 发那科系统变量详解文档格式.docx
发那科系统变量详解文档格式.docx
- 文档编号:13730866
- 上传时间:2022-10-13
- 格式:DOCX
- 页数:10
- 大小:27.45KB
发那科系统变量详解文档格式.docx
《发那科系统变量详解文档格式.docx》由会员分享,可在线阅读,更多相关《发那科系统变量详解文档格式.docx(10页珍藏版)》请在冰豆网上搜索。
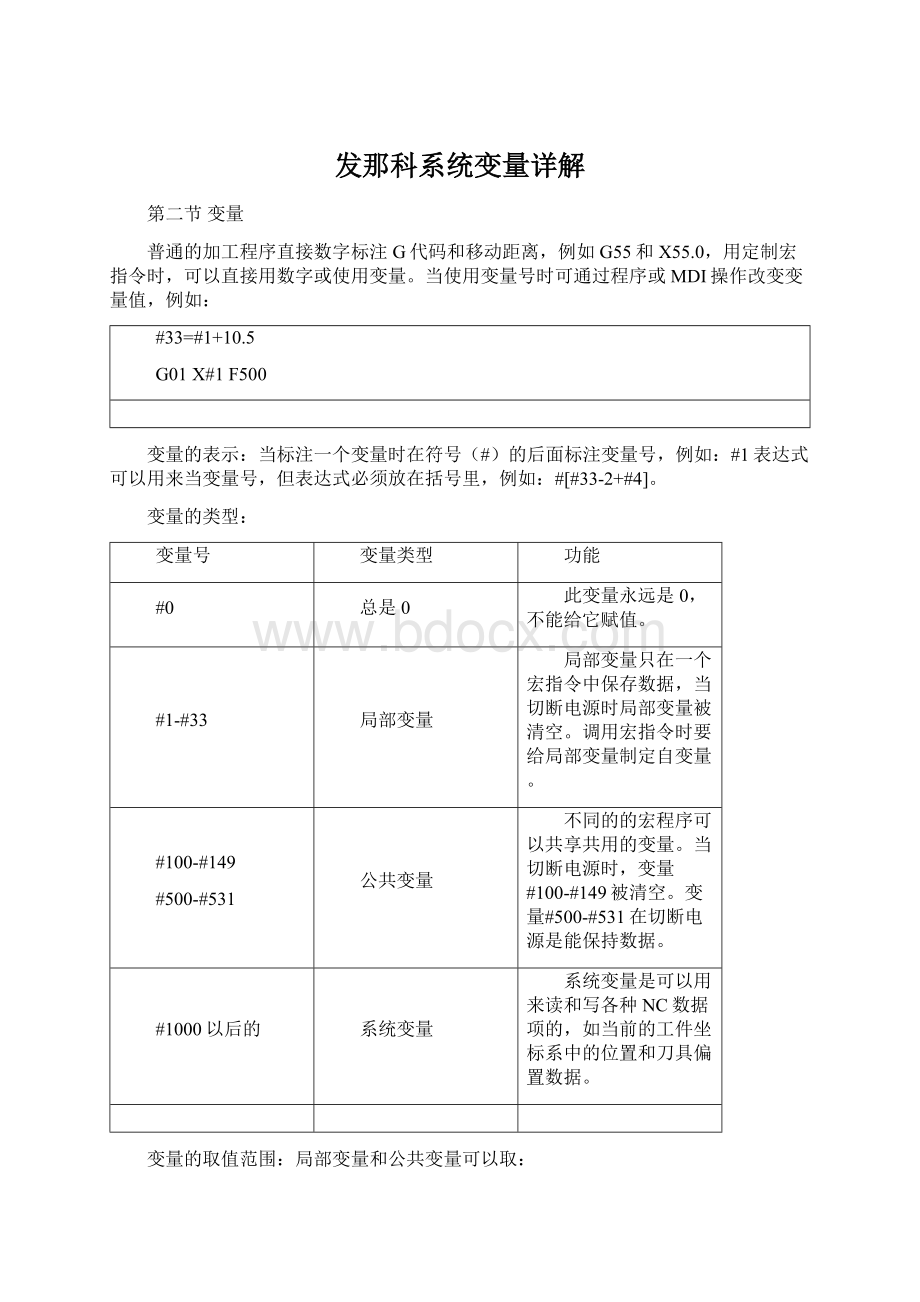
小数点的使用:
在程序中给变量进行赋值时,可以省略小数点。
例如:
#1=100;
意义就是;
变量#1的实际值是100.000。
变量的使用:
在程序中要使用一个变量值,在地址语句后面标注变量号即可,当用表达式标注变量时表达式要放在括号里,例如:
G02I[#1+#18]F#9;
在1/1000mm的增量系统中被使用的变量值的小数点后面第四位会被四舍五入。
#1=500.123678;
那么当执行G00X#1时实际的命令会被翻译成G00X500.124;
当使用了一个没有定义的变量时,该变量会被忽略。
例如#1=0;
#2的是空,那么当运行G00X#1Y#2;
时其结果是G00X0;
未定义的变量:
当没有给变量定义值时,该变量称为“空”变量。
变量#0永远是空变量。
它不能写,但能读。
比如:
除非用<
空>
代替否则<
等于0。
当#1=<
时
当#1=0时
G00X10Y#1
G00X10
G00X10Y0
#2=#1
#2=<
#2=0
#2=#1*10.5
#2=#1+#1
当用在条件表达式时:
只在EQ和NE时<
才不等同于0
当#1=<
#1EQ#0
确定
不确定
#1NE#0
#1GE#0
#1GT#0
变量不能不使用的情况:
程序号、顺序号、选择快的跳跃不能使用变量。
O#2;
/#3G00Z300.0;
N#9Y1000.0;
这种情况都是不可以的使用变量的。
第三节系统变量
可以用系统变量读和写CNC内部的数据,如当前的工件坐标系中的位置和刀具偏置数据。
有些系统变量只能读。
系统变量对编写自动化程序和通用程序十分重要。
关于界面信号的变量:
#1000-#1015
#1032
把16位信号从PMC送的用户宏程序,变量#1000到#1015用来逐位读信号,变量#1032用来一次读信号全部16位。
,
#1100-#1115
#1132
把16位信号从用户宏程序送的PMC,变量#1100到#1115用来逐位写信号,变量#1132用来一次写一个信号的全部16位。
#1133
变量#1133从宏程序一次写信号的全部16位送给PMC。
注意:
变量#1133可用值位-99999999到+99999999
关于刀具偏置值的变量:
用系统变量可以读和写刀具补偿值,可用的变量数目取决于偏置对数目,是在几何偏置和磨损偏置之间做区分,以及是否在刀具长度补偿值和半径补偿值之间作区分,当偏置对数目不大于200时,变量#2001到#2400也可以使用。
刀具偏置储存器C的系统变量
偏置号
刀具长度补偿(H)
刀具半径补偿(D)
几何补偿
磨损补偿
1
:
200
999
#11001(#2201)
#11201(#2400)
#11999
#10001(#2001)
#10201(#2200)
#10999
#13001
;
#13999
#12001
#12999
在应用宏程序编写加工程序时将会有以下形式的描述:
#1=#13001此时把1号刀的半径补偿值赋值给变量#1,若1刀的直径80mm那么此时#1=5.0
#2=#12001此时把1号刀的半径磨损值赋值给变量#2,若1刀的半径磨损0.15那么此时#2=0.15
关于宏报警的系统变量:
#3000
当一个0-200的值赋值给#3000时,CNC会停止并报警。
在一个表达式的后面跟着一条不超过26个字符的报警信息。
将3000与被赋予#3000的值相加变成报警号和报警信息一起在屏幕上显示出来。
#3000=6(TOOLNOTFOUND)报警信息显示为“3006TOOLNOTFOUND”(没有找到刀具)
#3000=15(Dfuzhicuowu)报警信息显示为“3015Dfuzhicuowu”
(D赋值错误)
以上都可以使用。
关于模态信息的系统变量:
#4001
#4002
#4003
#4004
#4005
#4006
#4007
#4008
#4009
#4010
#4011
#4012
#4013
#4014
#4015
#4016
:
#4022
#4102
#4107
#4109
#4111
#4113
#4114
#4115
#4119
#4120
#4130
G00,G01,G03,G33(01组)
G17,G18,G19(02组)
G90,G91(03组)
(04组)
G94,G95(05组)
G20,G21(06组)
G40,G41,G42(07组)
G43,G44,G49(08组)
G73,G74,G76,G80-G89(09组)
G98,G99(10组)
G50,G51(11组)
G65,G66,G67(12组)
G96,G97(13组)
G54-G59(14组)
G61-G64(15组)
G68,G69(16组)
:
(22组)
B码
D码
F码
H码
M码
顺序号
程序号
S码
T码
P码(实际选择的附加工件坐标系号)
当执行#1=#4014;
时,#1中的值是54、55、56、57、58或59。
关于当前位置信息的系统变量:
此系统变量不可以写,但可以读。
位置信息
坐标系
刀具补偿值
运动期间的读操作
#5001-#5008
程序块的终点
工件坐标系
不包括
能
#5021-#5028
当前的位置
机床坐标系
包括
不能
#5041-#5068
当前位置
#5061-#5068
跳跃信号位置
#5081-#5088
刀具长度补偿值
#5101-#5108
伺服位置偏差值
关于工件坐标系偏置值的系统变量:
此系统变量可以读写。
#5201
#5208
第1轴外部工件零点偏置值
:
第8轴外部工件零点偏置值
#5221
#5228
第1轴G54工件零点偏置值
第8轴G54工件零点偏置值
#5241
#5248
第1轴G55工件零点偏置值
第8轴G55工件零点偏置值
#5261
#5268
第1轴G56工件零点偏置值
第8轴G56工件零点偏置值
#5281
#5288
第1轴G57工件零点偏置值
第8轴G57工件零点偏置值
#5301
#5308
第1轴G58工件零点偏置值
第8轴G58工件零点偏置值
#5321
#5328
第1轴G59工件零点偏置值
第8轴G59工件零点偏置值
#7001
#7008
第1轴工件零点偏置值(G54.1P1)
第8轴工件零点偏置值
#7021
#7028
第1轴工件零点偏置值(G54.1P2)
#7941
#7948
第1轴工件零点偏置值(G54.1P48)
#14001
#14008
#14021
#14028
第1轴工件零点偏置值(G54.1P)
#19980
#19988
第1轴工件零点偏置值(G54.1P300)
下列变量也可以使用:
轴
第1轴
外部工件零点偏置
G54工件零点偏置
G55工件零点偏置
G56工件零点偏置
G57工件零点偏置
G58工件零点偏置
G59工件零点偏置
#2500
#2501
#2502
#2503
#2504
#2505
#2506
第2轴
#2600
#2601
#2602
#2603
#2604
#2605
#2606
#5202
#5222
#5242
#5262
#5282
#5302
#5322
第3轴
#2700
#2701
#2702
#2703
#2704
#2705
#2706
#5203
#5223
#5243
#5263
#5283
#5303
#5323
第4轴
#2800
#2801
#2802
#2803
#2804
#2805
#2806
#5204
#5224
#5244
#5264
#5284
#5304
#5324
#1=#2501;
那么这时#1等于G54坐标系中的第一轴的数据
#2501=-1500.0;
那么这时G54坐标系中的第一轴偏置值为-1500.0


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 系统 变量 详解
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 (完整word版)信息论与编码期末考试题----学生复习用.doc
(完整word版)信息论与编码期末考试题----学生复习用.doc
-
(完整)六年级上册几何图形题.docx
-
(完整)储罐防腐施工方案.doc
-
(完整word版)公务员录用体检表.doc
-
(完整)八年级上册几何证明题专项练习.doc
-
(决策管理)投资决策委员会实施细则.doc
-
(完整)四年级上册口算、竖式计算、脱式计算.doc
-
(压轴题)初中物理八年级上册第一章《机械运动》检测(含答案解析)(2).doc
-
(完整)小学三年级心理健康教案.doc
-
(完整)初中文言文翻译技巧.doc
-
(名师整理)语文中考《骆驼祥子》名著导读优秀教案.docx
-
(完整word版)偏旁部首名称大全.doc
-
(人教PEP)五年级英语竞赛试题及答案.doc
-
(完整)山东省普通高中学生综合素质评价信息管理系统操作手册学生用户手册.doc
-
(完整word版)体育课教案模板.doc
-
(住宅楼方案)房屋建筑学课程设计说明书.doc
-
(完整word版)《分数的意义》优秀教学设计(公开课).doc
-
(完整word版)安全生产标准化实施方案.doc
-
(完整)初中生人物形象分析常用词汇.doc
-
(完整版)借用公司资质协议.doc
-
(完整word版)仙剑奇侠传三图文攻略(最详细版).doc
-
(完整word版)历年陕西省专升本英语真题(答案解析超全).doc
-
(完整)四年级四则混合运算训练题100道.doc
-
(完整word版)学校团总支部换届选举方案.doc
-
(完整word版)安全标准化绩效评定计划.doc
-
(完整)分布式光伏发电项目施工组织设计.doc
-
(完整版)埋地塑料管结构环刚度计算.doc
-
(完整版)国家农业产业强镇示范建设实施方案.doc
-
(完整版)八年级数学上几何典型试题及答案.doc
-
(完整版)六年级音乐下册人音版理论知识梳理.doc
-
(完整版)囚徒健身图文教程和计划表(完美打印版).doc
 (完整版)固定资产盘点表.xls
(完整版)固定资产盘点表.xls
-
汽车是一个多学科.docx
-
文明安全交通第1套试题.docx
-
高中地理复习高考必知345个地理知识点 109.docx
-
邮件格式范文署名电子邮件格式写.docx
-
借读生入学保证书.docx
-
人教版八年级下册 历史与社会复习提纲.docx
-
汽车电器复习题答案.docx
-
感人的教育故事演讲稿感人的英语故事演讲稿.docx
-
环保水保监理实施细则.docx
-
建筑工程质量通病及预防措施.docx
-
垃圾填埋场库区施工组织设计.docx
-
省道竣工施工总结.docx
-
试验十五供应链单据财务单据生产凭证操作步骤及图示.docx
-
教育培训机构学校政教处教科工作计划范文.docx
-
期货从业资格考试期货法律法规记忆诀窍.docx
-
亲子活动主持稿汇总5篇范例.docx
-
华中师范大学各专业考研真题免费下载.docx
-
教学副校长个人述职述廉报告.docx
-
浅谈福建大剧院项目建设监理工作.docx
