 机械原理大作业1.docx
机械原理大作业1.docx
- 文档编号:4306424
- 上传时间:2022-11-29
- 格式:DOCX
- 页数:21
- 大小:248.83KB
机械原理大作业1.docx
《机械原理大作业1.docx》由会员分享,可在线阅读,更多相关《机械原理大作业1.docx(21页珍藏版)》请在冰豆网上搜索。
机械原理大作业1
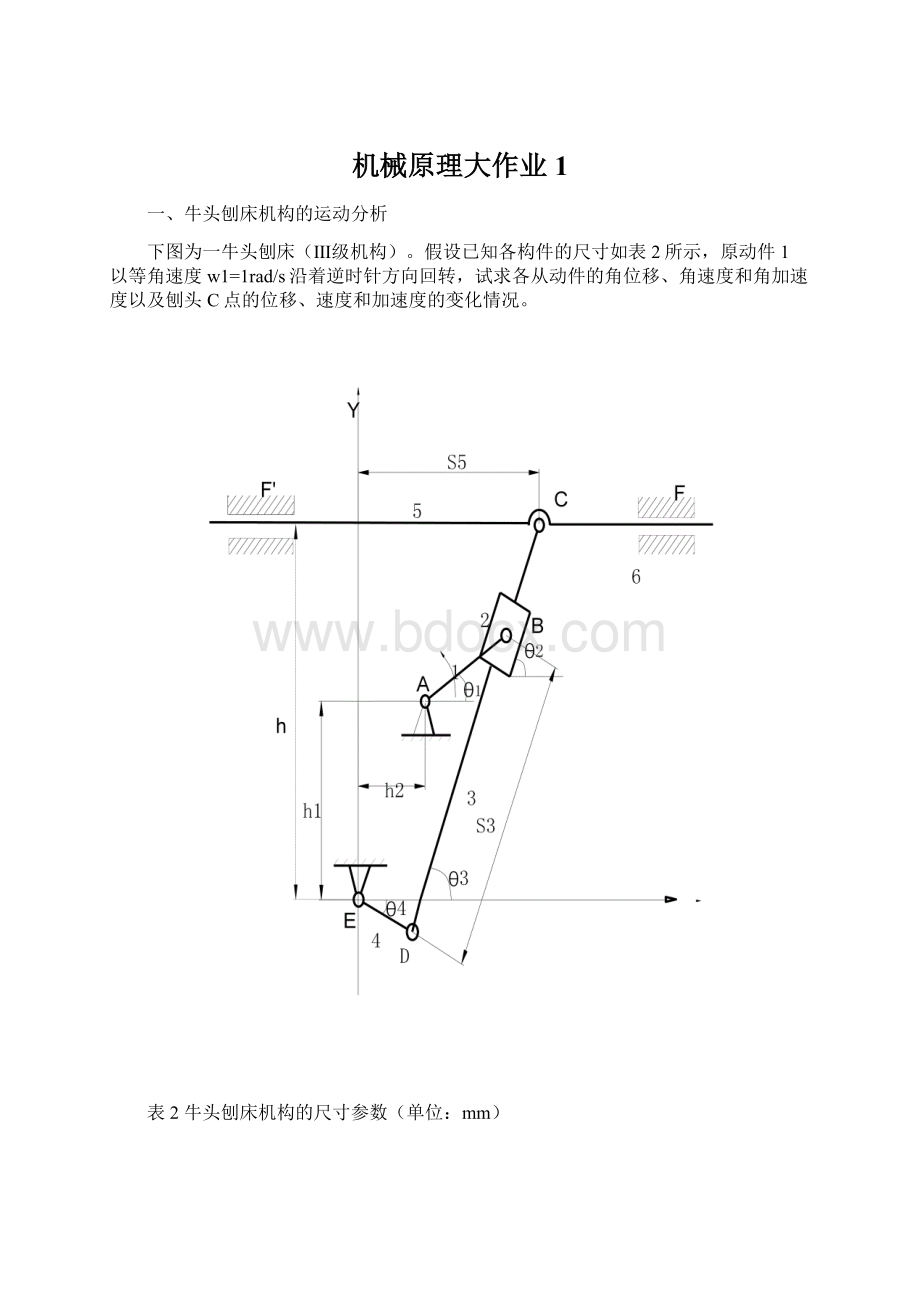
一、牛头刨床机构的运动分析
下图为一牛头刨床(Ⅲ级机构)。
假设已知各构件的尺寸如表2所示,原动件1以等角速度w1=1rad/s沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C点的位移、速度和加速度的变化情况。
表2牛头刨床机构的尺寸参数(单位:
mm)
题号
LAB
LCD
LDE
h
h1
h2
E
8-E
160
1020
250
900
460
120
LDE=250
二、牛头刨床机构的运动分析方程
1)位置分析
建立封闭矢量多边形
建立一直角坐标系,并标出各杆矢量及其方位角,其中共有4个未知量
(θ2=
)、
、
、
。
利用两个封闭图形ABDEFA和EDCGE,建立两个封闭矢量方程,由此可得:
(1)
把
(1)写成投影方程得:
(2)
由以上各式用型转化法可求得
,滑块2的方位角
高斯消去法求解
2)速度分析
对
(2)求一次导数得:
(3)
矩阵式:
(4)
采用高斯消去法可求解(4)可解得角速度ω2,ω3;
3)加速度分析
把(4)对时间求导数得:
(5)
采用高斯消去法可求解(5)可解得角加速度α2,α3,α5,α6
三、程序流程图
四、计算源程序
#include
#include
#include
/*定义变量*/
constdoublePI=3.14159265358979;
constintN=4;
constdoubleEPSILON=0.0001;
constintT=1000;
/*代入已知量*/
doubleLab=160,Lcd=1020,Lde=250,h=900,h1=460,h2=120,Omega1=1;
/*声明子函数*/
voidAngleDisplacement(double[12],double);/*角位移函数*/
voidAngleVelocity(double[N][N],double[N],double[12],double);/*角速度函数*/
voidAngleAcceleration(double[N][N],double[N][N],double[N],double[12]);/*角加速度函数*/
voidGaussE(double[N][N],double[N],double[N]);/*高斯消去法函数*/
voidModulusMatrixA(double[12],double[N][N]);/*矩阵A函数*/
voidModulusMatrixB(double[12],double,double[N]);/*矩阵B函数*/
voidMatrixDA(double[12],double[N][N]);/*矩阵DA函数*/
voidMatrixDB(double[12],double,double[N]);/*矩阵DB函数*/
/*主函数*/
voidmain()
{
inti,j;
FILE*fp;
doubledata[36][12];
doublevalue[12],a[N][N],da[N][N],b[N],db[N],Phi1;
charflag;
/*打开文件*/
if((fp=fopen("Data","w"))==NULL)
{
printf("文件打开错误!
\n");
exit(0);
}
fprintf(fp,"Lab=%lf\n",Lab);
fprintf(fp,"s3\tPhi3\tPhi4\ts5\t");
fprintf(fp,"s3'\tOmega3\tOmega4\ts5'\t");
fprintf(fp,"s3''\tEpsilon3\tEpsilon4\ts5''");
printf("\n\n牛头刨床机构运动分析程序\n\n\n");
printf("\n");
printf("是否开始计算(Y/N):
");
scanf("%c",&flag);
if(flag=='Y')
{
/*计算并写入文件*/
value[0]=480;
value[1]=65*PI/180;
value[2]=10*PI/180;
value[3]=500;
for(i=0;i<36;i++)
{
Phi1=i*PI/18;
AngleDisplacement(value,Phi1);
ModulusMatrixB(value,Phi1,b);
ModulusMatrixA(value,a);
AngleVelocity(a,b,value,Phi1);
MatrixDA(value,da);
MatrixDB(value,Phi1,db);
AngleAcceleration(a,da,db,value);
for(j=1;j<3;j++)
value[j]=value[j]*180/PI;
for(j=0;j<12;j++)
data[i][j]=value[j];
fprintf(fp,"\n");
for(j=0;j<12;j++)
fprintf(fp,"%12.3f\t",data[i][j]);
}
fclose(fp);
/*输出数据*/
printf("\n\n\n计算结果如下:
\n");
for(i=0;i<36;i++)
{
Phi1=i*PI/18;
printf("\n输出Phi1=%d时的求解\n",i*10);
printf("S3Phi3Phi5S5\n");
for(j=0;j<4;j++)
printf("%lf\t",data[i][j]);
printf("\n");
printf("S3'Omega3Omega5S5'\n");
for(j=4;j<8;j++)
printf("%lf\t",data[i][j]);
printf("\n");
printf("S3''Epsilon3Epsilon5S5''\n");
for(j=8;j<12;j++)
printf("%lf\t",data[i][j]);
printf("\n");
}
printf("\n程序运行结束,计算结果已写入Date文件中,请打开查看。
\n");
}
elseif(flag=='n')
printf("无法计算,请重新选择!
\n");
else
exit(0);
}
/*计算角位移*/
voidAngleDisplacement(doublevalue[12],doublePhi1)
{
doubleae,s3,Phi3,Phi4,s5,t=0;
s3=value[0];
Phi3=value[1];
Phi4=value[2];
s5=value[3];
doublexb,yb,xd,yd,xc,yc;
while(t { xb=h2+Lab*cos(Phi1); yb=h1+Lab*sin(Phi1); xd=Lde*cos(Phi4); yd=Lde*sin(Phi4); s3=sqrt((xd-xb)*(xd-xb)+(yd-yb)*(yd-yb)); xc=xd+Lcd*(xb-xd)/s3; yc=yd+Lcd*(yb-yd)/s3; Phi3=atan2(yc-yd,xc-xd); s5=xc; ae=sqrt(h1*h1+h2*h2); if(Phi4>45*PI/180) Phi4-=PI/4; if(fabs(yc-h) return; else Phi4=atan((yd-yc+h)/(Lde*cos(Phi4))); value[0]=s3; value[1]=Phi3; value[2]=Phi4; value[3]=s5; while(value[1]>2*PI) value[1]-=2*PI; while(value[1]<0) value[1]+=2*PI; while(value[2]>PI) value[2]-=2*PI; while(value[2]<-PI) value[2]+=2*PI; t+=1; if(t>=T) { printf("%f迭代失败.\n",Phi1*180/PI); exit(0); } } } /*计算角速度*/ voidAngleVelocity(doublea[N][N],doubleb[N],doublevalue[12],doublePhi1) { doublep[N]; GaussE(a,b,p); value[4]=p[0]; value[5]=p[1]; value[6]=p[2]; value[7]=p[3]; } /*计算角加速度*/ voidAngleAcceleration(doublea[N][N],doubleda[N][N],doubledb[N],doublevalue[12]) { inti,j; doublebk[N]={0}; doublep[N]; for(i=0;i { for(j=0;j { bk[i]+=-da[i][j]*value[4+j]; } bk[i]+=db[i]*Omega1; } GaussE(a,bk,p); value[8]=p[0]; value[9]=p[1]; value[10]=p[2]; value[11]=p[3]; } /*高斯消去法*/ voidGaussE(doublea[N][N],doubleb[N],doublep[N]) { inti,j,k; doubleag[N][N],bg[N],t; for(i=0;i { for(j=0;j { ag[i][j]=a[i][j]; } } for(i=0;i bg[i]=b[i]; /*将绝对值最大的元素换到主对角线上*/ if(ag[0][0] { for(j=0;j { t=ag[0][j]; ag[0][j]=ag[1][j]; ag[1][j]=t; } t=bg[0]; bg[0]=bg[1]; bg[1]=t; } if(ag[2][2] { for(j=0;j { t=ag[2][j]; ag[2][j]=ag[3][j]; ag[3][j]=t; } t=bg[2]; bg[2]=bg[1]; bg[3]=t; } /*初等行变换*/ for(k=0;k for(i=0;i { if(i! =k) { for(j=0;j if(j! =k) { ag[i][j]-=ag[i][k]/ag[k][k]*ag[k][j]; } bg[i]-=bg[k]*ag[i][k]/ag[k][k]; ag[i][k]=0; } } for(i=0;i bg[i]/=ag[i][i]; p[0]=bg[0]; p[1]=bg[1]; p[2]=bg[2]; p[3]=bg[3]; } /*系数矩阵A*/ voidModulusMatrixA(doublevalue[12],doublea[N][N]) { doubles3,Phi3,Phi4,s5; s3=value[0]; Phi3=value[1]; Phi4=value[2]; s5=value[3]; a[0][0]=cos(Phi3); a[0][1]=-s3*sin(Phi3); a[0][2]=-Lde*sin(Phi4); a[0][3]=0; a[1][0]=sin(Phi3); a[1][1]=s3*cos(Phi3); a[1][2]=Lde*cos(Phi4); a[1][3]=0; a[2][0]=0; a[2][1]=-Lcd*sin(Phi3); a[2][2]=-Lcd*sin(Phi4); a[2][3]=-1; a[3][0]=0; a[3][1]=Lcd*cos(Phi3); a[3][2]=Lde*cos(Phi4); a[3][3]=0; } /*系数矩阵B*/ voidModulusMatrixB(doublevalue[12],doublePhi1,doubleb[N]) { b[0]=-Lab*sin(Phi1); b[1]=Lab*cos(Phi1); b[2]=0; b[3]=0; } /*系数矩阵DA*/ voidMatrixDA(doublevalue[12],doubleda[N][N]) { doubles3,Phi3,Phi4,s5,s3g,Omega3,Omega4,s5g; s3=value[0]; Phi3=value[1]; Phi4=value[2]; s5=value[3]; s3g=value[4]; Omega3=value[5]; Omega4=value[6]; s5g=value[7]; da[0][0]=-Omega3*sin(Phi3); da[0][1]=-s3g*sin(Phi3)-s3*cos(Phi3)*Omega3; da[0][2]=-Lde*cos(Phi4)*Omega4; da[0][3]=0; da[1][0]=Omega3*cos(Phi3); da[1][1]=s3g*cos(Phi3)-s3*sin(Phi3)*Omega3; da[1][2]=-Lde*sin(Phi4)*Omega4; da[1][3]=0; da[2][0]=0; da[2][1]=-Lcd*cos(Phi3)*Omega3; da[2][2]=-Lde*cos(Phi4)*Omega4; da[2][3]=0; da[3][0]=0; da[3][1]=-Lcd*sin(Phi3)*Omega3; da[3][2]=-Lde*sin(Phi4)*Omega4; da[3][3]=0; } /*系数矩阵DB*/ voidMatrixDB(doublevalue[12],doublePhi1,doubledb[N]) { db[0]=-Lab*Omega1*cos(Phi1); db[1]=-Lab*Omega1*sin(Phi1); db[2]=0; db[3]=0; } 五.计算结果及数据 Phi1 s3 Phi3 Phi4 s5 s3' Omega3 Omega4 s5' s3'' Epsilon3 Epsilon4 s5'' 0 577.770 84.244 -27.350 324.353 161.964 0.026 -0.012 -31.846 9.717 0.244 -0.109 -298.476 10 606.017 84.705 -27.554 315.773 160.750 0.065 -0.028 -79.421 -23.601 0.209 -0.070 -245.515 20 633.548 85.531 -27.878 300.463 153.800 0.099 -0.036 -117.680 -55.676 0.178 -0.020 -191.693 30 659.391 86.669 -28.236 279.517 141.482 0.128 -0.034 -146.773 -84.926 0.153 0.034 -140.583 40 682.655 88.075 -28.535 253.901 124.368 0.153 -0.024 -167.270 -110.540 0.133 0.087 -93.885 50 702.563 89.713 -28.682 224.437 103.125 0.175 -0.004 -179.980 -132.228 0.118 0.139 -52.311 60 718.453 91.557 -28.587 191.806 78.439 0.194 0.025 -185.899 -150.018 0.107 0.188 -16.259 70 729.782 93.588 -28.164 156.559 50.972 0.212 0.061 -186.247 -164.140 0.099 0.234 13.797 80 736.119 95.793 -27.333 119.128 21.335 0.229 0.106 -182.539 -174.965 0.094 0.277 37.159 90 737.134 98.163 -26.019 79.837 -9.938 0.245 0.158 -176.661 -182.984 0.091 0.316 52.932 100 732.581 100.691 -24.154 38.899 -42.410 0.261 0.216 -170.930 -188.808 0.088 0.350 60.172 110 722.280 103.372 -21.678 -3.577 -75.759 0.276 0.280 -168.103 -193.162 0.086 0.381 58.051 120 706.096 106.203 -18.539 -47.591 -109.800 0.290 0.349 -171.371 -196.888 0.083 0.408 45.930 130 683.914 109.179 -14.688 -93.256 -144.504 0.305 0.422 -184.330 -200.923 0.080 0.434 23.252 140 655.608 112.294 -10.080 -140.801 -180.009 0.318 0.500 -211.001 -206.210 0.075 0.461 -10.718 150 621.016 115.539 -4.666 -190.576 -216.593 0.331 0.583 -255.845 -213.311 0.066 0.493 -56.775 160 579.925 118.898 1.607 -243.020 -254.511 0.341 0.672 -323.517 -220.961 0.048 0.522 -113.277 170 532.118 122.338 8.787 -298.542 -293.335 0.346 0.764 -417.136 -221.355 0.005 0.519 -164.301 180 477.649 125.779 16.856 -357.087 -329.891 0.339 0.846 -531.133 -188.100 -0.092 0.387 -141.282 190 417.677 129.047 25.552 -417.004 -353.805 0.309 0.880 -631.872 -66.105 -0.272 -0.070 132.706 200 355.996 131.836 34.066 -473.239 -346.203 0.243 0.798 -640.593 165.643 -0.474 -0.911 789.265 210 299.342 133.816 40.997 -517.511 -296.332 0.151 0.565 -488.762 393.733 -0.557 -1.718 1515.531 220 254.495 134.835 44.970 -542.304 -2


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械 原理 作业
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《雷雨》中的蘩漪人物形象分析 1.docx
《雷雨》中的蘩漪人物形象分析 1.docx
-
《经济法基础》第三章章节练习与答案解析.docx
-
安徽省合肥市包河区卫生健康系统招聘试题及答案解析.docx
-
《河中石兽》复习过程.docx
-
版二级建造师《公路工程管理与实务》考前检测 附答案.docx
-
保密安全制度监理组5篇修改版.docx
-
北师大版届九年级上学期期末考试英语试题I卷.docx
-
PACE产品及周期优化法系统结构复习课程.docx
-
常规变电站常规设计.docx
-
初三欧姆定律计算题题型整理.docx
-
《测绘管理与法律法规》模拟试题一附答案.docx
-
2测风工岗位练兵技术比武.docx
-
《小学语文不同课型的教学模式参考》1.docx
-
15高考宁夏英语及答案教学内容.docx
-
ABS圆形笔筒课程设计说明书.docx
-
c语言程序填空题.docx
-
茶艺师高级三级教学计划大纲.docx
-
场平土石方工程施工项目组织设计.docx
-
《人力资源管理》期末试题及答案教学内容.docx
-
《河南省高等学校教师实验人员中高级专业技术职务任职资格申报评审条件试行.docx
-
01钢结构制作施工工艺标准文档.docx
-
IIR数字滤波器的设计流程图.docx
-
005纺丝作业指导书.docx
-
1991高考化学试题.docx
-
GMP审核检查表与审核员指南.docx
-
成本会计试题二.docx
-
14001讲师心态调整培训讲座讲义体验版共14页文档.docx
-
cpld矩阵键盘.docx
-
《金融服务营销》.docx
-
NHR100过程校验仪140408.docx
-
Q+ Web 改版设计小结.docx
-
八年级上册古诗词鉴赏含参考答案.docx
-
职工食堂危险源识别评价表文档格式.docx
-
中考英语总复习单项选择训练汇萃370题Word格式.docx
-
最全搅拌机食谱带图文档格式.docx
-
最新电影铁人王进喜的观后感十二篇铁人王进喜观后感Word文件下载.docx
-
重症医学科申请材料1Word文档格式.docx
-
《会计基础》考前押题密卷三doc1Word文档下载推荐.docx
-
《红楼梦》导读之第十三回 《秦可卿死封龙禁尉 王熙凤协理宁国府》Word格式文档下载.docx
-
自考马克思主义基本原理概论题Word格式文档下载.docx
-
5的乘法口诀教案Word文件下载.docx
-
《水浒传》读书笔记1000字精选多篇Word文档下载推荐.docx
-
8000D型便携采样器说明书Word格式.docx
-
5长清模考试题Word文档下载推荐.docx
-
中西方戏剧知识整理Word下载.docx
-
09届上海市高三英语一模选标题Word格式.docx
-
CAD三维图的画法文档格式.docx
-
16年级小学语文趣味习题Word格式文档下载.docx
-
PEP 小学英语总复习参考资料Word格式.docx
-
最新Agilent6820培训手册中文Word文档格式.docx
-
珠宝企业经营管理自考Word文件下载.docx
