 111位移分量与应变分量几何方程.docx
111位移分量与应变分量几何方程.docx
- 文档编号:10743694
- 上传时间:2023-02-22
- 格式:DOCX
- 页数:23
- 大小:778.27KB
111位移分量与应变分量几何方程.docx
《111位移分量与应变分量几何方程.docx》由会员分享,可在线阅读,更多相关《111位移分量与应变分量几何方程.docx(23页珍藏版)》请在冰豆网上搜索。
111位移分量与应变分量几何方程
第十节位移分量与应变分量几何方程
由于载荷作用或者温度变化等外界因素等影响,物体各点在空间的位置将发生变化,就是产生位移。
这个移动过程,弹性体将可能同时发生两种位移变化。
第一种位移是位置的改变,但是物体部各个点仍然保持初始状态的相对位置不变,这种位移是物体在空间做刚体运动引起的,因此称为刚体位移。
第二种位移是弹性体形状的变化,位移发生时不仅改变物体的绝对位置,而且改变了物体部各个点的相对位置,这是物体变形引起的位移,称为变形位移。
一般来说,上述两种位移是同时出现的,当然对于弹性力学的研究,主要是讨论后一种位移,因为变形位移与弹性体的应力有着直接的关系。
根据连续性假设,弹性体在变形前和变形后仍保持为连续体。
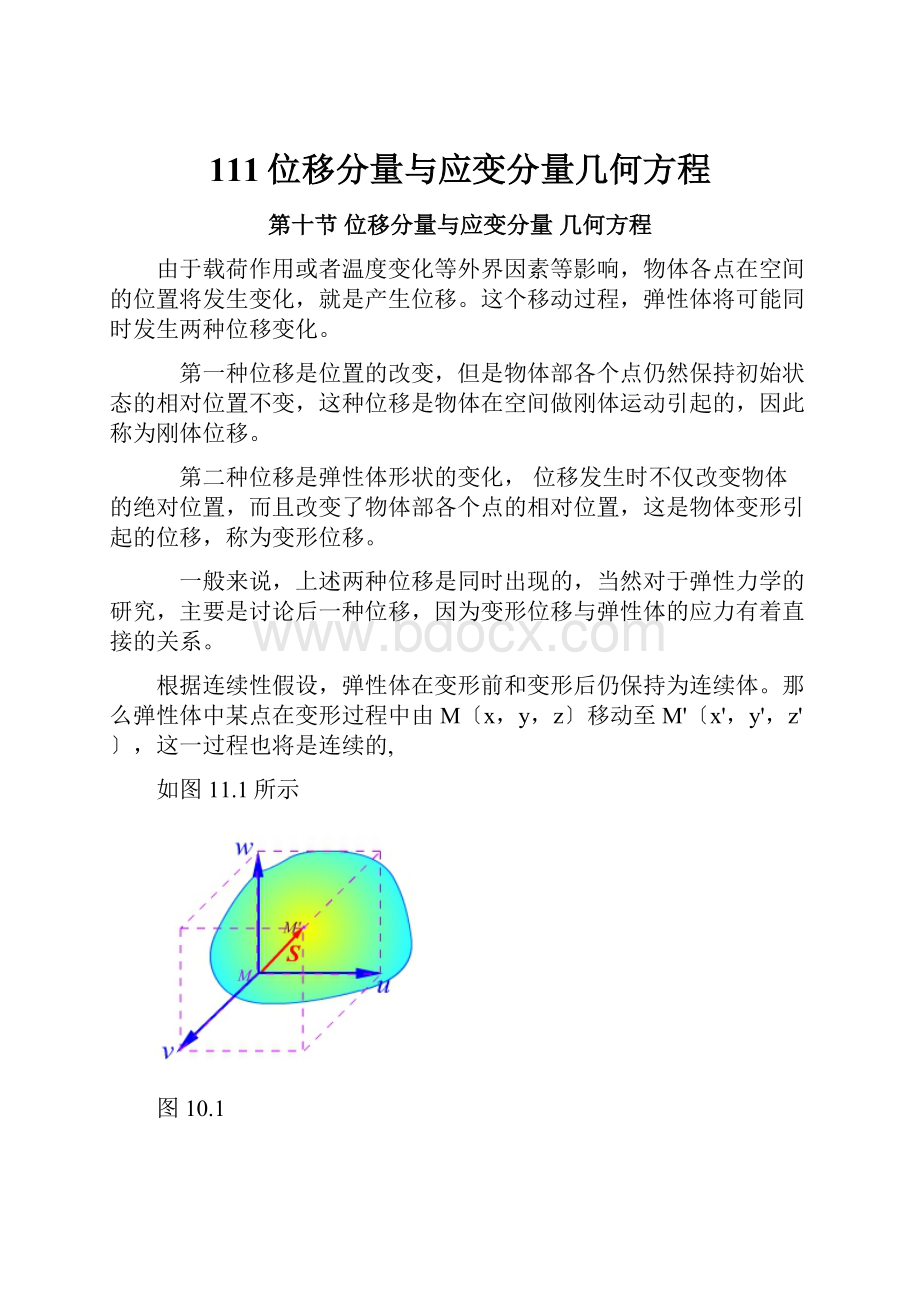
那么弹性体中某点在变形过程中由M〔x,y,z〕移动至M'〔x',y',z'〕,这一过程也将是连续的,
如图11.1所示
图10.1
在数学上,x',y',z'必为x,y,z的单值连续函数。
设MM'=S为位移矢量,其三个分量u,v,w为位移分量。
那么
u=x'〔x,y,z〕-x=u〔x,y,z〕
v=y'〔x,y,z〕-y=v〔x,y,z〕
w=z'〔x,y,z〕-z=w〔x,y,z〕
显然,位移分量u,v,w也是x,y,z的单值连续函数。
以后的分析将进一步假定位移函数具有三阶连续导数。
为进一步研究弹性体的变形情况,假设从弹性体中分割出一个微分六面体单元,其六个面分别与三个坐标轴垂直。
对于微分单元体的变形,将分为两个局部讨论。
一是微分单元体棱边的伸长和缩短;二是棱边之间夹角的变化。
弹性力学分别使用正应变和切应变表示这两种变形的。
对于微分平行六面体单元,设其变形前与x,y,z座标轴平行的棱边分别为MA,MB,MC,变形后分别变为M'A',M'B',M'C'。
假设分别用xyz表示x,y,z轴方向棱边的相对伸长度,即正应变;
分别用xyyzzx表示x和y,y和z,z和x轴之间的夹角变化,即切应变。
那么
对于小变形问题,为了简化分析,将微分单元体分别投影到Oxy,Oyz,Ozx平面来讨论。
显然,单元体变形前各棱边是与坐标面平行的,变形后棱边将有相应的转动,但我们讨论的是小变形问题,这种转动所带来的影响较小。
特别是物体位移中不影响变形的计算,假设各点的位移仅为自身的大小和形状的变化所确定,那么这种微分线段的转动的误差是十分微小的,不会导致微分单元体的变形有明显的变化。
首先讨论Oxy面上投影的变形。
设ma,mb分别为MA,MB的投影,m'a',m'b'分别为M'A',M'B',即变形后的MA,MB的投影。
微分单元体的棱边长为dx,dy,dz,M点的坐标为〔x,y,z〕,u〔x,y,z〕,v(x,y,z)分别表示M点x,y方向的位移分量。
那么A点的位移为u(x+dx,y,z〕,v(x+dx,y,z〕,B点的位移为u(x,y+dy,z〕,v(x,y+dy,z〕。
按泰勒级数将A,B两点的位移展开,并且略去二阶以上的小量,那么A,B点的位移分别为
因为
所以
同理可得
由此可以得到弹性体任意一点微分线段的相对伸长度,即正应变。
显然微分线段伸长,那么正应变x,y,z大于零,反之那么小于零。
以下讨论切应变表达关系
。
假设yx为与x轴平行的微分线段ma向y轴转过的角度,xy为与y轴平行的mb向x轴转过的角度。
那么切应变
因为
上式的推导中,利用了小变形条件下位移的导数是高阶小量的结论。
同理可得
yx和xy可为正或为负,其正负号的几何意义为:
yx大于零,表示位移v随坐标x而增加,即x方向的微分线段正向向y轴旋转。
将上述两式代入切应变表达式,那么
同理可得
切应变分量大于零,表示微分线段的夹角缩小,反之那么增大。
综上所述,应变分量与位移分量之间的关系为
上述公式称为几何方程,又称柯西方程。
柯西方程给出了位移分量和应变分量之间的关系。
如果位移,由位移函数的偏导数即可求得应变;但是如果应变,由于六个应变分量对应三个位移分量,那么其求解将相对复杂。
这个问题以后作专门讨论。
几何方程给出的应变通常称为工程应变。
如果使用量符号,那么几何方程可以表达为
那么应变分量ij将满足二阶量的座标变换关系,应变量分量与工程应变分量的关系可表示为
第十一节纯变形位移与刚性转动位移
学习思路:
应变分量通过位移的偏导数描述了一点的变形,对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。
但是这还不能完全描述弹性体的变形,原因是没有考虑微分单元体的刚体转动。
通过分析弹性体无限邻近两点的位置变化,那么可得出刚体的转动位移与纯变形位移之间的关系。
刚体转动通过转动分量描述。
刚性转动位移的物理意义:
如果弹性体某点没有变形,那么无限邻近它的任意一点的位移由两局部组成,平动位移和转动位移。
如果发生变形,位移中还包括纯变形位移。
应变可以描述一点的变形,即对微分平行六面体单元棱边的伸长以及棱边之间夹角的改变做出定义。
但是这还缺乏以完全描述弹性体的变形,原因是应变分析仅仅讨论了棱边伸长和夹角变化,而没有考虑微分单元体位置的改变,即单元体的刚体转动。
通过分析弹性体无限邻近两点的位置变化,那么可得出刚体的转动位移与纯变形位移之间的关系。
设P点无限邻近O点,P点及其附近区域绕O作刚性转动,转过微小角度。
设转动矢量为ω,OP之间的距离矢量为,如图12.1所示
图11.1
那么
引入拉普拉斯算符矢量
设P点的位移矢量为S,有
S=ui+vj+wk
由于位移矢量可以表示为S=ω×,
所以
即
其中
x,y,z为转动分量,是坐标的函数,表示了弹性体微分单元体的刚性转动。
设M点的坐标为〔x,y,z〕,位移〔u,v,w〕。
与M点邻近的N点,坐标为〔x+dx,y+dy,z+dz〕,位移为〔u+du,v+dv,w+dw〕。
那么MN两点的相对位移为〔du,dv,dw〕。
因为位移为坐标的函数,所以
同理可得
以上位移增量公式中,前三项为产生变形的纯变形位移,后两项是某点邻近区域的材料绕该点像刚体一样转动的刚性转动位移。
刚性转动位移的物理意义为,如果弹性体中某点及邻近区域没有变形,那么无限邻近这一点的位移,根据刚体动力学可知,是由两局部组成。
分别是随这点的平动位移和绕这点的转动位移。
对于弹性体中某一点,一般还要发生变形,因此位移中还包括纯变形位移。
总的来讲,与M点无限邻近的N点的位移由三局部组成的:
1.随同M点作平动位移。
2.绕M点作刚性转动在N点产生的位移。
3.由于M点及其邻近区域的变形在N点引起的位移。
转动分量x,y,z对于微分单元体,描述的是刚性转动,但其对于整个弹性体来讲,仍属于变形的一局部。
三个转动分量和六个应变分量合在一起,不仅确定了微分单元体形状的变化,而且确定了方位的变化。
位移增量公式如果使用矩阵形式表示,可得
显然,位移的增量是由两局部组成的,一局部是转动分量引起的刚体转动位移,另一局部是应变分量引起的变形位移增量。
第十二节应变的坐标变换与应变量
上一节我们引入了应变分量,本节将讨论不同坐标系下一点的应变分量的关系。
与坐标转轴时的应力分量的变换一样,我们将建立应变分量转轴的变换公式,即ij在旧坐标系中的分量,求其在新坐标系中的各分量i'j'。
根据几何方程,坐标平动将不会影响应变分量。
因此只需坐标转动时的应变分量变换关系,设新坐标系Oxyz是旧坐标系Ox'y'z'经过转动得到的,如图13.1所示
图12.1
新旧坐标轴之间的夹角的方向余弦为
如下图,设变形前的M点,变形后移至M'点,设其位移矢量MM'=S,那么
所以,新坐标系的位移分量为,
根据几何方程,根据复合函数的微分关系
同理推导可得其余五个应变分量的变换公式,即
如果以nij〔i,j=1,2,3〕表示新旧坐标系之间的夹角的方向余弦,并注意到应变量表达式,那么上述应变分量变换公式可以写作
ij=nii'njj'ij
因此,如果将应变分量写作以下形式
那么应变分量满足量变换关系。
与应力量一样,应变量也是二阶对称量。
由公式可知,一点的六个独立的应变分量一旦确定,那么任意坐标系下的应变分量均可确定,即一点的应变状态就完全确定了。
不难理解,坐标变换后各应变分量均发生改变,但它们作为一个整体,所描述的一点的应变状态是不会改变的。
第十三节体积应变
本节介绍物体变形后的单位体积变化,即体积应变。
讨论微分平行六面体单元,如图14.1所示
图13.1
变形前,单元体的三条棱边分别为MA,MB,MC, 长dx,dy,dz,
其体积为:
V=dxdydz
设M点坐标为〔x,y,z〕,那么A,B,C点坐标分别为〔x+dx,y,z〕,〔x,y+dy,z〕和〔x,y,z+dz〕。
弹性体变形后,其三条棱边分别变为M'A',M'B',M'C'。
其中
假设用V'表示变形后的微分单元体体积,那么
将行列式展开并忽略二阶以上的高阶小量,那么
假设用
表示单位体积的变化即体积应变,那么由上式可得
显然体积应变
就是应变量的第一不变量J1。
因此
常写作
体积应变
大于零表示微分单元体膨胀,小于零那么表示单元体受压缩。
假设弹性体
处处为零,那么物体变形后的体积是不变的。
第十四节主应变和应变不变量
弹性体任一点的六个应变分量,即应变量随着坐标轴的旋转而改变。
因此是否可以像应力量一样,对于某一个确定点,在某个坐标系下所有的切应变分量都为零,仅有正应变分量不等于。
即能否找到三个相互垂直的方向,在这三个方向上的微分线段在物体变形后只是各自改变长度,而其夹角仍为直角。
答案是肯定的。
在任何应变状态下,至少可以找到三个这样的垂直方向,在该方向仅有正应变而切应变为零。
具有该性质的方向,称为应变主轴或应变主方向,该方向的应变称为主应变。
设ij为物体某点在坐标系的应变量,求其主应变1,2,3及应变主轴方向n1,n2,n3。
设MN为M点的主轴之一,其变形前的方向余弦为l,m,n,主应变为。
令d表示MN的长度,那么MN相对伸长为d,如图15.1所示
图14.1
设M点的位移为〔u,v,w〕,那么N点的位移为〔u+du,v+dv,w+dw〕。
因为
du=在x方向的变形位移分量+刚性转动位移在x方向的分量
=ld+刚性转动位移在x方向的分量
根据公式
即du等于纯变形位移与刚性转动位移在x方向的分量之和。
根据上述公式,可得
或者写作
同理可得
上述公式是关于l,m,n的齐次线性方程组。
对于l,m,n的齐次线性方程组,其非零解的条件为其系数行列式的值为零。
即
将上式展开,可得求解主应变得特征方程,
其中
显然与应力不变量一样,J1,J2,J3为应变不变量,分别称为第一,第二和第三应变不变量。
根据特征方程,可以求解得到三个主应变。
将求解后的主应变代入公式,并注意到任意一点三个方向余弦的平方和等于1,那么可解应变主轴的方向余弦。
由应力量和应变量,应力不变量和应变不变量之间的公式的比拟可知,主应变和应变主轴的特性与主应力和应力主轴是类似的。
第十五节应变协调方程
学习思路:
变形协调方程的数学意义是:
要使以三个位移分量为未知函数的六个几何方程不矛盾,那么应变分量必须满足的必要条件。
应变协调方程的物理意义可以从弹性体的变形连续性质作出解释。
如果变形不满足一定的关系,变形后的物体将出现缝隙或嵌入现象,不能重新组合成连续体。
为使变形后的微分单元体连续,应变分量必须满足一定的关系,这一关系就是应变协调方程,又称圣维南〔SaintVenant〕方程。
假设弹性体是单连通域的,应变协调方程不仅是变形连续的必要条件,而且也是充分条件。
利用位移函数的微分沿任意路径重新积分可以确定的位移必然是单值位移的条件,可以证明应变协调方程。
对于多连通域问题,应变分量满足变形协调方程只是位移连续的必要条件,只有加上位移连续补充条件作为充分条件。
几何方程说明,六个应变分量是通过三个位移分量表示的,因此六个应变分量将不可能是互不相关的,应变分量之间必然存在某种联系。
这个问题对于弹性力学分析是非常重要的。
因为如果位移分量,容易通过几何方程的求导过程获得应变分量;但是反之,如果应变分量,那么几何方程的六个方程将仅面对三个未知的位移函数,方程数显然超过未知函数的个数,方程组将可能是矛盾的。
随意给出六个应变分量,不一定能求出对应的位移。
例如:
例1设应变分量为:
,,求其位移
解:
显然该应变分量没有对应的位移。
要使这一方程组不矛盾,那么六个应变分量必须满足一定的条件。
以下我们将着手建立这一条件。
首先从几何方程中消去位移分量,把几何方程的第一式和第二式
分别对x和y求二阶偏导数,然后相加,并利用第四式,可得
假设将几何方程的第四,五,六式分别对z,x,y求一阶偏导数,然后四和六两式相加并减去第五式,那么
将上式对x求一阶偏导数,那么
分别轮换x,y,z,那么可得如下六个关系式,
上述方程称为应变协调方程或者变形协调方程,又称圣维南〔SaintVenant〕方程.
变形协调方程的数学意义是:
要使三个位移分量为未知函数的六个几何方程不相矛盾,那么应变分量必须满足的必要条件。
应变协调方程的物理意义可以从弹性体的变形连续作出解释。
假设物体分割成无数个微分六面体单元,变形后每一单元体都发生形状改变,如变形不满足一定的关系,变形后的单元体将不能重新组合成连续体,其间将产生缝隙或嵌入现象。
为使变形后的微分单元体仍能重新组合成连续体,应变分量必须满足一定的关系,这一关系就是应变协调方程。
假设弹性体是单连通域的,那么应变分量满足应变协调方程不仅是变形连续的必要条件,而且也是充分条件。
为证明应变协调方程是变形体连续的必要和充分条件,我们可利用弹性体变形连续的物理意义,反映在数学上那么要求位移分量为单值连续函数的性质。
我们的目的就是证明:
如果应变分量满足应变协调方程,那么对于单连通域,就一定可以通过几何方程的积分求得单值连续的位移分量。
下面我们推导单连通域的变形协调关系。
所谓的单连通域,是指该物体任一条闭曲线可以收缩到一点而不越出界外。
设应变分量ij单值连续,并有连续的二阶导数,那么由
轮换x,y,z计算,可得dv,dw和dy,dz。
如果能够通过积分,计算出
上述位移和转动分量如果是单值连续的,那么可得到弹性体的位移单值连续的条件。
保证上述位移单值连续的条件是其积分与积分路径P0P无关。
其充分与必要条件为
根据上述公式的第三式,可得
同理根据上述公式的第四和第八式,可得x对y,z的偏导数。
即
将计算x对y,z的偏导数回代到公式的第一式,那么可以得到转动分量x表达式。
如使x单值连续,其必要与充分条件是
或写作
同理讨论y和z的单值连续条件可得出类似的四个公式。
将单值连续的x,y和z代入位移计算公式,那么可得到单值连续的位移u,v,w。
由此可证变形协调方程是单连通域位移单值连续的必要和充分条件。
如果弹性体中的一条封闭曲线,假设收缩至一点必须越出域外,那么为:
多连通域物体。
一个多连通域物体,可用假设干个截面将物体局部的截开,使之成为单连通域。
如果所需的截面数为n,那么物体为n+1连域。
平面为有两个环形孔的物体,两个截面即可使其成为单连通域,所以为三连域。
对于多连通域问题,应变满足变形协调方程并不能确保位移在分割后的单连通域单值连续。
因为当位移分别从截面两侧趋近于截面上的某一点时,一般的说其将趋于不同的值。
分别用u+,v+,w+和u-,v-,w-表示截面两侧的位移,那么多连通域的位移单值连续条件还需要
补充条件
,
u+=u-,v+=v-,w+=w-
因此,对于多连通域问题,应变分量满足变形协调方程只是位移连续的必要条件,只有加上上述补充条件后,条件才是充分的。
第十六节弹性应变能函数
弹性体受外力作用后,不可防止地要产生变形,同时外力的势能也要发生变化。
当外力缓慢地(不致引起物体产生加速运动)加到物体上时,视作静力,便可略而不计系统的动能,同时也略去其他能量(如热能等)的消耗,那么外力势能的变化就全部转化为应变能(一种势能)储存于物体的部。
我们给出单位体积应变能的表达式。
为此,以
作用在微小单元ABCD两对边为例来说明(图18.1)。
图16.1
由图可知,作用在ABCD单元上的外
力为AD与CB边的
。
而
在AD边单位应变上所做的功为
在CB边单位应变上所做的功为
。
所以,外力在ABCD变形上所做的总功为
(16.1)
而y方向虽有变形,但没有外力作用,所以没有做功。
上述
所做的功,将全部转化为系统的应变能。
如令总应变能为U,那么应有
(16.2)
此处,U。
为单位体积的应变能
(16.3)
上述讨论,不难推广到一般情况,即物体的总应变能为
(16.4)
其中
(16.5)
或简写为
(16.6)
在上式中引入广义胡克定律可得
(16.7)
及
(16.8)
由上式看出,U。
恒为正。
由式(16.7)、(16.8)可知下式成立
(16.9)
及
(16.10)
此处
分别为用应力分量及应变分量表示的单位体积应变能(应变能密度),统称为应变能函数。
对于理想弹性体,那么在每一确定的应变状态下,都具有确定的应变能。
应变能函数是正定的势函数,所以弹性变形能又叫弹性势。
式(16.9),(16.10)表示,弹性应变能对任一应变分量的改变率等于相应的应力分量;而弹性应变能对任一应力分量的改变率,就等于相应的应变分量。
前已叙及,物体的变形可以分解为两局部,一局部为体积的变化,一局部为形状的变化。
因而应变能也应可以分解为相应的两局部。
容易理解,引起体积变化的各向同性的平均正应力(称为静水应力)为
,而与之相应的平均正应变为
,就是说,以下应力状态不引起微小单元体的形状改变:
因而,由于体积变化所储存在单位体积的应变能(简称为体变能)为
(16.11)
引起形状改变的应力状态为应力偏量
如令由于形状变化所储存在单位体积的应变能(简称为畸变能)为
(16.12)
此处,
为应力偏量,
为应变偏量。
为简便计,我们给出用主应力表示的
的表达式,
(16.13)
从而总应变能密度为
(16.14)
由上式看出,系统的总应变能密度与坐标的选择无关,U。
是一个不变量。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 111 位移 分量 应变 几何 方程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《城市规划基本知识》深刻复习要点.docx
《城市规划基本知识》深刻复习要点.docx
-
《高电压技术》word版.docx
-
《安全带》gb6095.docx
-
BCP计划应急计划.docx
-
《计算机组成与工作原理》第一章复习题.docx
-
CANON LBP系列激光打印机使用方法指南.docx
-
C语言课程设计火车票系统源代码.docx
-
3热力管道沟槽开挖方法.docx
-
HR岗位职责.docx
-
1 脱硫脱硝cems维护技术规范.docx
-
O2O超市商业项目计划书.docx
-
SCI期刊呼吸胸外.docx
-
18岁生日祝福语短信.docx
-
ITMC物流企业经营沙盘比赛规则.docx
-
XX钢绳成本管理.docx
-
Matlab的第三方工具箱大全强烈推荐.docx
-
安全保卫工作先进个人.docx
-
安全生产工作日记.docx
-
windows 漏洞集合.docx
-
Φ160数控落地镗铣床技术规格.docx
-
安全施工组织设计.docx
-
安全检查和隐患排查治理制度及记录.docx
-
部编版小学二年级语文下册课外阅读专项.docx
-
变电站投运前质量监督检查汇报材料模版.docx
-
版 创新设计 高考总复习 历史 北师大版第一部分 必考内容第十五单元 第38讲.docx
-
本科毕业设计论文.docx
-
北京大学社会心理学串讲笔记1一10章加试题.docx
-
亳州市教坛新星骨干教师学科带头人特级教师年度考核细则知识分享.docx
-
超星尔雅《人生与人心》期末考试满分答案.docx
-
财经法规与会计职业道德案例分析题.docx
-
茶文化会发言稿.docx
-
财务会计核算实习总结.docx
-
交通信号灯工程施工组织方案.docx
-
初二语文复习下册打印.docx
-
董事会年度工作报告.docx
-
理事会章程.docx
-
20款吹风机设计说明.docx
-
老人保养.docx
-
小班科学教案彩虹糖.docx
-
57 基坑施工安全专项方案.docx
-
仪表题库.docx
-
教师招考教育学试题.docx
-
滑块与木板模型.docx
-
初中化学计算题归纳.docx
-
《围城》读后感15篇.docx
-
《五代史伶官传序》优质课教学设计统编版高二选择性必修中.docx
-
IV级突发食品安全事故应急预案演练脚本.docx
-
小手拉大手文明一起走读后感社会文明靠大家范文7篇.docx
-
合同范文 回复调解函的范本.docx
-
盘扣式移动操作平台计算书.docx
-
高考阅读高频难词690个.docx
