对运动,使得转子之间的相对角度发生变化,而转子之间相对角度的变化乂反过来影响各发电机的输出功率,从而使各个发电机的功率、转速和转子之间的相对角度继续发生变化。
与此同时,苗于发电机端电压和定子电流的变化,将引起励磁调节系统的调节过程;山于机组转速的变化,将引起调速系统的调节过程;山于电力网络中母线电压的变化,将引起负荷功率的变化:
网络潮流的变化也将引起一些其他控制装置(如SVC、TCSC、直流系统中的换流器)的调节过程,等等•所有这些变化都将直接或间接地影响发电机转抽上的功率平衡状况.
以上各种变化过程相互影响,形成了一个以各发电机转子机械运动和电磁功率变化为主体的机电暂态过程。
电力系统遭受大干扰后所发生的机电暂态过程可能有两种不同的结局。
一种是各发电机转子之间的相对角度随时间的变化呈摇摆(或振荡)状态,且振荡幅值逐渐衰减,各发电机之间的相对运动将逐渐消失,从而系统过渡到一个新的稳态运行悄况,各发电机仍然保持同步运行。
这时,我们就称电力系统是暂态稳定的。
另-种结局是在暂态过程中某些发电机转子之间始终存在着相对运动,使得转子间的相对角度随时间不断增大、最终导致这些发电机失去同步。
这时称电力系统是暂态不稳定的。
当一台发电机相对于系统中的其他机失去同步时,其转子将以高于或低于需要产生系统频率下电势的速度运行,旋转的定子磁场(相应于系统频率)与转子磁场之间的滑动将导致发电机输出功率、电流和电压发生大幅度摇摆,使得一些发电机和负荷被迫切除,严重惜况下其至导致系统曲解列或瓦解.
电力系统正常运行的必要条件是所有发电机保持同步。
因此,电力系统在大干扰下的稳定性分桥,就是分析遭受大干扰后系统中各发电机维持同步运行的能力,常称为电力系统的暂态稳定分析。
上述对电力系统的暂态稳定分析通常仅涉及系统在短期内(约10s之内)的动态行为,然而有时我们还必须分析系统的中期(10s直至儿分钟)和长期(儿分钟直至儿十分钟)动态行为,这就涉及到电力系统的中期和长期稳定性分析.
中期和长期稳定性主要关注在遭受到严重破坏时电力系统的动态响应。
当电力系统遭受到严重破坏时,将导致系统的电压、频率和潮流发生重大偏移,因此必然涉及到一些在短期暂态稳定分析时未曾考虑的慢过程、控制及保护的行为。
对电压和频率发生大的偏移起作用的装置,其响应过程从儿秒(如发电机控制与保护装置的响应)到儿分钟(如原动机能量供应系统和负载电压调节器等装置的响应)。
进行长期稳定性分析的重点是与大范围系统破坏同时发生的较慢的、持续时间长的现象。
以及山此引起的发电机与负荷的有功功率和无功功率显著的持续性失配。
这些现象包括:
锅炉的动态,水轮机的进水口和水管功态,自动发电控制(AGC),电厂和输电系统的控制与保护,变压器饱和,负荷和网络的非正常频率效应等。
长期稳定通常关心系统对特大干扰的响应,这些干扰不属于正常系统设讣准则的预想事故。
在这种情况下,可能引发连锁事故及系统被分离成儿个孤立的子系统。
这时稳定分析要回答的问题是如何在负荷损失的情况下各孤岛能达到可以接受的平衡状态。
中期响应是指短期响应向长期响应的过渡。
中期稳定研究的重点是各机之间的同步功率振荡,包括一些慢现象以及可能的大的电压和频率偏移
电力系统遭受大干扰是人们所不希望的,但事实上乂是无法避免的。
系统在遭受大干扰后失去稳定的后果往往非常严重,其至是灾难性的。
事实上电力系统遭受到的各种大干扰,诸如短路故障。
大容量发电机、大的负荷、重要输电设备的投入或切除等都是以一定的概率随机地发生,因此系统的设计、运行方式的制定总是需要保证系统在合理选择的预想事故下能够保持稳定,而不能要求电力系统能承受所有干扰的冲击。
山于各国对系统稳定性的要求不同,因此对预想事故的选择也就有不同的标准.我国对系统稳定性的要求反映在《电力系统安全稳定导则》⑴中。
判断电力系统在预想事故下能否稳定运行,需要进行暂态稳定分析。
当系统不稳定时。
还需要研究提高系统稳定的有效措施:
当系统发生重大稳定破坏事故时,需要进行事故分析,找出系统的薄弱环节,并提出相应的对策。
下面首先讨论电力系统暂态稳定分析所用全系统数学模型的构成IL2-4-6'25:
.在电力系统稳定分析中,各元件所采用的数学模型,不但与稳定分析结果的正确性直接相关,而且对稳定分析的复杂性有很大的影响。
因此,选用适当的数学模型描述各元件的特性,使得稳定分析的结果满足合理的精度要求并且计算简单,是电力系统稳定分析中一个至关重要的问题•对于包含众多发电机、输电线路、负荷及各种控制装置的实际电力系统.考虑到任何冲击后果的复朵性,使得各元件的建模遇到很大的困难。
所幸的是,各种现象时间常数的明显差别允许我们把注意力集中在影响暂态过程的关键元件和所研究区域.
在进行电力系统稳定分析时,山于在遭受干扰后电力网络的电磁暂态过程衰减很快,因此忽略其暂态过程是合理的.采用这种简化后,电力网络的模型中就仅包含代数方程•另外,在发电机定子电压方程中,0匕和P匕反映了定子绕组本身的暂态过程,忽略这两项,意味着忽略了定子中的直流分量,因此定子中仅包合基频电气分量,定子电压方程也就变成代数方程。
很明显,同时忽略发电机定子和电力网络的暂态过程,能够使得定子电压方程和网络方程保持一致,即均为代数方程,且仅包含基频电气分量,因而可以用稳态关系式描述,这样做显然还使全系统微分方程的数LI大大减少,从而可提高系统稳定分析的效率。
山于系统中所有的电气量在交流系统中是基波交流分量的有效值,故可用相量描述(用大写字母表示);在直流系统中是直流分量的平均值.描述各元件电压、电流关系的方程都为代数方程(和潮流计算中的稳态方程相同);山于系统中动态元件的存在,一些电气量表现出一定的动态特性。
因此,在遭受干扰后,电力系统经历的整个暂态过程可以看成是各时刻的稳态量(正弦交流量)按一定动态特性的过渡,这时系统中的电压、电流、功率能够发生突变.这就是电力系统稳定分析常用的准稳态模型(Quasi—steadystateModel)o
(1)电力网络方程,即描述在公共参考坐标系x—y下节点电压与节点注入电流之间的关系.
(2)各同步发电机定子电压方程(建立在各自的d-q坐标系下)及d-q坐标系与x-y坐标系间联系的坐标变换方程。
(3)各自流线路的电压方程。
(4)负荷的电压静态持性方程等。
根据对计算结果精度要求的不同,可依据所研究问题的性质,本着抓住重点、忽略次因素的原则使用相应复杂程度的元件数学模型。
口前,电力系统暂态稳定分析方法基本分为两种。
第一种方法是数值积分方法,乂称间接法/-a】,其基本思想是用数值积分方法求出描述受扰运动微分方程组的时间解,然后用各发电机转子之间相对角度的变化判断系统的稳定性。
数值积分法山于可以适应各种不同详细程度的元件数学模型。
且分析结果准确、可靠,所以得到了广泛的实际应用,并一直作为一种标准方法来考察其他分析方法的正确性和精度。
II询,利用数值积分法进行电力系统暂态稳定分析已经相当成熟,并已有许多商业性程序相继问世。
如我国电力科学研究院编制的《交直流电力系统综合计算程序》,由BPA根据美国WSCC标准开发的暂态稳定分析程序。
PTI开发的PSSE,美国EPRI的ETMSP,TRACTEBEL/EDF开发的EUROSTAG,巴西CEPEL的ANATE21及联邦德国的VISTA程序(30;和比利时的STAG程序等。
这些程序除可用于分析故障后转子的摇摆过程外,还可用于各种动态行为分析,它们已成为规划和运行人员进行离线暂态稳定分析、安全备用配置、输电功率极限估计的有力工具.
另一种方法是直接法,它不需要求解微分方程组,而是通过构造一个类似于“能量”的标量函数,即李雅普诺夫函数,并通过检查该函数的时变性来确定非线性系统的稳定性质,因此它是一种定性的方法。
山于构造李雅普诺夫函数比较困难,因此U前电力系统暂态稳定分析的直接法仅限于比较简单的数学模型,或用暂态能量函数近似李雅普诺夫函数,因此其分析结果尚不能令人完全满意。
本章首先介绍暂态稳定分析中全系统数学校型的构成和微分-代数方程组的数值求解方法,然后叙述各动态元件与电力网络的连接以及网络操作及故障的处理方法。
接着对简单模型和带有FACTS元件的详细模型下的电力系统暂态稳定
分析算法分别进行了详细论述•最后介绍暂态稳定分析的直接法。
6.2暂态稳定分析数值求解方法125】
电力系统的暂态稳定分析可以归结为微分一代数方程组的初值问题.本节我们首先介绍常微分方程的数值解法,然后讨论微分一代数方程组的数值解法,最后给出暂态稳定分析的基本流程。
6.2。
1常微分方程的数值解法〔小~16]
1.基本概念
考虑一阶微分方程
(6-3)
一般地讲,上式中f是x、t的非线性函数。
在很多工程实际问题中,函数f中不显含时间变量f,因此往往表现为以下的形式:
(6-4)
在电力系统稳定计算中,所有微分方程都不显含时间变量t。
当式(6-4)中的f为t的线性函数时,可以很容易地得到微分方程解的解析表达式。
例如,对微分方程式
(6-5)
可以求出它的通解为
工=曲(6-6)
式中:
A为积分常数。
式(6-6)表示了一个曲线族.
根据初始条件曲。
)f°可以确定x随t变化规律的一条曲线例如,当a-(0)=1时,从式(6—6)即可确定积分常数4=1,这样就得到了确定的解(或积分曲线)
力=才(6-7)
工程实际问题所表现出来的微分方程比较复杂,其函数往往是多元非线性的,因此一般不能用解析的形式求出像式(6-6)那样的通解,而只能用数值解
法.即从已知的初始状态a=f°,x=“)开始,利用某种数值积分公式离散地逐点
求出时间序列tn=t.+nh,,7=1,2,...(h为步长)相对应的函数的近似值:
心o对微分方程的这种数值解法称为逐步积分法.
以下我们以欧拉法为例子说明逐步积分法的基本概念。
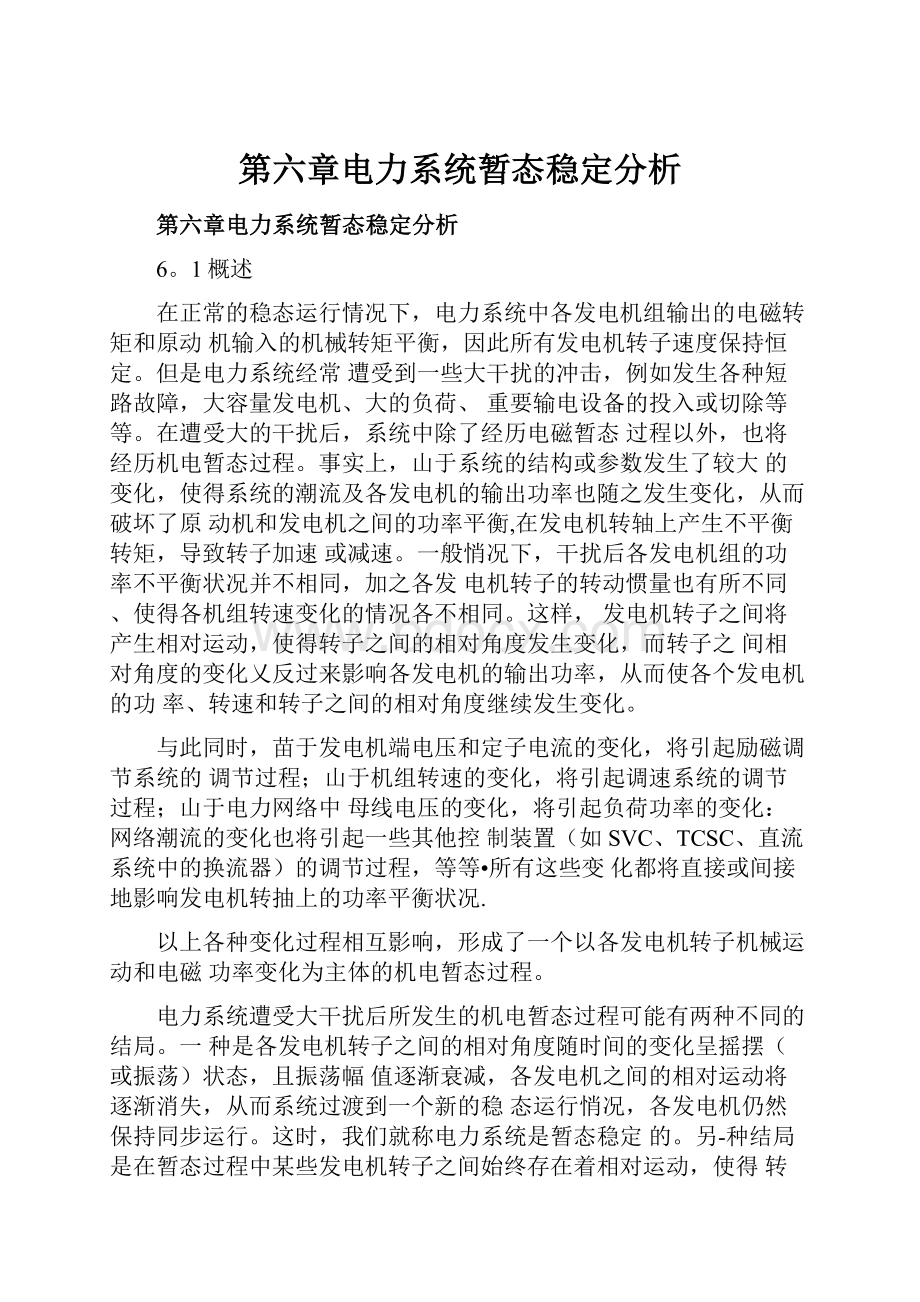
设一阶微分方程式(6—3)在:
.山=0、x(r0)=时的准确解为
工=・⑴(6-8)
这一函数曲线,即微分方程式(6-3)通过点(0,X。
)的积分曲线如图6-2所
/J'so
图⑺2欧拉法求解过程示意图
欧拉法乂称为欧拉切线法或欧拉折线法。
它的基本思想是将积分曲线用折线来代替,而每段直线的斜率都由该段的初值代入式(6-3)求得.具体推算步骤如下:
对于第一段,在点(O,xo)处曲线的斜率为
将第一段曲线用斜率为半的直线段来代替,则可以求出耳=力(h为步长)时x
的增量为
(I
因此在tx=h处,X芙蓉近似值应为
djr1
力1=血+ZU1=工0十着|h
对于笫二段,积分曲线将用另一段直线来代替,其斜率山该段的初值[即该段的起始点(」山)]代入式(6・3)而得,即
韶S由)
这样便可以求岀在匚=2//处x的近似值
如图6-2所示•这样继续下去乂可以推算出心处函数近似值心,等等。
一般.
对于笫n+1点函数值的递推公式为
(6-9)
n+1Xn+1)时
现在我们来分析利用这个递推公式由(tn,Xn)点推算(t
带来的误差。
为此可把积分函数式(6・8)在该点展开为泰勒级数
如—+文嗨+…卄普
(6-10)
式中:
心、X;…分别为积分函数对自变量t的一阶导数、二阶导数……在『=匚点的值直为区间[tn,tn+1]中的某一数*『为泰勒级数的余项。
当取r=2时,式(6
-10)变为
或者写成
这里:
;仍为区间[Mn+i]中的某一数,一般?
;K务o
显然,忽略式(6—⑵中余项匚匕以后就得到欧拉法的递推公式(6—
9).因此,在山n点推算n+1点函数值时所引起的误差为
(6-13)
设整个计算的区间】0,tm]内,=的最大值为M,则误差Ew应满足
(6-14)
式中:
卜1值与步长h的选择无关。
式(6—13)、式(6-14)中的误差En+i是由n点推算n十1点函数值时引起的误差,称为局部截断误差。
欧拉法的局部截断误差与h?
成比例,通常说它的局部截断误差是。
(力彳)阶的。
应该指出,在计算心+1以前,兀也是用同一递推公式求得的,所以兀本身就有误差,因此在用式(6-9)计算心+(时,除了忽略余项而引起的局部截断误差以外,还应加上心误差的影响。
这个误差叫做全局截断误差或简称截断误差,因此,由于欧拉法递推公式不精确而引起的误差要比式(6—13)、式(6-14)所表示的局部截断误差大。
可以证明,欧拉法的全局截断误差是和步长h成比例的,或者说它是。
(〃)阶的。
山以上讨论可以看出,为了减小欧拉法的汁算误差,应该选择较小的步长h。
但绝不能III此得到步长愈小则计算误差愈小的结论,因为在以上的讨论中,我们完全没有考虑计算机本身由于有效位数的限制而引起的舍入误差。
当取较小步长h时,将使运算量成反比地增加,从而使舍入误差的影响加大。
如图6-3所示,图中码m为最小误差所对应的步长,因此,我们不能单单用缩小步长的方法来减小误差。
当计算精度要求较高时,必须选择更完善的讣算方法。
最小溟差
图6竹误差与步长的关系
在以上欧拉法的讣算过程中,当计算tn+l点的函数值时,仅需利用它的前一点tn处的函数值,这种方法称为单步法。
本节介绍的方法都属于这一类。
与此对应的是多步法(或多值法),这类方法的精确度较高,它在推算点的函数值xn+1时需要利用冃|J而几点的数据:
Un,X"),(C(_1,X".J,,Xn-k-¥\)-
2o改进欧拉法
在应用欧拉法时,由各时段始点计算出的导数值半=/(心心)被用于dtn
心,tn+订的整个时段,即代替积分曲线的各折线段的斜率仅由相应时段的始点决定,因而给计算造成较大的误差。
如果各折线段斜率取该时段始点导数值与终点导数值的平均值,我们就可以期望得到比较精确的汁算结果。
改进欧拉法就是根据这个原则提出来的计算方法。
对于一阶微分方程式(6-3),设给定初值为山=0时x(r0)=x0,以下介绍改进欧拉法的具体步骤。
为了求t严h时的函数值",首先用欧拉法求坷的近似值
式中:
d工
dt
当xf由式(6—15)求得以后,即可将八,f代入式(6—3)求出该时段末导数的近似值
dxdri
dx
然后就可以用空和気
dt
(0)
的平均值来求“改进值
(6-16)
.dx
(0)
d?
I
这样求得的山⑴比单纯用欧拉法求得的山⑹更接近微分方程的正确解山,其
儿何解释如图6—4所示。
当由亿,心)点推算亿十叫J点时,递推公式的一般形式为
ir
忑广
dr
dt
(6<7)
djr
忑+i=£¥】=xn+~
<□)
由式(6・17)中第二式及第四式消去心,可将第四式改写为
(0}.djr
nil
(6■⑻
'兀+1=爼r+1+dr
式中:
drrt
1!
dF
这样,也可以把改进欧拉法的递推公式归结为以下形式:
cLr!
ck|?
I
(6-19)
1d乂丁亠=九+不
=41+L)
I]2\
当应用式(6—19)计算兀曲时,其形式与理;的公式具有相向的形式,因此可以简化程序,并且在求得兀籍以后不必再记忆心,因此也节省了内存单元。
以下讨论改进欧拉法递推公式的局部截断误差。
为此,仍需要利用式(6-10)的泰勒级数展开式A2A3
ei=兀十十于;—+f77
/!
”3!
式中「埠为泰勒级的余项。
改进欧拉法递推公式(6-17)中第四式可以改写为
+-])
将式(6-17)中第一式代入上式,可得
(6-21)
云¥1=几十y十y/(^+y,A,t,t+A)
把上式中右端笫三项按泰勒级数展开:
+尤‘山+人)一寺/(无1昇“)十与銮亠牛普+0(胪》
因为
十兽
所以
h1f9
兀扌g+公/仏+方〉=㊁工―十十0(护)
将上式代入式(6—21)中,则得
器]=血十疋/+*;y+Q(fy3)(6-22)
再把上式与式(6-20)相减,可知
Eh1=-Tn+1f云¥1=远‘770〈胪)
因此,改进欧拉法的局部截断误差。
(胪)阶。
同样可以证明改进欧拉法的全局截
断误差是。
(/产)阶的。
【例6・1]用改进欧拉法求解微分方程
其初值为t()=0,x0=lo
【解】步长取0・2。
计算结果见下表:
反z
0,fi
0-8
kO
站67
0
1・1866?
I.)866/
0.34959
7669
1.34832
0.?
54*9
。
・6
6990
0
?
270
1.49372
U79
O.fJ
5513
0
6703
1.62788
2.62790
amsco
1.75690
】・0
6185
631a
1-75430
1.75430
丄
di 十 Qdi I 这一微分方程的准确解为 丄=+] 当t=l时,x=l.73205,故误差为 11-73205-1-75431=0.0225 d/driYdr 其初始值为心, 改进欧拉法也可以用来求解一阶微分方程组•例如,对于微分方程组 (6-23) 心,y0o当选定步长h以后,对于第一时段可以求出变量的近似值为 式中: dz d7 再由y;°)求岀 dF (“〉 一盅QU) dt 这样,函数在t点的值应为 dr di =比+— +业(odr1 2叫+diIo =M+ 不I/1 式中: 。 —丄 艸dj; ! ■■■ 击 L—2 1岀 “1 1 击 1—2 & 1dt 0丿 以此类推。 山递推公式(6—17)可以看出,改进欧拉法计算一个时段所需要的运算过比欧拉法大一倍,但是如果步长一样,改进欧拉法的计算精确度却比欧拉法高。 如上所述,改进欧拉法的截断误差是。 (斥)阶的,而欧拉法是0(/"阶的。 如图6・5所 示,当容许误差为6时,改进欧拉法容许步长几和欧拉法步长几相差不大,在这种情况下,用改进欧拉法的运算量比欧拉法要大。 当容许误差为£2时,改进欧拉法的容许步长力2比欧拉法步长心相对大得多,显然肖心>2%时,改进欧拉法的总运算量比欧拉法要小. 3。 龙格■■库塔法 改进欧拉法用[tn,tn+l]区间两点的导数(或斜率)推算Xn+1,拟合了积分函数泰勒级数的询三项,从而使局部截断误差达到了。 (胪)阶。 这就启发人们去考虑: 是合可利用[tn,t„+l]区间上更多点的导数去推算X„+I,以便拟台泰勒级数更多的项数? 结论是肯定的。 龙格■库塔法就是基于这种原理建立起来的微分方程数值解法。 最常用的是四阶龙格一库塔法,这种方法用[tn,tn+l]区间四个点的导数去推算,从而拟合了泰勒级数的询五项: 文卄I=斗十x\h+工"”jy+工严—+卅卷+0(疋) 因此,它的局部截断误差是0(於)阶的.其全局截断误差是。 (〃4)阶的。 对于一阶微分方程式(6-3).当利用四阶龙格■库塔法求解时,可以利用递推公式 (6-24) 欧丄I=兀十*(屁+2kz+2k.+&)岛=hjXnj爲=研竝+号,匚+¥I為—M耳+务,爲十号 H=h八九Ik3ytn+A) 求出X],x2,x3,.... 【例6-2]用四阶龙格•库塔法求解例6-1中的一阶微分方程 【解】步长取力=0.2.计算过程及结果如下表所示: tr. h "三 h mT乎 走3 “丄" ■島 0 1 0.2 0.1 l・】 0.1S36364 0・E )・0918182 C.1817274 <1.2 I,)81杪 - 0.1686心 0.2 biai2202 0・3 I-26? 6.]SA393li L262他 Oe1571990 0,4 1・3"? 2« 0、118Wt 0.d ].2狎嚴8 0-119078e U.S LI16026 0.皿0188 0・5 IQ12GTG 0.】403RD0 0. 〕•佃262? 0.1346ni>6 O.G X4832BJ 0.131832B 0.? LSSI)JOT 0.)295? 86 0.7 i-518070' 0<12«743G O.R J.61202.5 0.1238970 1.612513 r«.1240515 9.9 l・R454] 0.1H昭dD o.g I.A72175 H92432 l・0 1.731759 a115372& 1 U722141 由以上计算结果可知,当采用龙格-库塔法时,函数值在21时x=1.732141,和准确解相比,其误差为 丨1.73205一1.732141丨=0.00009 和例6—1相比精确度提高很显著。 应用龙格-库塔法也可以求解一阶微分方程组•例如,对于式(6-23)所示的微分方程,可按以下递推公式进行计算: 兀+i=心+•”俎十Zk2十2ki+為) =必+十Zlz4-21<+厶) 式中: k\=力 层—十y+%人十y(爲=Virn4-号宀+乡,乙+~j怎=九/1(%+島,乳4-厶M”+A) h=丘九(几,%,匚)' 厶=A/2|文”4-养*+-g,“十yI A 厶=A/2[^+J小+j&+yI 打=&A(才”+期,”+4並+h) 龙格-库塔法的精度较高,但运算量较大,为欧拉法的4倍。 LI前,当精度要求较高时,已逐步趋向于采用运算量较小的多步法来代替龙格一库塔法。 龙格一库塔法往往只作为多步法起步时的一种辅助计算方法。 4.隐式积分法 微分方程数值解法可以分为显式解法与隐式解法两大类。 U前所介绍的方法都属于显式解法。 分析它们的计算公式(6—


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第六 电力系统 稳定 分析
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
全国市级联考广东省佛山市届高三下学期教学质量检测二生物试题解析版Word文档格式.docx
-
口袋妖怪漆黑的魅影隐藏物品所在Word格式.docx
-
某工程双排扣件式钢管落地脚手架文档格式.docx
-
山东省德州市某中学届高三月考 地理Word文档格式.docx
-
钳工锯割锉削教案文档格式.docx
-
设备验证设计确认DQ验证文件模板Word文档下载推荐.docx
-
度全国优秀城乡规划设计奖.docx
-
食品购销合同书范本5篇Word格式.docx
-
人教课标版小学数学二年级上册全册导学案新Word格式文档下载.docx
-
发给员工的表扬信五个样本文档.docx
-
电影《了不起的盖茨比》观后感范文大全五篇修改版.docx
-
三年级下册环境教育教案Word格式.docx
-
数学知识点陕教版八年级思想品德上册全册教案1总结Word下载.docx
-
湾头镇镇长叶浩述职Word格式文档下载.docx
-
双轴支护施工组织设计文档格式.docx
-
电机修理合同标准版范本.docx
-
五大民生关键词Word格式文档下载.docx
-
武林立志传详细攻略Word文档格式.docx
-
数值分析实验报告Word格式.docx
