 自动控制原理实验典型系统的瞬态响应和稳定性资料.docx
自动控制原理实验典型系统的瞬态响应和稳定性资料.docx
- 文档编号:907498
- 上传时间:2022-10-13
- 格式:DOCX
- 页数:17
- 大小:159.18KB
自动控制原理实验典型系统的瞬态响应和稳定性资料.docx
《自动控制原理实验典型系统的瞬态响应和稳定性资料.docx》由会员分享,可在线阅读,更多相关《自动控制原理实验典型系统的瞬态响应和稳定性资料.docx(17页珍藏版)》请在冰豆网上搜索。
自动控制原理实验典型系统的瞬态响应和稳定性资料
实验二典型系统的瞬态响应和稳定性分析
一、实验目的
进一步熟悉自动控制实验教学系统软件包的使用方法,为后续实验打好基础。
学习瞬态性能指标的测试技巧,了解参数对系统瞬态性能及稳定性的影响,认识典型系统阶跃响应曲线特点,及其环节参数与瞬态性能指标关系。
二、实验内容
(1)进一步熟悉自动控制实验教学系统软件包的使用方法。
(2)进行典型系统瞬态性能指标的测试技巧,了解参数对系统瞬态性能及稳定性的影响。
三、实验装置
(1)微型计算机。
(2)自动控制实验教学软件包。
四、实验原理
1、典型二阶系统
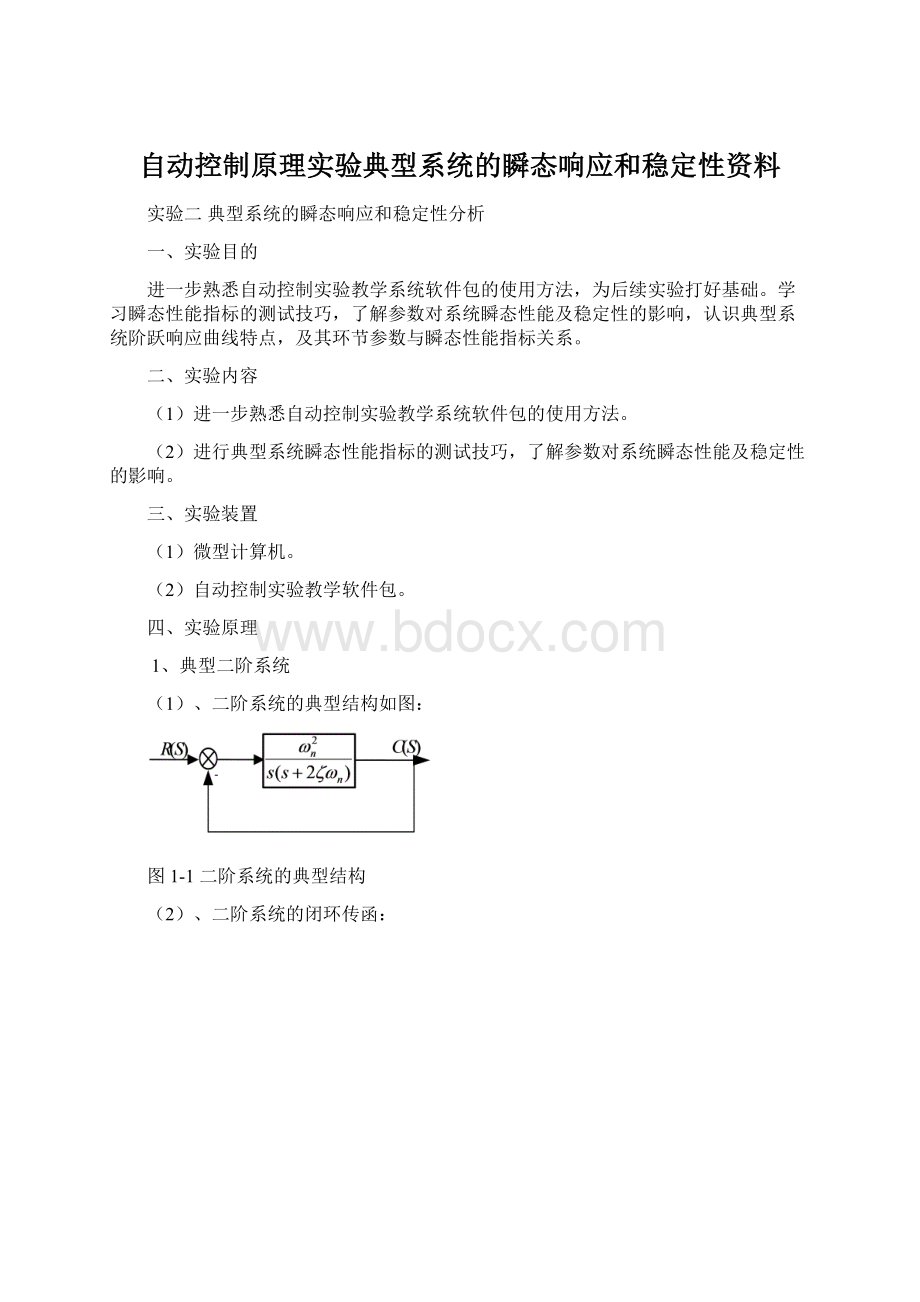
(1)、二阶系统的典型结构如图:
图1-1二阶系统的典型结构
(2)、二阶系统的闭环传函:
其中,为阻尼比,为无阻尼自然振荡频率。
并且ξ=1/2√KTω=1/T0=√(K/T)
(3)、二阶系统的单位阶跃响应:
1)当时,。
2)当时,。
3)当时,。
4)时,
。
(4)、二阶系统的单位阶跃响应的动态性能指标:
1)上升时间。
2)峰值时间。
3)超调量。
4)调节时间
5)衰减比n=两个波峰之间的比值。
注:
。
(2)典型三阶系统
R(s)E(s)
开环传递函数为:
G(S)H(S)==
其中:
K=K1K2(开环增益),用劳斯判据可得出系统的稳定、临界稳定、不稳定时的开环增益的范围。
五、实验结果及数据分析
(1)二阶系统
ξ>1的情况
图一
已知条件:
ξ=2ωn=4K=1T=1/16
由图可知:
c(tp)=1.003c(∞)=1.003
tp=5str=2.2174sts:
测量值为5s计算值为4.732s
图二
已知条件:
ξ=4ωn=4K=1/2T=1/32
由图可知:
c(tp)=1.003c(∞)=1.003
tp=11.625str=4.7808sts:
测量值为11.625s计算值为10.587s
ξ=1的情况
图三
已知条件:
ξ=1ω=1K=1/2T=1/2
由图可知:
c(tp)=1.003c(∞)=1.003
0<ξ<1的情况
图四
已知条件:
ξ=0.2ωn=0.8K=2T=3.125
由图可知:
c(tp)=1.528c(∞)=1.001tp=4.04str=2.273sts=36.65s
理论计算值:
δ%=0.5403tp=4.007str=2.003sts=27.56s
衰减比n:
n=1.528/1.146=1.333
图五
已知条件:
ξ=0.4ωn=0.4K=0.5T=3.125
由图可知:
c(tp)=1.26c(∞)=1.006tp=8.406str=5.335sts=39.93s
理论计算值:
δ%=0.2538tp=8.569str=4.854sts=27.5s
衰减比n:
n=1.26/1.018=1.238
图六
已知条件:
ξ=0.6ωn=0.6K=0.5T=1.389
由图可知:
c(tp)=1.097c(∞)=1.003tp=6.697str=4.503sts=15.032s
理论计算值:
δ%=0.095tp=6.545str=4.657sts=12.222s
衰减比n:
n=1.097/1.015=1.081
图七
已知条件:
ξ=0.8ωn=0.8K=0.5T=0.781
由图可知:
c(tp)=1.017c(∞)=1.003tp=6.651str=5.162sts=9.475s
理论计算值:
δ%=0.015tp=6.545str=4.734sts=6.875s
衰减比n:
n=1.017/1=1.017
ξ=0的情况
图八
已知条件:
ξ=0ω=0K=0T=1
由图可知是一条与横轴重合的直线
(2)三阶系统
令开环传递函数中的T1=1,T2=2,来分析该系统的稳定性
开环传递函数为G(s)H(s)==
特征方程为:
s(s+1)(2s+1)+k=0
2s^3+3s^2+s+k=0
21
3k
0
k
有劳斯判据可知:
系统的稳定范围为:
0 系统临界稳定时: k=1.5 系统不稳定的范围: k>1.5 系统稳定状态: 图一 T1=1T2=2K1=0.5K2=1K=K1K2=0.5 由图可知系统振荡几次后最终达到稳定状态 图二 T1=1T2=2K1=0.5K2=2K=K1K2=1 由图可知系统振荡几次后最终达到稳定状态 临界稳定状态: 图三 T1=1T2=2K1=0.5K2=3K=K1K2=1.5 由图可知系统一直在做等幅振荡 系统不稳定: 图四 T1=1T2=2K1=0.5K2=4K=K1K2=2 由图可知系统的幅值一直在增大,是一种不稳定状态。 图五 T1=1T2=2K1=0.5K2=5K=K1K2=2.5 由图可知系统的幅值一直在增大,是一种不稳定状态。 六、误差分析 (1)对二阶系统分析可知,当0<ξ<1时,峰值时间tp和上升时间理论计算值与实际测量值接近,误差较小;调节时间ts的理论计算值与实际测量值有一定的误差,这是因为理论上当曲线在终值的2%以内就可以,但实验中较难取到系统曲线刚好到达2%处的点,所以是以刚好达到终值时的时间作为调节时间,此结果比计算值大些。 (2)从图中取点,会存在一定的人为取点误差,但与实际结果较为接近。 七、思考与讨论 1、在前面二阶系统的原理图中,改变增益K会发生不稳定现象吗? 答: 会,因为改变开环增益K时,ξ将发生变化,可能使ξ的值大于1,从而使系统不稳定。 2、有哪些措施能增加系统的稳定度? 他们对系统的性能还有什么影响? 答: 可以增加比例微分环节或者是测速反馈环节以改变系统的性能。 微分环节: 增加系统的阻尼比ξ,使超调量下降,调节时间也下降,不影响系统的稳态误差和自然振荡频率。 比例环节: 是开环增益增大从而减小稳态误差。 测速反馈环节: 降低了开环增益,加大了斜坡信号输入时的稳态误差,不影响自然振荡频率,提高了阻尼比ξ。 3、根据实验结果,分析二阶系统ts、δ%与ξ、ωn之间的关系。 答: 有已知公式可知其关系为: 超调量。 调节时间 4、考虑当二阶振荡环节的阻尼系数ξ<0和ξ<-1时,系统会出现什么样的情况? 答: 当ξ<0和ξ<-1时系统特征方程根实部为正数,特征根在s平面的右半平面,系统为不稳定的系统。 八、实验总结与收获 (1)通过本次试验进一步熟悉自动控制实验教学系统软件包的使用方法,为后续实验打好基础。 (2)学习瞬态性能指标的测试技巧,了解参数对系统瞬态性能及稳定性的影响,认识典型系统阶跃响应曲线特点,及其环节参数与瞬态性能指标关系。 (3)通过计算分析加深了对二阶系统和三阶系统的稳定性认识,将理论知识和实际操作联系起来。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动控制 原理 实验 典型 系统 瞬态 响应 稳定性 资料
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 转基因粮食的危害资料摘编Word下载.docx
转基因粮食的危害资料摘编Word下载.docx
-
高中英语词组大全Word文档下载推荐.docx
-
卫计局年工作总结及新年工作计划Word格式.docx
-
贵州省煤矿安全管理人员安全资格证A考试概况Word格式.docx
-
系统集成项目招标文件Word文件下载.docx
-
消防设计技术审查的要点Word文档格式.docx
-
第三章 习题课 带电粒子在磁场或复合场中的运动Word格式.docx
-
湖南岳阳中考英语模拟卷含答案Word文档格式.docx
-
电子商务考试题总汇打印版打印打印Word下载.docx
-
选调生考试备考言语理解与表达真题Word文档格式.docx
-
高考物理实验题专练 专练15Word文档格式.docx
-
加装奥迪A4L蓝牙电话功能Word文档下载推荐.docx
-
学年下学期好教育高三月考仿真卷A卷 语文 学生版后附详解Word文档下载推荐.docx
-
净化生产车间工程一般施工技术施工方案Word文档格式.docx
-
内蒙古呼和浩特市第六中学学年高一政治下学期期末考试试题Word下载.docx
-
证券行业客户经理电话营销技巧与实例Word文档下载推荐.docx
-
叶芝 苇间风文档格式.docx
-
最新中美贸易摩擦的原因及解决对策1论文Word文件下载.docx
-
意义的近义词Word格式文档下载.docx
-
上海市中考英语试题S.docx
-
专题12观点论证类设问.docx
-
附加安心重疾条款.docx
-
设计变更管理办法修改意见稿FINAL汇编.docx
-
毕业赠言毕业致词精选多篇.docx
-
银行新员工代表发言稿精选多篇.docx
-
北京市朝阳区届高三第一学期期末语文试题Word版含答案.docx
-
HL线切割使用说明书模板.docx
-
车工实训周记.docx
-
USBHID键盘扫描码.docx
-
Apmpoqu4调研报告.docx
-
最熟悉的陌生人作文八篇.docx
-
被动语态综合讲解.docx
-
计算机软件项目计划书格式.docx
-
冀教版届九年级下学期英语中考模拟C卷.docx
-
华师大版八年级数学上册教学设计133 等腰三角形2课时.docx
-
简单网站界面jsp图书馆借阅管理系统.docx
-
话务员沟通技巧.docx
-
建筑工地技术员实习报告.docx
-
会议管理手册.docx
-
江苏省淮安市学年高一上学期期末考试化学试题.docx
-
机电设备安装调试综合实训.docx
-
教师个人工作总结范文3篇.docx
-
教学创意要从开学典礼开始.docx
-
基础护理试题大全章.docx
-
急诊三级综合医院评审标准.docx
-
届初中毕业典礼教师发言稿20.docx
-
计算机应用与维修专业人才培养方案.docx
-
家庭经济困难学生认定方法与管理信息系统研究文档.docx
-
建设工程设计合同doc.docx
-
建筑消防系统安装监理细则详细版.docx
-
建设工程买卖合同雨水工程.docx
