 随机迷宫生成算法浅析.docx
随机迷宫生成算法浅析.docx
- 文档编号:30738113
- 上传时间:2023-08-20
- 格式:DOCX
- 页数:18
- 大小:73.96KB
随机迷宫生成算法浅析.docx
《随机迷宫生成算法浅析.docx》由会员分享,可在线阅读,更多相关《随机迷宫生成算法浅析.docx(18页珍藏版)》请在冰豆网上搜索。
随机迷宫生成算法浅析
摘要
本文对随机迷宫生成进行了初步的研究和分析,并给出了两种不同的生成算法。
最终的算法结合了图的深度优先遍历。
通过对比两种算法之间,可发现,在实际问题中,结合了离散数学的方法往往非更有效率且效果更佳。
关键词:
随机地图生成(randommazegenerating)、深度优先遍历(depth-firstsearch)
1.引言
在平常的游戏中,我们常常会碰到随机生成的地图。
这里我们就来看看一个简单的随机迷宫是如何生成。
2.迷宫描述
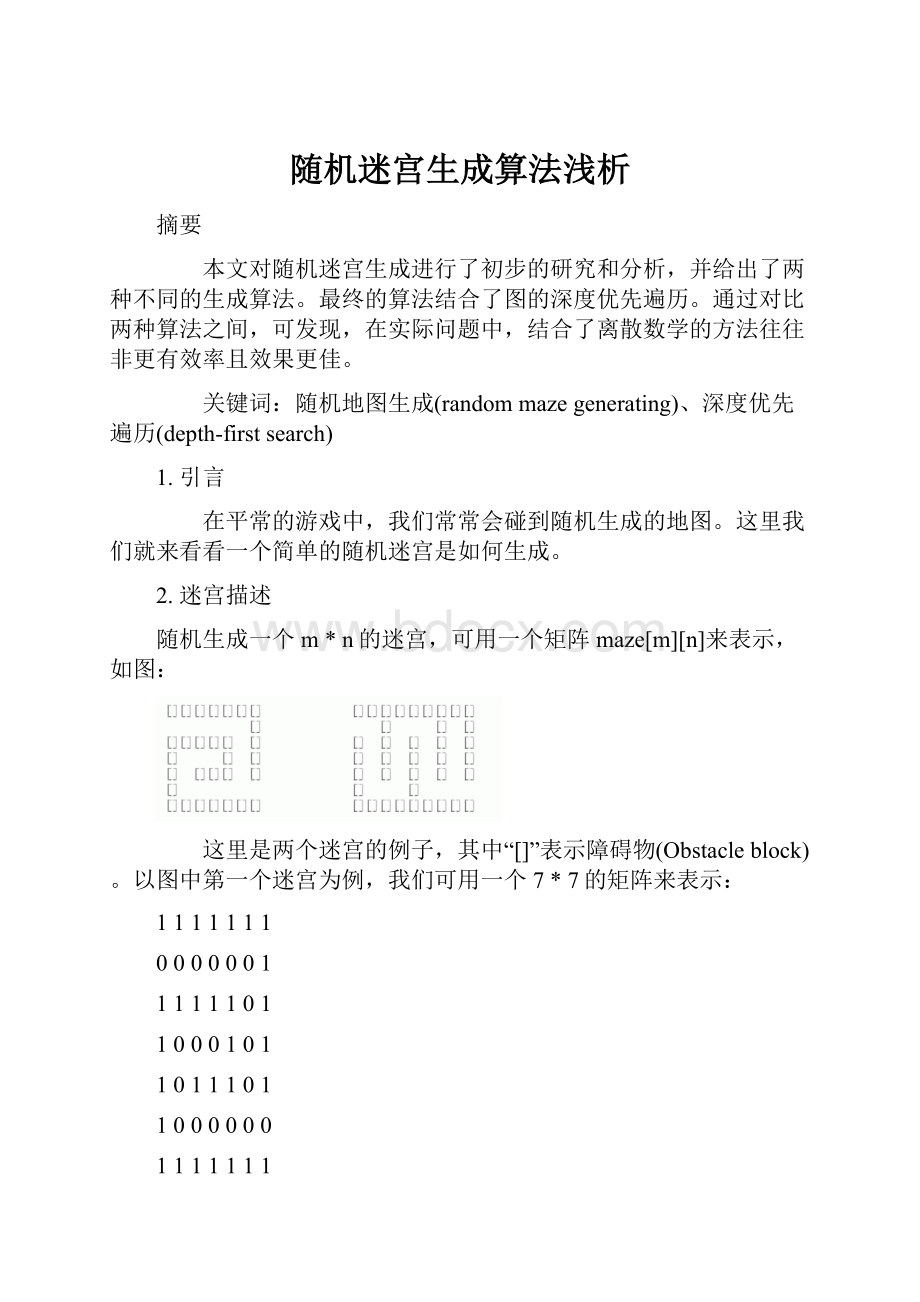
随机生成一个m*n的迷宫,可用一个矩阵maze[m][n]来表示,如图:
这里是两个迷宫的例子,其中“[]”表示障碍物(Obstacleblock)。
以图中第一个迷宫为例,我们可用一个7*7的矩阵来表示:
1111111
0000001
1111101
1000101
1011101
1000000
1111111
(0–可移动;1–障碍物)
3.迷宫生成算法
随机生成迷宫的方法有很多,这里介绍两种,第一种是作者没有结合离散知识所想出的方法;第二种是作者同学结合了离散数学后所采用的方法。
3.1一种简单的迷宫生成算法
假定起点在左上角,终点在右下角。
方法就是:
从起点开始,随机选择一个方向移动,一直移动到终点,则移动的路径便是迷宫的路径。
移动过程中要保证路径不要相交,不要超出边界。
下面用图例具体演示一下实现的步骤。
以下用BlueBlock代表障碍物(obstacleblock),WhiteBlock代表可移动区域(blankblock)。
先假设整个迷宫都为BlueBlock(初始点、结束点除外)。
一、当有多个方向都有可能变为WhiteBlock时,需要随机选取一个方向,这就是随机迷宫的来源,如图:
(这时,有下、左、右,三种可选的方向)
二、这里,我们假设随机选了右作为路径的下一步。
判断某一方向(黄点)是否可变为WhiteBlock,只要这一块都周围有三块为BlueBlock就可行,这样就保证了不会出现路径相交的情况,如图:
(绿点有且仅有一个)
三、如果产生到了一个死胡同(红点),则需回退一格(绿点),再重复上面的步骤,如图。
当然,为了实现这要求,需要一个已通过路径的表(PathList),依次记录所产生的WhiteBlock的坐标,当走入死胡同时,只需pop掉最后一个坐标(设为n),这现在表中最后一个坐标(n-1)即为所需要的。
上面是基本的思路,但有一个问题:
如果出现如下情况,如图,则路径表会将所有的元素pop掉,而永远到不了出口。
(永远到不了终点)
解决方案
双路径搜寻,即从入口、出口同时搜寻路径,如图。
由于产生那种情况需要WhiteBlock越过对角线(如上图,这里是左下角、右上角),所以双路径搜寻可以解决问题(问题没有出现的机会)。
以上是通过很直接的思考方式得来的随机迷宫之实现。
3.2结合图论的迷宫生成算法3.2.1图的深度优先遍历简介
例如,要遍历上面这个图
采取深度优先算法(从1开始)
准备一个Stacks,预定义三种状态:
A未被访问B正准备访问C已经访问
一、访问1,把它标记为已经访问,然后将于它相邻的并且标记为未被访问的点压入s中并标记为正准备访问
此时系统状态:
已经被访问的点:
1
还没有被访问的点:
34678910
正准备访问的点:
25(存放在Stack之中)
二、从Stack中拿出第一个元素2,标记为已经访问,然后将与它相邻的并且标记为未被访问的点压入s中并标记为正准备访问,如图:
此时系统状态:
已经被访问的点:
12
还没有被访问的点:
4678910
正准备访问的点:
35(存放在Stack之中)
三、从Stack中拿出第一个元素3,标记为已经访问,然后将于它相邻的并且标记为未被访问的点压入s中并标记为正准备访问,如图:
此时系统状态:
已经被访问的点:
1234
还没有被访问的点:
8910
正准备访问的点:
765(存放在Stack之中)
依此类推,重复上面的动作,直到Stack为空,即所有的点都被访问。
最后可能的遍历情况,如图:
3.2.2深度优先遍历之迷宫生成算法
那么,这样该如何生成迷宫呢?
不知大家注意到了没有,这种算法每一个步骤都要执行一个操作,把刚刚访问过的点的相邻的并且没有标记为被访问过的点压入Stacks中,然后下一步访问的就是Stack中的第一个元素。
那么,当一个点有多个相邻点的话,该按什么顺序压入呢?
随机。
这就是随机生成迷宫的核心所在!
现在我们换个角度看待问题。
例如需要生成一个5*5的迷宫。
坐标为(1,1)(3,1)(1,3)(3,3)的①、②、③、④分别代表节点,它们肯定可让人通过,然后,如果(2,1)设置成可通过,就代表①?
②可通过,结合图的遍历算法,我们看到,当我们从①访问到②时,就把(2,1)设置为可通过,就相当开辟了一条道路,等到遍历结束,迷宫就生成了。
上图中的①②③④,我们可看为一个2*2的矩阵,如图:
关键是在什么时候“开辟这条道路”。
以上节中图的深度优先遍历简介为例子。
假设依次访问到的点是:
12347109865
当刚刚访问到9时,会把86压入Stack中,所以应该开通9到8和6的道路,这样就可自动生成迷宫了。
3.2.3迷宫路径的唯一性
这个算法,大家应该很清楚地看到,从起点到终点的路是唯一的(可以任选两点作为起点和终点)
3.2.4算法的缺点
算法只能生成一个m*n的迷宫,其中m、n都是奇数。
4.两个算法的对比分析
方法一生成的迷宫:
方法二生成的迷宫:
很显然,结合了深度优先遍历(Depth-firstsearch)的算法生成的迷宫要细致许多。
5.结论
通过对一个简单问题的分析,可以看到,要将离散数学的方法与实际的具体问题相结合,可真正发挥出离散数学的威力。
当然,如何将理论与实践相结合,那还需要个人自己去体味。
本文仅起抛砖引玉的作用。
两种迷宫生成算法技术文章2011-02-2311:
18:
26阅读228评论0字号:
大中小订阅.
这里要介绍两种迷宫生成的算法,RecursiveBacktracking和Eller’sAlgorithm。
它们都生成的是Perfectmaze,也就是说每个区域都连通,并且没有环的迷宫。
我们现在说Recursivebacktracking:
迷宫的初始状态是墙壁都存在。
选择一个开始区域。
随机得选择一个没有访问过的邻接区域,并打通与它之间的墙壁。
此邻接区域称为当前区域。
如果所有周围的区域都是访问过的,则退回上一个区域进行挖据墙壁,一直重复。
当开始的区域被退回的时候,算法结束。
重新生成
Eller’sAlgorithm是个节省内存的算法,在迷宫宽度固定的情况下,它能够使用固定的内存生成无限的迷宫。
它一行一行的生成迷宫,并且生成当前行的时候,只考察上一行的数据。
步骤如下:
首先是第一行,将每个区域分别放入一个集合。
当然区域之间的墙壁都是存在的。
如果相邻的两个区域不在同一个集合,则随机得打通它们之间的墙壁(随机意味着可以打通也可以不打通)。
并且合并它们所在的集合,表示它们之间都是连通的。
对于每个区域,随机的向下打通墙壁。
并且每个集合至少要有一个区域打通向下的墙壁。
生成下一行区域,并且将相应的区域(正好上面那个区域打通了向下的墙壁的)合并到上一行的集合。
其它区域则将在它们自己的集合。
这一步骤很关键,在这里可以舍弃上上行的数据了,也就是刚才的集合中只要包含上一行和当前行的区域。
重复直至生成最后一行。
对于随后一行,打通所有不在同一个集合的邻接区域,并忽略所有向下的墙壁。
一个在图像生成迷宫的代码技术文章2011-02-2216:
35:
04阅读996评论5字号:
大中小订阅.
一个在图像上随机生成迷宫图,粉红色代表围墙。
代码如下,
HANDLECImageWaterMarkTest:
:
ImageMaze(HANDLEhImage)
{
if(hImage==NULL)
{
WriteLog(TRA_LEVEL_WARN,_T("CImageWaterMarkTest:
:
ImageMaze,Imageisnull"));
returnNULL;
}
HANDLEhNewImage=NULL;
inti,j;
intnScale=8;
BITMAPINFOHEADERds;
memcpy(&ds,hImage,sizeof(ds));
inteffwdt=((((ds.biBitCount*ds.biWidth)+31)/32)*4);
intnPad=effwdt-(((ds.biWidth*ds.biBitCount)+7)/8);
BYTE*pbBits=(BYTE*)hImage+*(DWORD*)hImage+ds.biClrUsed*sizeof(RGBQUAD);
WriteLog(TRA_LEVEL_DEBUG,_T("CImageWaterMarkTest:
:
ImageMaze,Pic'swidth=%d,height=%d"),ds.biWidth,ds.biHeight);
longlWidth=ds.biHeight/nScale;//
longlHeight=ds.biWidth/nScale;
if(lWidth<4||lHeight<4)
{
WriteLog(TRA_LEVEL_WARN,_T("CImageWaterMarkTest:
:
ImageMaze,Maze'ssizeissosmall"));
returnNULL;
}
BYTE*Maze=newBYTE[lWidth*lHeight];
CreateMaze(Maze,lHeight-2,lWidth-2,lHeight,lWidth);
intw,h;
if(ds.biBitCount==8)
{
for(i=0;i { for(j=0;j { for(intr=0;r { for(intc=0;c { h=i*nScale; w=j*nScale; if(Maze[i*lWidth+j]==0) { pbBits[(ds.biHeight-h-r)*effwdt+w+c]=0; } else { //pbBits[(h+r)*effwdt+w+c]=255; } } } } } } elseif(ds.biBitCount==24) { m_ipFramework->ShowProgressCtrl(); for(i=0;i { for(j=0;j { for(intr=0;r { for(intc=0;c { h=i*nScale; w=j*nScale; if(Maze[i*lWidth+j]==0) { pbBits[(ds.biHeight-h-r)*effwdt+(w+c)*3]=0; pbBits[(ds.biHeight-h-r)*effwdt+(w+c)*3+1]=0; pbBits[(ds.biHeight-h-r)*effwdt+(w+c)*3+2]=255; } else { //pbBits[(h+r)*effwdt+w+c]=255; } } } } m_ipFramework->SetPosProgressCtrl(int((i+1)*100/lHeight)); } m_ipFramework->SetPosProgressCtrl(100); m_ipFramework->HideProgressCtrl(); } else { WriteLog(TRA_LEVEL_WARN,_T("CImageWaterMarkTest: : ImageMaze,nosupportthisformat")); } delete[]Maze; returnhNewImage; } //maze的实际大小是外围加一圈既,m+2,n+2 voidCreateMaze(BYTE*maze,intm,intn,intnRows,intnCols) { inti,j; //intm,n;//迷宫行,列 srand(time(0)); for(i=1;i<=m;i++) { for(j=1;j<=n;j++) { maze[i*nCols+j]=2; //maze[i][j]=rand()%2; //scanf("%d",&maze[i][j]); } } //设置起点和终点 intnStartm,nStartn;//入口 nStartm=1; nStartn=1; maze[nStartm*nCols+nStartn]=0; intnEndm,nEndn;//出口 nEndm=m; nEndn=n; maze[nEndm*nCols+nEndn]=0; printf("你建立的迷宫为o(∩_∩)o...\n"); for(i=0;i<=m+1;i++)//加一圈围墙 { maze[i*nCols]=1; maze[i*nCols+n+1]=1; } for(j=0;j<=n+1;j++) { maze[0*nCols+j]=1; maze[(m+1)*nCols+j]=1; } intnCount=0; intdx[4]={0};//下标: 0-上,1-下,2-左,3-右 intdy[4]={0}; //初始化路径 intnRdm=nEndm; intnRdn=nEndn; intnFindm=nEndm; intnFindn=nEndn; while(nFindm>=1&&nFindn>=1) { nCount=0; dx[0]=0; dy[0]=0; if(nFindm-1==nStartm&&nFindn==nStartn)//当前位置的'上'节点是入口 { break; } elseif(maze[(nFindm-1)*nCols+nFindn]==2)//||maze[nFindm-1][nFindn]==0)//加入待查节点 { dx[0]=nFindn; dy[0]=nFindm-1; nCount++; } dx[1]=0; dy[1]=0; if(nFindm+1==nStartm&&nFindn==nStartn)//当前位置的'下'节点是入口 { break; } elseif(maze[(nFindm+1)*nCols+nFindn]==2)//||maze[nFindm+1][nFindn]==0)//加入待查节点 { dx[1]=nFindn; dy[1]=nFindm+1; nCount++; } dx[2]=0; dy[2]=0; if(nFindm==nStartm&&nFindn-1==nStartn)//当前位置的'左'节点是入口 { break; } elseif(maze[nFindm*nCols+nFindn-1]==2)//||maze[nFindm][nFindn-1]==0)//加入待查节点 { dx[2]=nFindn-1; dy[2]=nFindm; nCount++; } dx[3]=0; dy[3]=0; if(nFindm==nStartm&&nFindn+1==nStartn)//当前位置的'右'节点是入口 { break; } elseif(maze[nFindm*nCols+nFindn+1]==2)//||maze[nFindm][nFindn+1]==0)//加入待查节点 { dx[3]=nFindn+1; dy[3]=nFindm; nCount++; } if(nCount==0)//没有上一节点存在 { nRdn--; nRdm--; /*if(nRdn==0) { nRdm--; nRdn=nEndn; }*/ nFindm=nRdm; nFindn=nRdn; continue;//待调试 } //选择下一个节点 intnSelected=rand()%nCount; for(intk=0,i=-1;k<4;k++) { if(dx[k]>0&&dy[k]>0)//有效的待查点 { i++; } if(i==nSelected)//随机选中的节点 { nFindm=dy[k]; nFindn=dx[k]; maze[nFindm*nCols+nFindn]=0; break; } }/* for(k=0;k<4;k++) { if(maze[dy[k]][dx[k]]==2) { maze[dy[k]][dx[k]]=1; } }*/ } }


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 随机 迷宫 生成 算法 浅析
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
春节广播稿.docx
-
辞职报告怎写精选5篇辞职报告怎么写.docx
-
大学英语视听说3听力原文翻译Unit2.docx
-
档案法律法规知识学习材料.docx
-
达达搜员工手册最新.docx
-
道路救援服务细则.docx
-
低氧训练动物模型海拔高度氧浓度地选择.docx
-
地下工程防水论文.docx
-
第13课《古诗两首》.docx
-
胆囊炎 胆石症与情志相关.docx
-
党政办公室工作总结.docx
-
北京青少年学生校外教育资源与整合与开发结题研究报告.docx
-
道德与法治教学工作计划一年级.docx
-
道歉老婆的道歉信.docx
-
北京市顺义区初三中考一模语文试题word版含答案.docx
-
地产别墅市场定位报告.docx
-
北邮计算机网络实验二协议数据的捕获和解析.docx
-
地质填图实习报告.docx
-
第二章工程规范内装定稿.docx
