 悬挂运动控制系统报告.docx
悬挂运动控制系统报告.docx
- 文档编号:29959279
- 上传时间:2023-08-03
- 格式:DOCX
- 页数:14
- 大小:102.51KB
悬挂运动控制系统报告.docx
《悬挂运动控制系统报告.docx》由会员分享,可在线阅读,更多相关《悬挂运动控制系统报告.docx(14页珍藏版)》请在冰豆网上搜索。
悬挂运动控制系统报告
悬挂运动控制系统设计与总结报告
摘要:
本系统以宏晶科技的16位单片机STC89C52RC为控制核心,通过对所需运动的轨迹曲线的参数方程,并对两组步进电机采用一定的算法进行控制,实现悬挂画笔在给定范围内的定点运动、直线运动、圆心定点的半径为5厘米的圆周运动等功能。
关键词单片机算法步进电机
1方案设计与论证
根据题目的设计要求,本设计主要实现勾画设定轨迹并能实时的显示物体中画笔所在位置坐标。
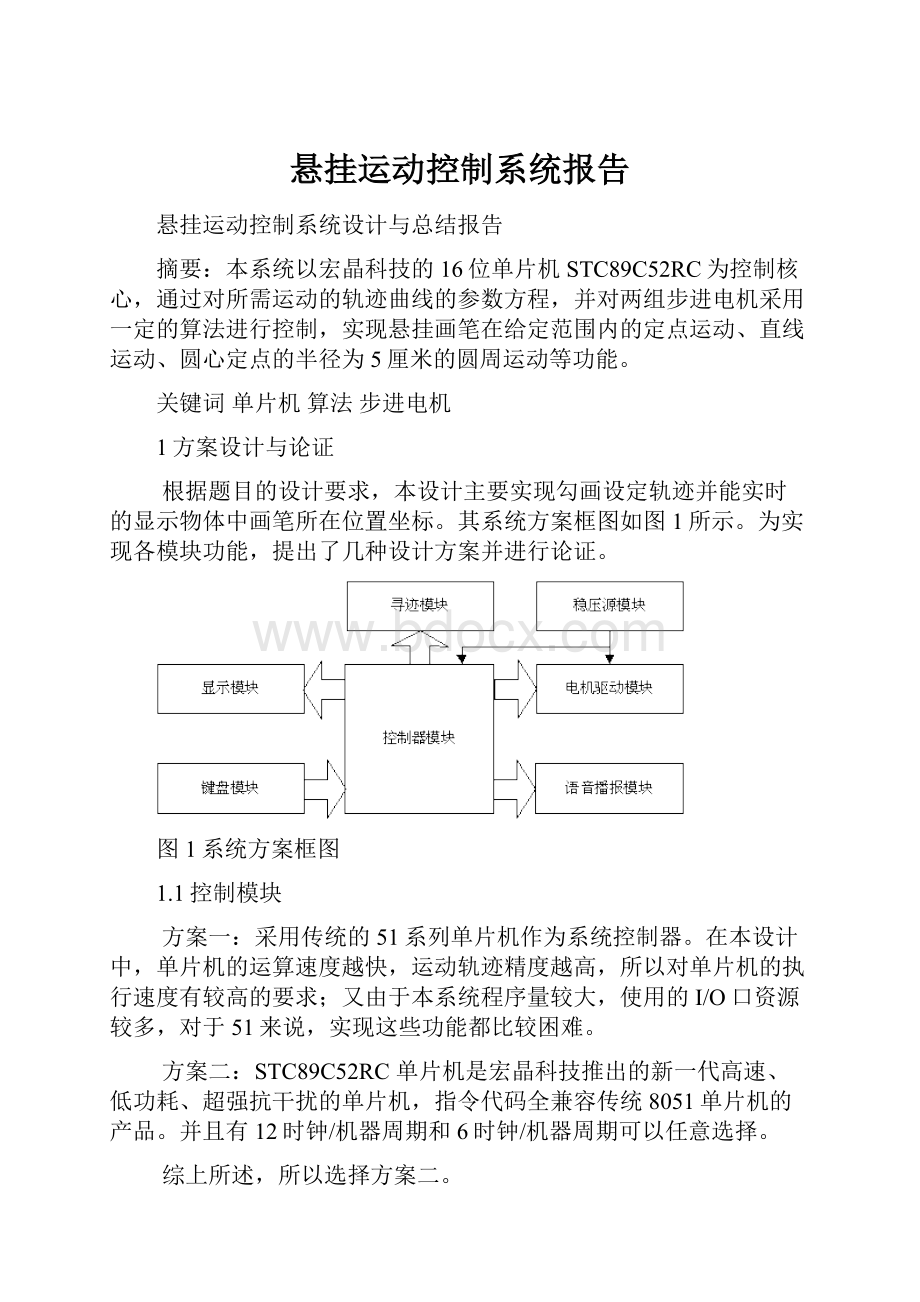
其系统方案框图如图1所示。
为实现各模块功能,提出了几种设计方案并进行论证。
图1系统方案框图
1.1控制模块
方案一:
采用传统的51系列单片机作为系统控制器。
在本设计中,单片机的运算速度越快,运动轨迹精度越高,所以对单片机的执行速度有较高的要求;又由于本系统程序量较大,使用的I/O口资源较多,对于51来说,实现这些功能都比较困难。
方案二:
STC89C52RC单片机是宏晶科技推出的新一代高速、低功耗、超强抗干扰的单片机,指令代码全兼容传统8051单片机的产品。
并且有12时钟/机器周期和6时钟/机器周期可以任意选择。
综上所述,所以选择方案二。
1.2电机驱动模块
方案一:
采用一般的直流电机,但是直流电机电枢绕组转动惯量大,比同功率交流电机转动惯量大几倍,相对不容易控制,导致精确度下降。
方案二:
采用步进电机。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
综上所述,所以选择方案二。
1.3液晶显示模块
方案一:
采用数码管显示。
数码管作为一种应用十分普遍的显示器件,可以在各种各样的设备上见到。
数码管适合用在对价格、亮度、等条件比较敏感,同时基本上只要显示数字量的时候,用的比较多。
但是没有驱动要加CD4511等外加电路,就显得比较繁琐了。
方案二:
采用1602LCD液晶显示。
1602内部集成有显示芯片,可以识别英文字母、阿拉伯数字和日语片假名等,液晶显示画质高且不会闪烁。
1602是数字式接口,采用并口传输,速度比数码管快。
1602体积小、重量轻、低能耗。
综上所述,所以选择方案二。
1.4掉电存储模块
24C02有一个16字节页写缓冲器,该器件通过I2C总线接口进行操作有一个专门的写保护功能。
为了防止数据的丢失,所以在总的设计过程中添加这个模块。
以便更好的实现所需的功能。
2理论分析与计算
2.1硬件设计
系统电路连接及硬件资源分配。
本系统硬件电路连接图见图2.1。
图2.1 系统电路连接图
2.2软件理论分析与计算
2.2.1位移/脉冲转换方法
给步进电机一定频率的脉冲,使电机拖动一载体移位100cm,记录下此期间所给脉冲总数z,由此则步进电机拉动载体位移1mm所需的脉冲数
(注意给定的频率不要太高,否则会出现丢步。
多测几次,取脉冲数相近的那个脉冲数z),因此,直接可将拉线的位移转化为送给电机的脉冲个数。
脉冲的频率决定转速,脉冲个数决定位移。
2.2.2点到点运动核心算法
结合图2.2.2说明,
假设E(x0,y0),F(x1,y1)为给定平面范围上的任意两点,作辅助线(图中虚线部分),
在直角三角形⊿ABE中
a0=
在直角三角形⊿CDE中:
b0=
同理对于F点,两拉线长分别为:
a1=
b1=
因此当悬挂物从E点运动到F点时:
电机1的收放线长度为c(当c<0,电机正转(或拉线伸长);c>0时,电机反转(或拉线收缩))
c=a0-a1
电机2的收放线长度为d(当d<0,电机反转(或拉线收缩),当d>0时,电机正转(或拉线伸长))
d=d0-d1
根据c,d的正负分别确定电机1,电机2的正反转向。
而根据c,d的绝对值来确定电机1,电机2各自所需的脉冲数:
电机1所分配的脉冲数:
电机2所分配的脉冲数:
图2.2.2点到点运动示意图
2.2.3画圆轨迹核心算法
本设计要求悬挂物能够画一个圆,而本系统是圆心定点的半径为5厘米的圆周运动,所画圆的圆心坐标为(10,5)半径为的5厘米,(x,y)为圆周上的任意一点,由此确定圆的方程为:
(x-10)^2+(y-5)^2=5^2
若直接使用该方程来求圆上点的坐标,算法比较复杂,所以采用点到点的方法,把圆理论上份成32个点这样就可以画出32边形,以此类推,如果能把圆分成无数个点的话,那就能近似的看成是一个圆了。
这是运用的微分的思路。
这样就可以采样到圆上均匀的点,显然在圆周上取得点越多,控制也会更精确。
2.2.4误差补偿
该算法可能会造成电机所送的脉冲数与理论计算脉冲数稍有偏差,因此加入适当的补偿程序,使得所运行轨迹精度更高,曲线更平滑。
3单元电路设计与计算
3.1电源部分电路设计
本系统中使用了两相混合式步进电机,其额定工作电流达到2.0A,采用一般的电源无法提供持续的稳定电流。
所以自制了一个可选择的电源,有-15V,-12V,-5V,0V,+5V,+12V,+15V,以及能在0V到5V之间可调的电源。
扩大后的电流达到2.0A以上,满足系统电机驱动电流的要求。
3.2掉电存储部分电路设计
24C02是用I2C总线驱动的外部2K容量储存芯片E2PROM,掉电后可以保存数据。
为了防止数据的丢失,以及在进行下一次测试时能方便的观察数据,所以设计这个模块。
掉电存储器24C02的电路连接图见图3.2。
图3.2掉电存储器24C02的电路连接图
3.3显示模块设计
在系统中,利用通用的液晶1602作为显示模块实时显示寻迹或者定点的坐标。
液晶1602的技术参数为:
◆显示容量:
32个字符,每个字符为5×7点阵,分2行,每行16列
◆芯片工作电压:
4.5-5.5V
◆工作电流:
2mA(5.0V)
◆模块最佳工作电压:
5.0V
◆字符尺寸:
2.95×4.35(W×H)mm
其典型应用接口图如图3.3。
本系统中DB0~DB7连接SPCE061A的IOA0~IOA7,EP连接IOA8,R/W连接IOA9,RS连接IOA10。
图3.31602与单片机典型接口
3.4键盘模块电路设计
根据设计需求,本系统中使用了标准的4×4键盘,其电路原理图如图3.4.1。
图中C1~C4为4×4键盘的列信号,L1~L4为4×4键盘的行信号。
在本系统中,用IOB4~IOB7连接键盘的列信号C4~C1;用IOB0~IOB3连接键盘的行信号L4~L1。
图3.4.1 4×4键盘电路原理图
在本系统中,S1~S3、S5~S7、S9~S11、S13为数字键,如图3.4.2,S4、S8、S12、S14~S16为功能键。
图3.4.2 4×4键盘功能图
3.5步进电机电路设计
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
本系统采用的是步进电机24BYJ48,八拍运行时一个脉冲转过3.75°说明这个电机的基本步距角是7.5°,电机转子是12齿的。
八拍工作方式是半步运行。
步距角=360°/(12°X8)=3.75°。
在本系统中对步进电机采用的是L298N电机驱动,驱动电路图如3.5.1所示。
图3.5.1电机驱动L298N
4程序设计
4.1主程序
本系统软件设计采用宏晶科技的16位单片机STC89C52RC的汇编语言与C语言交叉使用,可固化、可剪裁,以实现系统所要求的各项功能。
系统软件主程序流程图如图4.1所示:
图4.1主程序流程图
4.2定点运动子程序
通过对步进电机的控制,使悬挂物从初始位置运动到指定点流程图如图4.2所示:
图4.2定点运动子程序流程图
4.3画圆子程序
根据圆的方程计算圆上点的坐标,通过调用定点程序来实现,画圆程序流程图如图4.3所示:
图4.3画圆子程序
4.4掉电存储子程序
为防止数据的丢失,以及对上次操作的可延续性,通过调用掉电存储子程序来实现,掉电存储子程序如图4.4所示:
图4.4掉电存储子程序
5系统测试
5.1测试指标
将设计题目所要求的各基本功能和发挥部分进行分项测试。
5.2测试仪器
测试使用的仪器设备如表5.2所示:
表5.2测试使用的仪器设备
序号
名称、型号、规格
数量/台
备注
1
数字万用表:
VC9806
1
胜利公司
2
微机稳压电源:
WD-4
1
启东计算机总厂
3
双踪示波器DS1102CA
1
北京普源
4
米尺
1
-
5
秒表
1
-
5.3定点运动测试
首先设定物体所要到达的一个点的坐标,控制物体总左下角原点出发,在规定时间内较好的完成了题目要求。
表5.3是多次测试的纪录。
表5.3定点运动测量数据
序号
设定坐标(x,y)
实际测量
误差/cm
其他发挥
1
25.00,25.00
24.80,24.80
0.20~0.50
掉电存储
2
20.00,20.00
19.80,19.70
0.23~0.45
掉电存储
3
15.00,15.00
14.80,14.40
0.24~0.38
掉电存储
5.4圆周运动测试
首先设定圆心坐标,根据给定半径,单片机控制物体运动到画圆的起始位置,开始画圆。
经测试所画圆的最大轨迹误差为0.5厘米。
经过多次测试完成良好。
表5.4圆周运动测量表
测试次数/次
设定圆心坐标(X,Y)
画笔位置坐标显示情况
完成情况
误差/cm
其他发挥
1
10.00,5.00
实时显示
良好
0.10
掉电存储
2
10.00,5.00
实时显示
良好
0.10
掉电存储
3
10.00,5.00
实时显示
良好
0.10
掉电存储
6结论
本系统以宏晶科技的16位单片机STC89C52RC为控制核心,先进行掉电存储的判断,通过对所需运动的轨迹曲线的参数方程,并对两组步进电机采用一定的算法进行控制,实现悬挂画笔在给定范围内的定点运动、直线运动、圆心定点的半径为5厘米的圆周运动等功能。
本系统还可以通过外接键盘来设定坐标,通过液晶显示模块直观的体现出来。
掉电存储部分还可以记录上次的数据,不至于丢失。
可以更好的实现本系统的功能。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 悬挂 运动 控制系统 报告
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
组织文化研究方案文献综述.docx
-
英语高考英语试题下载北京卷Word版无答桉.docx
-
数学基础综合考试大纲学科教学.docx
-
妻子在婚姻中的角色和责任.docx
-
各国的安全认证.docx
-
工厂实习报告15篇精华版.docx
-
初三化学中考总复习知识点汇总人教版九年级.docx
-
春秋版八年级上学期期中考试道德与法治试题II卷新版.docx
-
关于工业用地转为商业用地的申请报告.docx
-
八年级信息技术下册 第一单元教案.docx
-
茶艺大赛规则.docx
-
纺织英语.docx
-
初级保健按摩师国家职业标准完整版.docx
-
外管线检查井井盖丢失应急预案.docx
-
内控知识考试道多选题题目及答案.docx
-
校对基础知识培训.docx
-
波斯帝国的专制与集权.docx
-
等高线地形图及其剖面图.docx
-
污染源在线监测项目技术方案.docx
