 Vector control motor.docx
Vector control motor.docx
- 文档编号:3274820
- 上传时间:2022-11-21
- 格式:DOCX
- 页数:44
- 大小:217.68KB
Vector control motor.docx
《Vector control motor.docx》由会员分享,可在线阅读,更多相关《Vector control motor.docx(44页珍藏版)》请在冰豆网上搜索。
Vectorcontrolmotor
Vectorcontrol,alsocalled field-orientedcontrol (FOC),isa variable-frequencydrive (VFD)controlmethodwherethe stator currentsofa three-phase ACelectricmotor areidentifiedastwoorthogonalcomponentsthatcanbevisualizedwithavector.Onecomponentdefinesthemagneticfluxofthemotor,theotherthetorque.Thecontrolsystemofthedrivecalculatesfromthefluxandtorquereferencesgivenbythedrive'sspeedcontrolthecorrespondingcurrentcomponentreferences.Typically proportional-integral(PI)controllers areusedtokeepthemeasuredcurrentcomponentsattheirreferencevalues.The pulse-widthmodulation ofthevariable-frequencydrivedefinesthe transistor switchingaccordingtothestatorvoltagereferencesthataretheoutputofthePIcurrentcontrollers.[1]
FOCisusedtocontrolthe AC synchronous and inductionmotors.[2] Itwasoriginallydevelopedforhigh-performancemotorapplicationsthatarerequiredtooperatesmoothlyoverthefull speed range,generatefull torque atzerospeed,andhavehighdynamicperformanceincludingfast acceleration anddeceleration.However,itisbecomingincreasinglyattractiveforlowerperformanceapplicationsaswellduetoFOC'smotorsize,costand powerconsumption reductionsuperiority.[3][4] Itisexpectedthatwithincreasingcomputationalpowerofthemicroprocessorsitwilleventuallynearlyuniversallydisplacesingle-variable scalar volts-per-Hertz (V/f)control.[5][6]
Contents
[hide]
∙1 Developmenthistory
∙2 Technicaloverview
∙3 Applicationrecap
∙4 Seealso
∙5 References
Developmenthistory[edit]
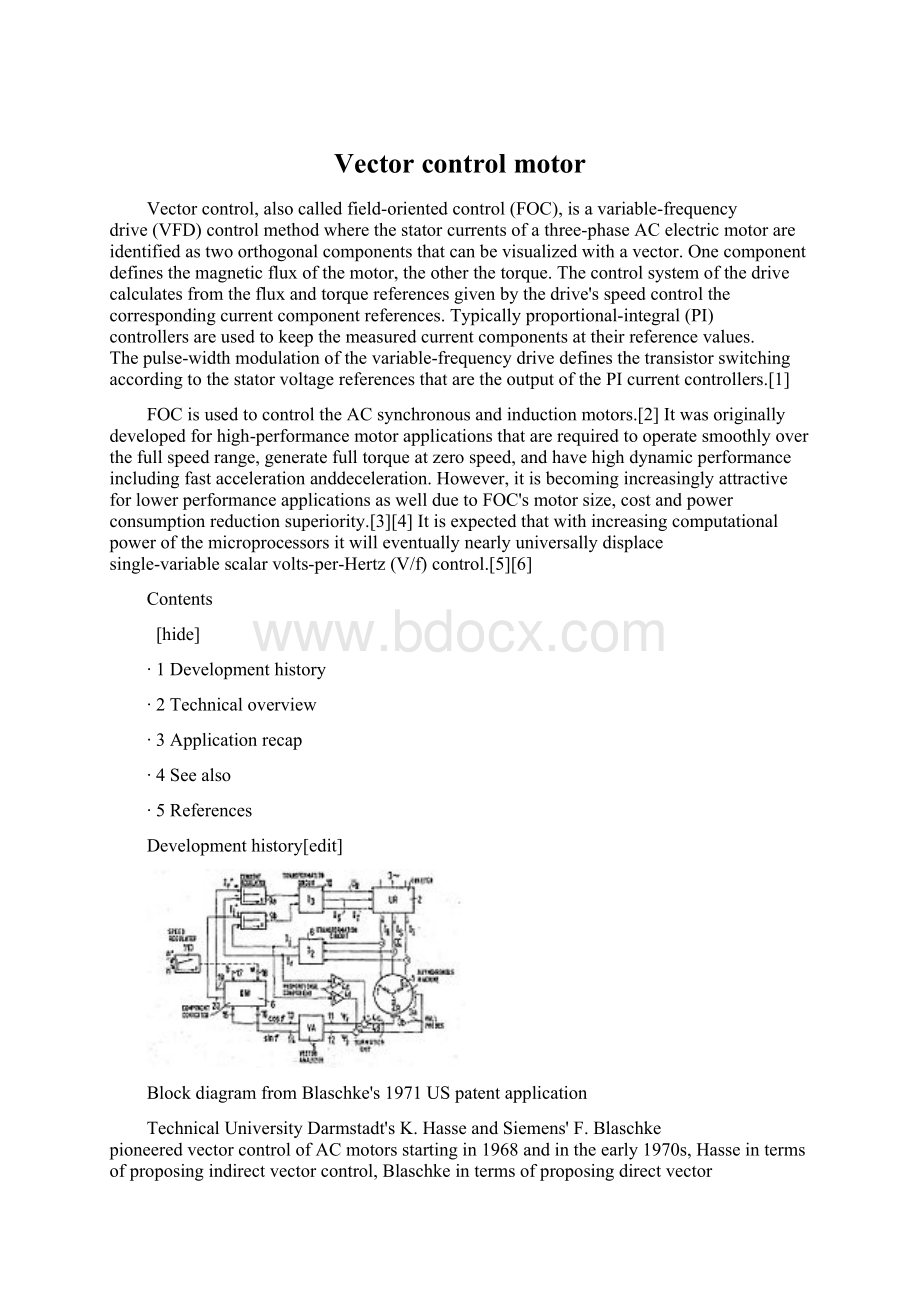
BlockdiagramfromBlaschke's1971USpatentapplication
TechnicalUniversityDarmstadt'sK.HasseandSiemens'F.Blaschkepioneered vector controlofACmotorsstartingin1968andintheearly1970s,Hasseintermsofproposingindirectvectorcontrol,Blaschkeintermsofproposingdirectvectorcontrol.[7][8] TechnicalUniversityBraunschweig'sWernerLeonhardfurtherdevelopedFOCtechniquesandwasinstrumentalinopeningupopportunitiesfor ACdrives tobeacompetitivealternativeto DCdrives.[9][10]
Yetitwasnotuntilafterthecommercializationof microprocessors,thatisintheearly1980s,thatgeneralpurposeACdrivesbecameavailable.[11][12] BarrierstouseofFOCforACdriveapplicationsincludedhighercostandcomplexityandlowermaintainabilitycomparedtoDCdrives,FOChavinguntilthenrequiredmanyelectroniccomponentsintermsofsensors,amplifiersandsoon.[13]
The Parktransformation haslongbeenwidelyusedintheanalysisandstudyof synchronous andinductionmachines.ThetransformationisbyfarthesinglemostimportantconceptneededforanunderstandingofhowFOCworks,theconcepthavingbeenfirstconceptualizedina1929paperauthoredby RobertH.Park.[14] Park'spaperwasrankedsecondmostimportantintermsofimpactfromamongallpowerengineeringrelatedpaperseverpublishedinthetwentiethcentury.ThenoveltyofPark'sworkinvolveshisabilitytotransformanyrelatedmachine'slinear differentialequationsetfromonewithtimevaryingcoefficientstoanotherwithtime invariant coefficients.[15]
Technicaloverview[edit]
OverviewofkeycompetingVFDcontrolplatforms:
VFD,withsensororsensorless
Scalarcontrol
V/f(VoltsperHertz)control
Vectorcontrol
DTC(Directtorquecontrol)
DSC(Directself-control)
SVC(Spacevectormodulation)
FOC(Field-orientedcontrol)
DirectFOC
IndirectFOC
SignalFlowGraph(SFG)forInductionMotor
SFGEquations
(d,q)CoordinateSystemSuperimposedonThree-PhaseInductionMotor[16]
SimplifiedIndirectFOCBlockDiagram [3] [17][18]
SimplifiedDirectFOCBlockDiagram [19]
SensorlessFOCBlockDiagram [20][21]
WhiletheanalysisofACdrivecontrolscanbetechnicallyquiteinvolved("Seealso"section),suchanalysisinvariablystartswithmodelingofthedrive-motorcircuitinvolvedalongthelinesofaccompanying signalflowgraph andequations.[20]
Invectorcontrol,anACinductionorsynchronousmotoriscontrolledunderalloperatingconditionslikeaseparately excited DCmotor.[22] Thatis,theACmotorbehaveslikeaDCmotorinwhichthefieldfluxlinkage and armature fluxlinkagecreatedbytherespectivefieldandarmature(ortorquecomponent)currentsare orthogonally alignedsuchthat,whentorqueiscontrolled,thefieldfluxlinkageisnotaffected,henceenablingdynamictorqueresponse.
Vectorcontrolaccordinglygeneratesathree-phase PWM motorvoltageoutputderivedfroma complexvoltagevectortocontrolacomplexcurrentvectorderivedfrommotor'sthree-phasemotorstatorcurrentinputthrough projections or rotations backandforthbetweenthethree-phasespeedandtimedependentsystemandthesevectors'rotatingreference-frametwo-coordinate timeinvariantsystem.[23]
Suchcomplex stator motorcurrentspacevectorcanbedefinedina(d,q)coordinatesystemwithorthogonalcomponentsalongd(direct)andq(quadrature)axessuchthatfieldfluxlinkagecomponentofcurrentisalignedalongthedaxisandtorquecomponentofcurrentisalignedalongtheqaxis.[22] Theinductionmotor's(d,q)coordinatesystemcanbesuperimposedtothemotor'sinstantaneous(a,b,c)three-phase sinusoidal systemasshowninaccompanyingimage(phasesa&bnotshownforclarity).Componentsofthe(d,q)systemcurrentvector,allowconventionalcontrolsuchasproportionalandintegral,or PI,control,aswithaDCmotor.
Projectionsassociatedwiththe(d,q)coordinatesystemtypicallyinvolve:
[20][23][24]
∙Forwardprojectionfrominstantaneouscurrentsto(a,b,c)complex stator currentspacevectorrepresentationofthethree-phase sinusoidal system.
∙Forwardthree-to-twophase,(a,b,c)-to-(
)projectionusingthe Clarke transformation.Vectorcontrolimplementationsusuallyassumeungroundedmotorwithbalancedthree-phasecurrentssuchthatonlytwomotorcurrentphasesneedtobesensed.Also,backwardtwo-to-threephase,(
)-to-(a,b,c)projectionusesspacevectorPWMmodulatororinverseClarketransformationandoneoftheotherPWMmodulators.
∙Forwardandbackwardtwo-to-twophase,(
)-to-(d,q)and(d,q)-to-(
)projectionsusingtheParkandinverseParktransformations,respectively.
However,itisnotuncommonforsourcestousethree-to-two,(a,b,c)-to-(d,q)andinverseprojections.
While(d,q)coordinatesystemrotationcanarbitrarilybesettoanyspeed,therearethreepreferredspeedsorreferenceframes:
[16]
∙Stationaryreferenceframewhere(d,q)coordinatesystemdoesnotrotate;
∙Synchronouslyrotatingreferenceframewhere(d,q)coordinatesystemrotatesatsynchronousspeed;
∙Rotorreferenceframewhere(d,q)coordinatesystemrotatesatrotorspeed.
Decoupled torqueandfieldcurrentscanthusbederivedfromrawstatorcurrentinputsforcontrolalgorithmdevelopment.[25]
WhereasmagneticfieldandtorquecomponentsinDCmotorscanbeoperatedrelativelysimplybyseparatelycontrollingtherespectivefieldandarmaturecurrents,economicalcontrolofACmotorsinvariablespeedapplicationhasrequireddevelopmentofmicroprocessor-basedcontrols[25] withallACdrivesnowusingpowerfulDSP(digitalsignalprocessing)technology.[26]
Inverterscanbeimplementedaseither open-loop sensorlessorclosed-loopFOC,thekeylimitationofopen-loopoperationbeingmimimumspeedpossibleat100%torque,namely,about0.8 Hzcomparedtostandstillforclosed-loopoperation.[9]
Therearetwovectorcontrolmethods,director feedback vectorcontrol(DFOC)andindirectorfeedforward vectorcontrol(IFOC),IFOCbeingmorecommonlyusedbecauseinclosed-loopmodesuchdrivesmoreeasilyoperatethroughoutthespeedrangefromzerospeedtohigh-speedfield-weakening.[27] InDFOC,fluxmagnitudeandanglefeedbacksignalsaredirectlycalculatedusingso-calledvoltageorcurrentmodels.InIFOC,fluxspaceanglefeedforwardandfluxmagnitudesignalsfirstmeasurestatorcurrentsand rotor speedforthenderivingfluxspaceangleproperbysummingtherotoranglecorrespondingtotherotorspeedandthecalculatedreferencevalueof slip anglecorrespondingtotheslipfrequency.[28][29]
Sensorlesscontrol(seeSensorlessFOCBlockDiagram)ofACdrivesisattractiveforcostandreliabilityconsiderations.Sensorlesscontrolrequiresderivationofrotorspeedinformationfrommeasuredstatorvoltageandcurrentsincombinationwithopen-loopestimatorsorclosed-loopobservers.[20][21]
Applicationrecap[edit]
1.Statorphasecurrentsaremeasured,convertedtocomplexspacevectorin(a,b,c)coordinatesystem.
2.Currentvectorisconvertedto(
)coordinatesystem. Transformedtoacoordinatesystem rotatingin rotor referenceframe,rotorpositionbeingderivedby integrating thespeedbymeansof speedmeasurement sensor.
3.Rotor fluxlinkage vectorisestimatedbymultiplyingthestatorcurrentvectorwithmagnetizinginductanceLm and low-passfiltering theresultwiththerotorno-load timeconstant Lr/Rr,namely,therotorinductancetorotorresistanceratio.
4.Currentvectorisconvertedto(d,q)coordinatesystem.
5.d-axiscomponentofthestatorcurrentvectorisusedtocontroltherotorfluxlinkageandtheimaginaryq-axiscomponentisusedtocontrolthemotortorque.WhilePIcontrollerscanbeusedtocontrolthesecurrents, bang-bang typecurrentcontrolprovidesbetterdynamicperformance.
6.PIcontrollersprovide(d,q)coordinatevoltagecomponents.Adecouplingtermissometimesaddedtothecontrolleroutputtoimprovecontrolperformancetomitigatecrosscouplingorbigandrapidchangesinspeed,currentandfluxlinkage.PI-controlleralsosometimesneed low-passfiltering attheinp


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- Vector control motor
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
新编小学二年级数学上册寒假作业120Word文档下载推荐.docx
-
四年级数学上册第八单元《垂线与平行线》教案Word文档下载推荐.docx
-
学年重庆大学城第一中学校高一下学期第一次月考语文试题Word版含答案Word格式.docx
-
InmarsatF和InmarsatC船站的维护和检测Word下载.docx
-
劳动作文之哺乳期间解除劳动合同Word格式.docx
-
大西新职业安全卫生管理制度Word文件下载.docx
-
全国执业兽医资格考试试题Word格式文档下载.docx
-
部编教育部审定版本初中语文八年级上册最新名著导读之《昆虫记》Word格式.docx
-
20Executive Material ControlPlanWord文档格式.docx
-
学年人教版新课标 必修三 Unit1Unit 5 综合检测练习Word格式文档下载.docx
-
初中副校长述职报告4篇Word文档下载推荐.docx
-
北京市丰台区学年高一英语上学期期中试题A卷Word格式.docx
-
户外P6全彩显示屏报价方案书Word文档格式.docx
-
初中语文课外知识积累学霸必备Word格式.docx
-
煤矿《安全生产管理制度》Word格式.docx
-
XX幼儿园消防设计说明书资料Word格式.docx
-
有关快乐童年诗歌Word文档格式.docx
-
班主任工作心得体会三篇Word格式.docx
-
4s店个人工作总结文档格式.docx
