 职业技能大赛:工业机器人系统操作员三级(高级)理论知识考核要素细目表(征求意见稿).docx
职业技能大赛:工业机器人系统操作员三级(高级)理论知识考核要素细目表(征求意见稿).docx
- 文档编号:11910068
- 上传时间:2023-04-13
- 格式:DOCX
- 页数:10
- 大小:41.06KB
职业技能大赛:工业机器人系统操作员三级(高级)理论知识考核要素细目表(征求意见稿).docx
《职业技能大赛:工业机器人系统操作员三级(高级)理论知识考核要素细目表(征求意见稿).docx》由会员分享,可在线阅读,更多相关《职业技能大赛:工业机器人系统操作员三级(高级)理论知识考核要素细目表(征求意见稿).docx(10页珍藏版)》请在冰豆网上搜索。
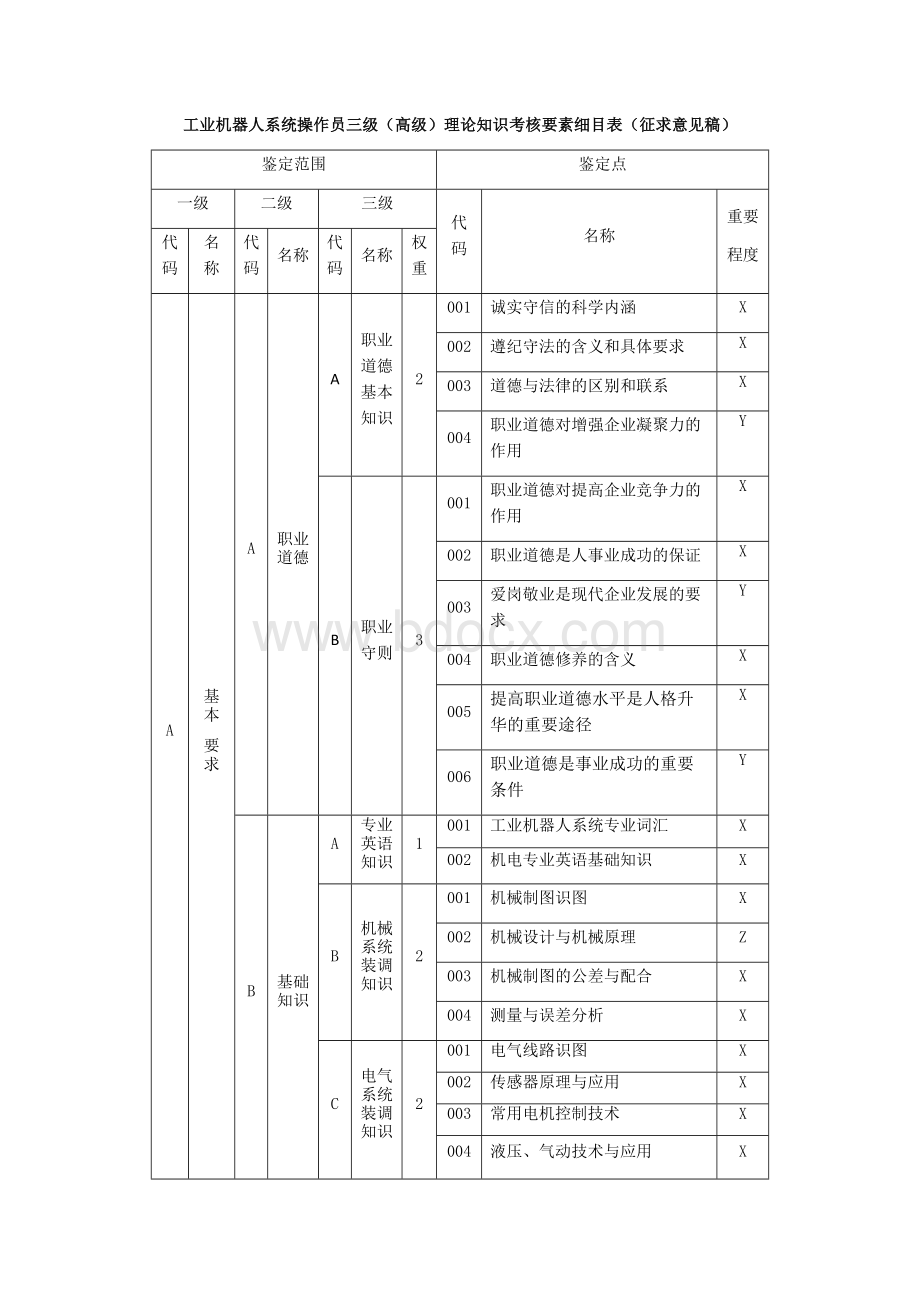
工业机器人系统操作员三级(高级)理论知识考核要素细目表(征求意见稿)
鉴定范围
鉴定点
一级
二级
三级
代码
名称
重要
程度
代码
名称
代码
名称
代码
名称
权重
A
基本
要求
A
职业道德
A
职业道德基本知识
2
001
诚实守信的科学内涵
X
002
遵纪守法的含义和具体要求
X
003
道德与法律的区别和联系
X
004
职业道德对增强企业凝聚力的作用
Y
B
职业守则
3
001
职业道德对提高企业竞争力的作用
X
002
职业道德是人事业成功的保证
X
003
爱岗敬业是现代企业发展的要求
Y
004
职业道德修养的含义
X
005
提高职业道德水平是人格升华的重要途径
X
006
职业道德是事业成功的重要条件
Y
B
基础知识
A
专业英语知识
1
001
工业机器人系统专业词汇
X
002
机电专业英语基础知识
X
B
机械系统装调知识
2
001
机械制图识图
X
002
机械设计与机械原理
Z
003
机械制图的公差与配合
X
004
测量与误差分析
X
C
电气系统装调知识
2
001
电气线路识图
X
002
传感器原理与应用
X
003
常用电机控制技术
X
004
液压、气动技术与应用
X
D
工业机器人系统操作知识
2
001
工具坐标定义
X
002
工件坐标定义
X
003
工业总线定义
X
004
工业视觉定义
X
E
安全生产与环境保护知识
1
001
安全防护物品使用
X
002
自动运行安全操作方法
X
F
质量管理知识
1
001
企业质量管理内容
X
002
岗位质量管理要求
Y
G
相关法律法规知识
1
001
安全生产工作
X
002
保护环境措施
Y
B
相关知识要求
A
机械系统装调
A
机械系统总装准备
6
001
工业机器人工作站识读
X
002
工业机器人系统总装配图识读
X
003
工业机器人工作站或系统的总装配工艺文件识读
X
004
工业机器人工作站或系统的组成识读
X
005
工业机器人控制系统接插头界面
X
006
工业机器人系统设定
X
007
工业机器人示教编程与操作
Y
008
常用装配工具和工装夹具的使用方法
X
009
常用装配仪器的使用方法
X
010
安装调压阀、流量阀等液压和气动元件
X
011
识别气源和液压源接口,连接液压和气动系统
X
012
装配和更换数控机床、变位机等设备的工装夹具
X
B
机械系统总装
6
001
按照总装配图及工艺文件,准备总装零部件
X
002
安装相机、镜头、光源等机器视觉装置功能部件
X
003
调节液压系统流量
X
004
调节气动系统压力
X
005
检查变位机旋转角度、移动平台、送丝系统等周边配套设备的功能
Z
006
机械装配工具的使用方法
X
007
工装夹具的使用方法
X
008
机器人本体结构及安装方法
X
009
末端执行器装配方法
X
010
末端执行器自动更换系统装配方法
X
011
液压与气压传动系统元件使用方法
X
012
安全防护装置装配方法
X
C
机械系统总装功能检查与调试
8
001
机器人末端执行器与周边配套设备之间位置的调整
Z
002
机械部件装调记录单的填写方法
X
003
机器人工作站或系统的总装配图识图方法
X
004
机器人工作站或系统的组成和装配方法
X
005
机器视觉系统部件功能的调整
X
006
机器视觉装置功能部件选择与装配方法
X
007
液压和气动回路的调试方法
X
008
周边配套设备功能的调试方法
X
009
机器视觉系统功能部件使用与调试方法
X
010
传感器安装和使用方法
X
011
机械总装调试记录单的填写方法
X
012
机械、电气装配工艺与操作
Z
013
工业机器人重复定位精度
X
014
机器人工作站或系统的组成和装配方法
X
015
周边配套设备装配方法
X
016
工业机器人系统网络通信参数设定
X
B
电气系统装调
A
电气系统装配
10
001
可编程控制器装配方法
X
002
伺服装置装配方法
X
003
步进装置装配方法
X
004
变频装置装配方法
X
005
人机交互装置装配方法
X
006
电器元件的装配方法
X
007
开关电源的装配方法
X
008
伺服放大器装配方法
X
009
机器人系统外部急停回路连接方法
X
010
机器人系统安全回路连接方法
X
011
机器人工作站外部急停回路连接方法
X
012
机器人工作站安全回路连接方法
X
013
机器人工作站控制线路连接方法
X
014
机器人系统控制线路连接方法
X
015
机器人工作站急停使用规范
X
016
机器人工作站安全操作规范
X
017
机器人系统急停使用规范
X
018
机器人系统安全操作规范
X
019
电气系统装配规范
X
020
电气接线的安全标准
X
B
电气系统功能
检查与调试
10
001
机器人电气系统短路检测方法
X
002
机器人电气系统接地检测方法
X
003
机器人电气系统电阻检测方法
X
004
传感器的分类
Y
005
传感器信号测试方法
X
006
机器人外部传感器测试方法
X
007
PLC参数设置方法
X
008
伺服装置参数设置方法
X
009
步进装置参数设置方法
X
010
变频装置参数设置方法
X
011
人机交互概念
Z
012
人机交互装置参数设置方法
X
013
机器人视觉概念
Z
014
机器人视觉相机分类
Y
015
机器人视觉相机调试规范
X
016
机器人视觉系统通信方法
X
017
机器人视觉标定方法
Y
018
机器人工作站安全检测方法
X
019
机器人工作站安全检测规范
X
020
机器人参数传入控制器方法
X
C
系统操作与编程调试
A
系统操作与设定
15
001
三点法创建工具坐标系
X
002
四点法创建工具坐标系
X
003
六点法创建工具坐标系
X
004
直接输入法创建工具坐标系
X
005
三点法创建工件坐标系
X
006
四点法创建工件坐标系
X
007
直接输入法创建工件坐标系
X
008
工具坐标系标定
X
009
工具坐标系修改
X
010
工件坐标系标定
X
011
工件坐标系修改
X
012
负载参数设置
Y
013
附加轴控制软件包
Z
014
旋转型附加轴
X
015
直线型附加轴
X
016
系统输入输出信号
X
017
本地自动运行
X
018
远程自动运行
X
019
程序连续运行
X
020
示教器有效开关
X
021
控制柜模式切换
X
022
组输入信号
X
023
组输出信号
X
024
急停信号设置方法
X
025
Profinet通信设置
Z
026
ModBusTCP通信协议设置
X
027
程序的导入、导出设置
X
028
机器人重复定位精度的定义
Y
029
机器人重复定位精度测试的工具
Y
030
机器人重复定位精度测试的方法
X
B
示教编程与调试
20
001
机器人输入、输出信号
X
002
机器人位置数据
X
003
机器人运行状态
X
004
机器人运动轨迹
X
005
机器人程序调整
X
006
利用示教器控制移动平台
X
007
利用示教器控制变位机
X
008
手动控制外部轴
X
009
外部轴控制程序
X
010
组掩码设置
X
011
机器人搬运工作站编程编制
X
012
机器人搬运工作站程序调试
X
013
机器人码垛工作站编程编制
X
014
机器人码垛工作站程序调试
X
015
机器人焊接工作站编程编制
X
016
机器人焊接工作站程序调试
X
017
机器人喷涂工作站编程编制
X
018
机器人喷涂工作站程序调试
X
019
机器人装配工作站编程编制
X
020
机器人装配工作站程序调试
X
021
机器人打磨工作站编程编制
X
022
机器人打磨工作站程序调试
X
023
机器视觉的定义
Y
024
机器视觉的优势
Z
025
机器视觉系统的分类
Y
026
机器视觉系统的组成
Z
027
机器视觉软件画面
Y
028
机器视觉项目创建
X
029
机器视觉定位检测
X
030
机器视觉缺陷检测
X
031
机器视觉尺寸测量
X
032
2D视觉的定义
Y
033
3D视觉的定义
Y
034
机器人的作业位姿优化
X
035
机器人的运动轨迹优化
X
036
机器人的工艺参数优化
X
037
机器人的运行程序优化
X
038
示教器报警功能
X
039
机器人电池电量低报警
X
040
机器人安全防护装置
X
C
离线编程与仿真
10
001
仿真软件的安装
Y
002
创建仿真工程文件
X
003
创建机器人系统
X
004
创建仿真工作站
X
005
仿真软件菜单栏
X
006
仿真软件标题栏
X
007
仿真软件工具栏
X
008
仿真软件状态栏
X
009
虚拟示教器打开方式
X
010
外部模型的导入
X
011
内部模型的导入
X
012
设置机器人工具
X
013
在仿真软件中移动三维模型
X
014
在仿真软件中旋转三维模型
X
015
在仿真软件中测量三维模型
Y
016
编制机器人运动轨迹
X
017
利用特征识别生成轨迹
X
018
机器人运行程序的生成
X
019
离线程序的修正
X
020
导出机器人离线程序
X
附录:
(1)说明:
鉴定点的重要程度是指每个鉴定点在所属鉴定范围中的相对重要性水平,它反映了每个鉴定点与其他鉴定点相对重要程度。
其中X为最重要的核心要素,为职业活动必备知识点,占85.5%;Y为一般要素,占9.5%;Z为辅助性要素,占5%。
(2)本职业题库开发中使用的参考教材资料:
序号
教材名称
出版社
主编
书号
1
FANUC工业机器人离线编程与应用
机械工业出版社
黄维
9787111661313
2
工业机器人入门实用教程(KUKA机器人)
人民邮电出版社
张明文
9787115520296
3
工业机器人应用编程(FANUC)初级
机械工业出版社
陈晓明、霍永红、项万明
9787111686521
4
工业机器人现场编程
人民交通出版社
项万明
9787114155680
5
工业机器人编程与操作实训
高等教育出版社
崔陵、霍永红、项万明
9787040552140
6
机电设备电气安装与调试
科学出版社
崔陵、霍永红、项万明
9787030583345
7
电气控制线路
化学工业出版社
韩雪涛
9787122349217


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 职业技能 大赛 工业 机器人 系统 操作员 三级 高级 理论知识 考核 要素 细目 征求意见
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《铁皮石斛生产全产业链管控技术规范》(报批稿).docx
《铁皮石斛生产全产业链管控技术规范》(报批稿).docx
-
《茭白生产全产业链管控技术规范》.doc
-
《马铃薯设施生产技术规程》(报批稿).doc
-
《辣椒生产全产业链管控技术规范》征求意见稿.doc
-
村级消防规范标准.docx
-
城市市容环境卫生门前责任制管理规范.docx
-
基本医疗卫生服务投诉处理规范.docx
-
附子生产技术规范.doc
-
村卫生室基本医疗卫生服务满意度测评规范.docx
-
开展农村家庭环境“六净一规范”专项行动实施方案.docx
-
规范农村宅基地审批管理工作实施方案.doc
-
农村集体经济组织换届及规范运行管理工作方案.docx
-
黄颡鱼养殖技术规范.doc
-
山东省交通工程技术人才职称评价标准条件(自2019年起施行有效期至2024年).docx
-
农贸(集贸)市场新型冠状病毒环境监测技术规范 (2).docx
-
生猪养殖场非洲猪瘟消毒技术规范.docx
-
居家无障碍设施改造技术规范.docx
-
山东省交通工程技术人才职称评价标准条件(2021年1月1日起施行,有效期至2025年12月31日).doc
-
通信电力管线规范整治工作行动方案.docx
-
山东省快递工程技术人才高级职称评价标准条件(试行)(2021年起,有效期至2025年).docx
-
突发事件应急预案制修编规范标准(试行).doc
-
浙江省公共数据开放技术规范.docx
-
《香榧育苗栽培技术规范(征求意见稿)》.doc
-
推进全县小学生规范汉字书写教育的实施方案.docx
-
规范全县农业灌溉用电收费行为的实施方案.docx
-
农贸(集贸)市场新型冠状病毒环境监测技术规范.docx
-
石材加工防尘技术规范.docx
-
意蜂大棚专用授粉蜂群组配技术规程.doc
-
初榨油茶籽油生产技术规范.docx
-
1--山东省工业和信息化领域工程技术人才高级职称评价标准条件(2021年1月1日起施行,有效期至2025年12月31日).docx
-
县域矛盾纠纷调处化解数字化闭环管理规范.doc
-
电磁辐射环境自动监测技术规范(浙江省).doc
-
湖北省城市规划编制单位一览表.docx
-
路基施工安全监理细则标准版.docx
-
基于ASPENPLUS平台的生物质氧气气化制备合成气的模拟精.docx
-
遂平一高高三周练理科综合能力测试试题18.docx
-
市房产管理局领导班子述职报告doc.docx
-
质量工程师理论与实务真题.docx
-
学生寒假社会实践心得体会 3篇.docx
 中职生物化学课件完整.ppt
中职生物化学课件完整.ppt
-
科学技术奖一等奖16项.docx
-
111册按偏旁分类.docx
-
初中生话题作文创新示范汇总doc 46页.docx
-
(最新)500KV高压线附近施工安全防护方案.doc
-
四级听力高频词汇.docx
-
高考考点120个文言实词集锦.docx
-
工程造价审计事务所建筑工程造价论文8000字2篇.docx
-
语文校本教材.docx
-
对联知识大全.docx
-
最近心情不好的说说.docx
-
江苏省如皋市高二语文上学期期末教学质量调研试题.docx
