 河南理工大学机械插床机构课程方案.docx
河南理工大学机械插床机构课程方案.docx
- 文档编号:11255930
- 上传时间:2023-02-26
- 格式:DOCX
- 页数:17
- 大小:207.04KB
河南理工大学机械插床机构课程方案.docx
《河南理工大学机械插床机构课程方案.docx》由会员分享,可在线阅读,更多相关《河南理工大学机械插床机构课程方案.docx(17页珍藏版)》请在冰豆网上搜索。
河南理工大学机械插床机构课程方案
河南理工大学机械原理插床课设
一、设计题目简介
插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。
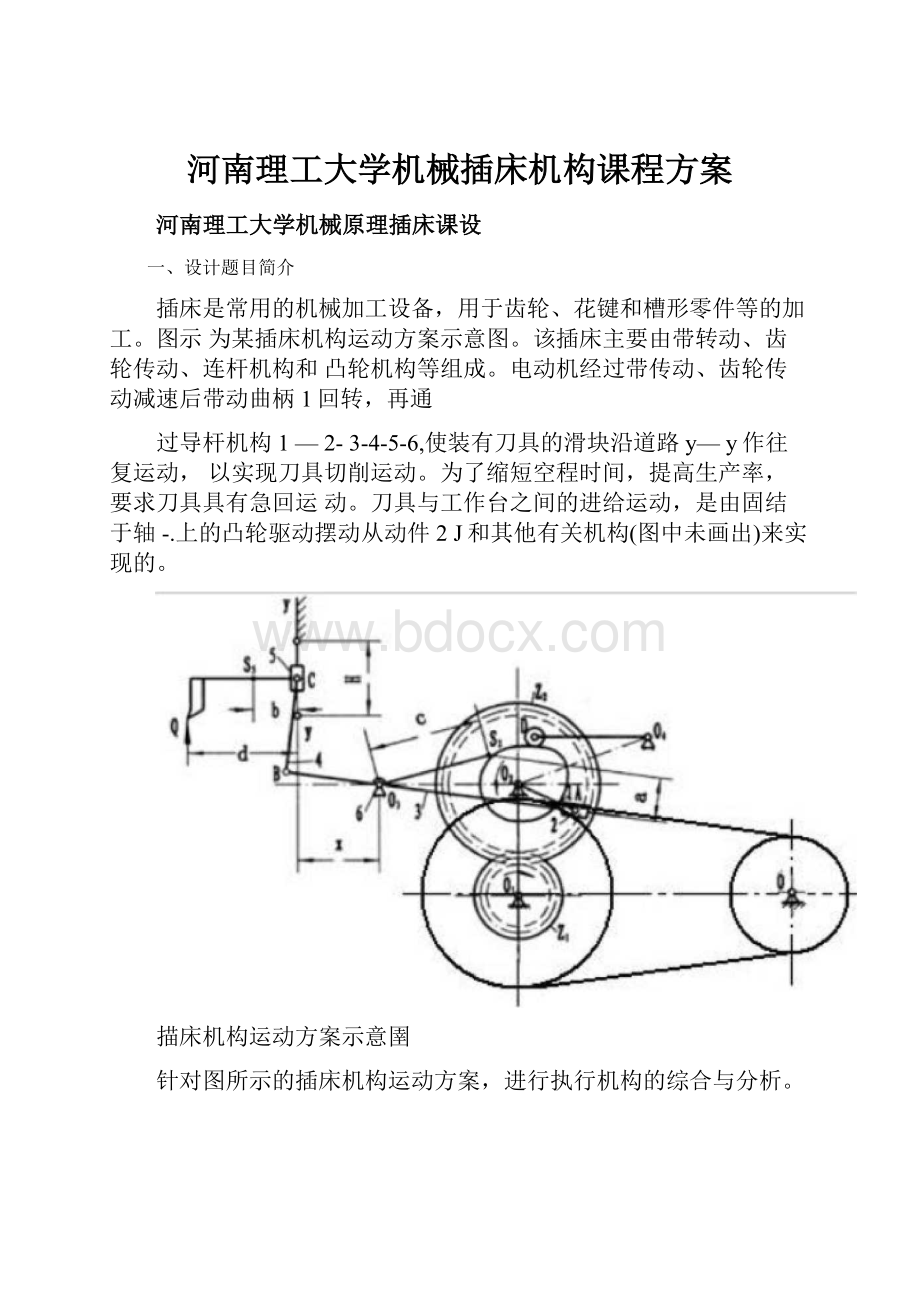
图示为某插床机构运动方案示意图。
该插床主要由带转动、齿轮传动、连杆机构和凸轮机构等组成。
电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通
过导杆机构1—2-3-4-5-6,使装有刀具的滑块沿道路y—y作往复运动,以实现刀具切削运动。
为了缩短空程时间,提高生产率,要求刀具具有急回运动。
刀具与工作台之间的进给运动,是由固结于轴-.上的凸轮驱动摆动从动件2J和其他有关机构(图中未画出)来实现的。
描床机构运动方案示意圉
针对图所示的插床机构运动方案,进行执行机构的综合与分析。
二、设计数据与要求
依据插床工况条件的限制,预先确定了有关几何尺寸和力学参数,如表6-4所示。
要
求所设计的插床结构紧凑,机械效率高。
插床机构设计数据
插刀往复次数丹(次/min)
120
插刀往复行程7/(mm)
60
插削机构行程速比系数K
2
中心距(mm)
130
杆长之比匚存%
1
质心坐标Q(mm)
45
质心坐标B(mm)
45
质心坐标f(mm)
115
凸轮摆杆长度也(mm)
125
凸轮摆杆行程角0(°)
15
推程许用压力角[心](°)
45
推程运动角专(°)
90
回程运动角4(°)
60
远程休止角"(°)
15
推程运动规律
3-4-5次多项式
回程运动规律
等速
速度不均匀系数/
0.03
最大切削阻力Q(N)
2000
阻力力臂d(mm)
120
滑块5重力Q(N)
320
构件3重力G;(N)
120
构件3转动惯量禺(kgm2)
0.1
三、设计任务
1.针对图所示的插床的执行机构(插削机构和送料机构)方案,依据设计要求和已知参数,确定各构件的运动尺寸,绘制机构运动简图;
2.假设曲柄1等速转动,画出滑块C的位移和速度的变化规律曲线;
3.在插床工作过程中,插刀所受的阻力变化曲线如图所示,在不考虑各处摩
擦、其他构件重力和惯性力的条件下,分析曲柄所需的驱动力矩;
4.取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量;
5.用软件(VBMATLABADAM或SOLIDWORK等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
6.图纸上绘出最终方案的机构运动简图(可以是计算机图)并编写说明书
设计过程
一、工作原理
插床是常用的机械加工设备,用于齿轮、花键和槽形零件等的加工。
插床主要由齿轮机构、导杆机构和凸轮机构等组成,主要由带传动、齿轮传动、连杆机构和凸轮机构等组成。
电动机经过带传动、齿轮传动减速后带动曲柄1回
转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y—y作往复运动,以实现刀具切削运动。
刀具与工作台之间的进给运动,是由固结于轴
亠上的凸轮驱动摆动从动件和其他有关机构来实现的。
插床机构可分为两部分:
(1)插削机构:
主要由导杆构成。
电动机经过带传动、齿轮传动减速后带动曲柄1回转,再通过导杆机构1-2-3-4-5-6,使装有刀具的滑块沿道路y—y作往复运动。
根据机构见图得自由度F=53-72=1,如图所示:
图3插削机构简图
(2)送料机构:
由凸轮及其他有关机构构成。
凸轮固定在°?
上,凸轮转动带
动从动件O4D(如图1)和其他有关构件运动,使工作台进行前后、左右和圆周方向的间歇进给运动。
二、根据草图确定各构件的运动该尺寸,绘制机构简图
1■插削机构的设计:
由题目可知,齿轮传动减速后带动曲柄1回转,当相切时滑块5达到其极限位
置。
简记h=lo2A,〔3=lo3B,J=lBC,〔6=Io2o3,X=1。
。
3,根据已知条件,可以分别确定其尺寸。
(1)计算极位角二和导杆3的摆角。
由已知条件知:
插削机构行程速比系数K为2
180°=60°
K+1
(2)求li
由已知条件知:
中心距16=1。
2。
3=130
屮1
l1=l6sin13065
22
(3)求l3,l4
两杆的杆长之比为1,插刀的往复行程H
为了使构件4对构件5的平均传动角比较大,应有如下关系:
屮
X-I3C0SI3-X,则可以得:
2
1屮
x=_l3(cos—+1)
1
1,
x=56
由此得出丿
y=30
所得数据如下表:
x(mm)
56
y(mm)
30
L1(mm)
65
L3(mm)
60
L4(mm)
60
2■凸轮机构的设计
推程运动为3-4-5次多项式,推程运动角=90°,回程运动为等速运动,回程运动角」=60°,凸轮摆杆的行程角的行程角,-15°,凸轮摆杆的长度IOd=125,推程许用压力角[:
]0_450。
需要求的是凸轮基圆半径R,滚子半径r和lOO
根据以上条件列出运动方程
推程:
护3®4甲5
'■='-m[10(,)-15(.)6(.)]
m兀80®3240申4丄192申5
■1[34厂]
23
出”nr240®960®
■'i[
JI
12
Id°4(1—「max)
sin(900--m0-[:
]0)
由此得出Ioo=85,2***
三、假设曲柄1等速转动,画出滑块C的位移和速度的变化规律曲
线;
由矢量闭合得出如下方程:
lO3O2Qa=lO3A
Io3bIbc=xyS5
分别投影得出如下方程:
S3cos3二l^l1cos1s^sn3二I1sn1
yS5
13cos3-l4cos4二xi3sn3i4sn4=
-3sin=3-S3Sin=3-岂3cos=300岂
Scos^
S3cos日3_空3sin日3
0
0
1l%l
10
1
-J3cos日3
l4⑷4cos日4
0
K
•0
-y3sin日3
-If4sin日4
T一
一
根据以上万程在MATLAB中编写如下程序作出C的位移、速度、加速度的变化规律曲线。
symsq1q3q4s3s5
q1=0:
pi/180:
2*pi。
q3=atan(65*sin(q1)./(130+65*cos(q1)))。
q3=0:
pi/6。
q4=acos(60*cos((atan(65*sin(q1)./(130+65*cos(q1))))-56)/60)。
s5=60*sin(q3)+60*sin(q4)。
plot(q1,s5,'r')。
grid。
title('滑块的位移曲线')。
xlabel('曲柄1的转角91')。
ylabel('滑块的位移s5')v5=diff(s5)。
plot(v5)。
grid。
title('滑块的速度曲线')。
xlabel('曲柄1的转角91')。
ylabel('滑块的速度v5')。
a5=diff(v5)。
plot(a5,'c')。
grid。
title('滑块的加速度曲线')。
xlabel('曲柄1的转角91')。
ylabel('滑块的加速度a5')。
由此程序得出相关图:
60
/
/
/
\
r/
/
\
/
\
滑块的位移曲线
1
2
34
567
曲柄1的转角91
ooO
5435S移位的块滑
oO
21
0.4
5
v
度速的块滑
滑块的速度曲线
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
50
100
150
200
250300350
曲柄1的转角01
400
滑块的加速度曲线
0.025
0.02
0.015
0.01
0.005
-0.005
-0.01
-0.015
-0.02
-0.025
50
100
300
350
150200250
曲柄1的转角01
5a度速加的块滑
\
Ji
t
"1
一______
s^_
、
\
\/
0
400
四、在插床工作过程中,插刀所受的阻力变化曲线如图2所示,在不
考虑各处摩擦、其他构件重力和惯性力的条件,分析曲柄所需的驱动
力矩。
1.根据理论力学以及理论力学相关知识.列出以下表达式
dj
2dj
Ter
Vs5
2dj
mNs3as3j333m5Vs5as5
o
1
当曲柄旋转时可以由上公式可以得出以下数据:
二(度)Ted(N.m)
e
0
10
20
30
40
50
Ted
147.7851
141.2404
133.1889
122.0764
108.2949
92.271
e
60
70
80
90
1001
110
Ted
74.45434
55.31369
35.34378
15.08588
1.276596
11.48795
e
120
130
140
150
1601
170
Ted
25.05672
44.0959
71.38969
107.3844
139.3778
129.0814
e
180
190
200
210
220
230
Ted
55.4567
-74.3289
-91.7908
-65.0962
-35.1491
-15.1063
e
240
250
260
:
270
280j
290
Ted
-3.86511
1.774533
4.077446
25.38515
51.42832
75.08479
e
300
310
320
330
340j
350
Ted
96.03819
113.9072
128.3351
139.0449
145.8685
148.7582
五、取曲柄轴为等效构件,确定应加于曲柄轴上的飞轮转动惯量
36
36Tedi
,由此可以求出加于曲柄轴上的平均驱动力矩
Ted=59.8341N.m
Jf
W=[W]=△Wmaxr△Wmin=(Md-Mr)d
%
把平均力矩带入后求得
Jf二38.18862Kg.m2
六、用Solidworks对执行机构仿真后,画出输出机构的位移、速度、
加速度图如下:
仿真机构简图
位移图
PSPS-1•呂-1自N呂N503.呂W5G4.呂严5中5.•呂SSJ曽0
珮&注專■5SA-.
质心速度-Yfrnm^sec)
24F
■13aiM
T醉吉杜
平动位移•Y(mm)
JCQ讀冨
口
-S2呂WS3S
蛊曲脅一
■S*営豈
・22
口=口0.S-.0=L5O2,002ub口30口
3酗〔器2
BW®
珮&專'于甘,1
WS40口4m0WS
n替矚•|<5&・1
七、感想与建议
感想:
在设计过程中采用分块设计方法可以使问题得到简化口:
1、将整个插床机构分为插削机构和送料机构,而插削机构又以六杆机构为主,依据插床工况条件的限制,题中预先确定了有关几何尺寸和力学参数,因此在满足所设计的插床结构紧凑,机械效率高的前提下设计了其他相应参数。
设计送料机构凸轮时,由于回程角比较小,若为简单的等速回程过程,则会出现尖点失真现象,故设计时将将回程规律做了一定修正。
在此假设了机构的效率,电机等速特性等,以便简化问题,且同时其对设计目的影响较小。
在整个设计过程中我们在分析清楚题目要求后讨论最佳解法并通过相关软件(例如MATLAB)来解
决。
先做好分析后着手做设计具体细节达到了事半功倍的效果。
另外由于知识的有限,将许多模型简化了也必将对设计造成一定负面影响。
建议:
希望老师能在以后的课程设计过程中,能给大家讲解一些在设计时理应注意的相关问题,并给大家推荐一些设计书籍供学生参考学习,以保证我们的课程设计能达到预期的目的和要求。
八、参考文献。
《机械原理》冯鉴何俊雷智翔编西南交大出版社2008
《机械原理课程设计》王淑仁主编北京-科学出版社2006
《MATLAB7.0程序设计语言》同时还参考了中国知网上面关于插床机构的相关论文


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 河南 理工大学 机械 插床 机构 课程 方案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《JAVA编程基础》课程标准软件16级.docx
《JAVA编程基础》课程标准软件16级.docx
-
《分数的初步认识》.docx
-
《金属钠的性质与应用》教学设计.docx
-
《蚕妇》.docx
-
《会计》教材Word版第14章非货币性资产交换.docx
-
《与朱元思书》教学案例及反思.docx
-
《小壁虎借尾巴 》教案.docx
-
1第一部分 辅导员岗位基本知识.docx
-
09年CFO复习题.docx
-
2G1计算书.docx
-
17 古诗五首夜雨寄北一等奖教案.docx
-
240T15mw机组整体启动方案解析.docx
-
485总线设计方案加上位机扩展.docx
-
Aspose Word模板使用总结.docx
-
CDMA掉话分析.docx
-
C++新闻信息管理系统.docx
-
《HSE管理体系的策划与运行》.docx
-
c语言改错题及答案.docx
-
CMS7000使用说明资料.docx
-
《财经法规与会计职业道德》模拟卷考试试题及答案资料.docx
-
《大众传播媒介的更新》教案2.docx
-
《教育知识与能力》中学版全国教师资格考试复习资料教学教材.docx
-
EPC施工组织设计1.docx
-
ERP在服装行业的信息化应用可行性研究报告.docx
-
《项羽之死》教案人教版高二选修教学设计.docx
-
《公共关系实务》总复习资料.docx
-
FLUKE744过程校准仪经典实例免费给大家会让你未来的道路更通达.docx
-
《护士条例》试题.docx
-
2F男鞋统装规范84.docx
-
4测试用例修复方法与工具.docx
-
MC尼龙轮项目可行性研究报告.docx
-
Weblogic Server系统管理手册.docx
-
学年度黑龙江省哈尔滨六中高二下学期期末考试地理docWord格式.docx
-
悬挑脚手架拆除方案Word格式.docx
-
学年天津市武清区杨村一中高一上学期期中考试生物试题解析版Word下载.docx
-
学校固定资产管理制度范文Word文件下载.docx
-
一年级下册海洋教育备课Word下载.docx
-
张先戏剧鉴赏考试答案Word格式文档下载.docx
-
学年广东省珠海市普通高中上学期高一语文月考试题10 Word版含答案Word格式文档下载.docx
-
用WMP12+Win7codecs实现高清播放Word文件下载.docx
-
议论文专项专练文档格式.docx
-
中国当代教育的病根 邓晓芒Word文件下载.docx
-
学年最新人教版九年级数学第一学期期末模拟综合测试及答案解析精编试题Word文件下载.docx
-
学年浙江省温州市新力量联盟联考高二上学期期末英语试题解析版 听力文档格式.docx
-
招远市学年第一学期期末考试初三物理试题及答案Word文档格式.docx
-
学年陕西省黄陵中学高新部高一下学期开学考试生物试题word版含答案Word下载.docx
-
愚人节的由来Word文档格式.docx
-
浙江省初中毕业升学考试科学试题温州市卷Word下载.docx
-
学生会开会发言稿共8篇Word文档格式.docx
-
语基复赛题527Word格式.docx
-
一笔画第1至10关攻略Word文件下载.docx
