 Siemens 840D数控编程Word文件下载.docx
Siemens 840D数控编程Word文件下载.docx
- 文档编号:14636632
- 上传时间:2022-10-23
- 格式:DOCX
- 页数:80
- 大小:1.13MB
Siemens 840D数控编程Word文件下载.docx
《Siemens 840D数控编程Word文件下载.docx》由会员分享,可在线阅读,更多相关《Siemens 840D数控编程Word文件下载.docx(80页珍藏版)》请在冰豆网上搜索。
在数控操作中所谓的“回零”回的就是此点。
?
机床原点(零点):
即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
坐标系:
在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
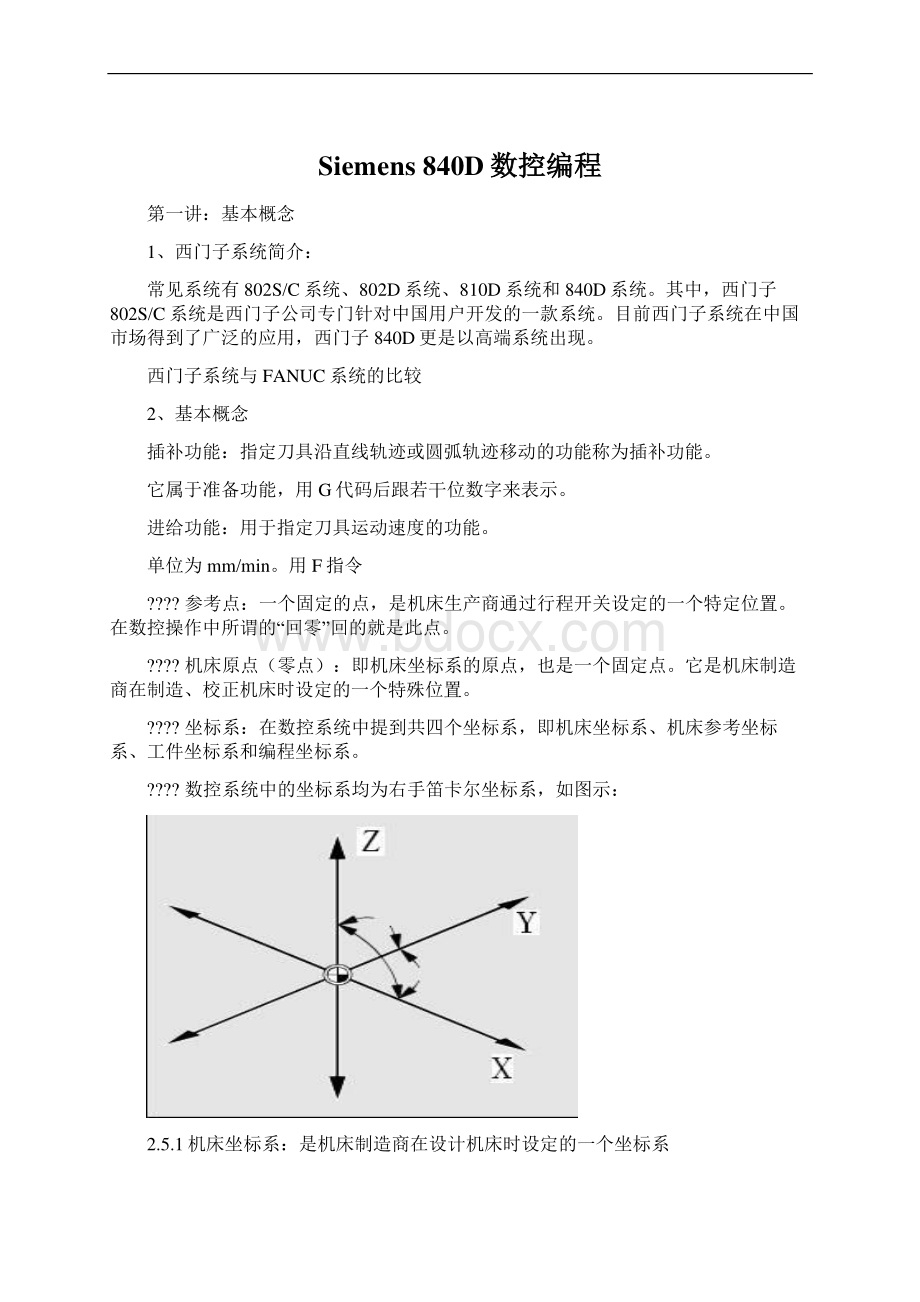
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:
2.5.1机床坐标系:
是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:
是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:
为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:
在程序编制过程中,在零件图纸上建立的坐标系主轴功能:
用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示切削速度:
切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/d其中:
S:
主轴转速V:
切削速度D:
刀具直径例:
假设用直径160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?
注:
进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是?
毫米/分钟辅助功能:
指令机床部件启停操作的功能。
用M指令表示主程序和子程序:
准备功能:
用来控制刀具(或工作台)运动轨迹的机能。
即G指令刀具长度与半径补偿功能:
极坐标:
以极点用圆周半径(极半径)和角度(极角)来表示工件的坐标的位置绝对尺寸、增量尺寸即所谓的G90G91模态、非模态用于说明指令的时效性,如果一个指令指定以后直到被同组的其他指令取代才失效,否则持续有效。
这样的指令即为具有模态第二讲:
准备功能1一、复习回顾:
提问:
数控机床中的坐标系是一个什么样的坐标系?
方向如何判断?
数控机床中的坐标系有哪些?
它们有什么异同?
二、新课:
1、西门子840D系统程序命名规则a、前一个符号必须是字母或数字(或一个字符有下划线)b、其余符号可以是字母、数字及下划线c、程序名最多有24个字符d、字符间不允许使用分隔符2、常见程序段格式NG.XYZFSDTM说明:
N程序段号G准备功能XYZ坐标终点F进给速度S主轴转速D刀沿号T刀具号M辅助功能3、平面选择指令每两个坐标轴确定一个平面。
第三个坐标轴始终垂直于该平面,并定义刀具进给深度(比如用于2?
D加工)。
在编程时要求告知控制系统在哪一个平面上加工,从而可以正确地计算刀具补偿。
对于确定的圆弧编程方式和极坐标系中,平面的定义同样很有必要。
指令格式:
G17、G18、G19G17:
XY平面G18:
YZ平面G19:
ZX平面4、G90/G91指令作用:
用于确定坐标输入方式指令格式:
G90绝对坐标输入G91增量坐标输入指令应用:
绝对坐标:
P1为X20Y35P2为X50Y60P3为X70Y20在相对尺寸系统中,点P1到P3的位置为:
P1为X20Y35(以零点为基准)P2为X30Y25以P1为基准P3为X20Y-40以P2为基准5、可设定零点偏置调用G54或者G55或者G56或者G57或者G505G599取消G53或者G500或者SUPA或者G153指令说明G53以程序段方式取消当前可设定零点偏移和可编程零点偏移。
G54bisG57调用第二个到第五个可设定零点偏移/框架G153以程序段方式抑制可设定、可编程和整个基本框架。
G500?
G500=零框架,标准设定,(不包括偏移、旋转、镜像或者标度)?
取消可设定零点偏移/框架(G54到G599),直至下一次调用。
激活整个基本框架($P_ACTBFRAME).?
G500不等于0?
激活第一个可设定的零点偏移/框架($P_UIFR0)和?
激活整个基本框架($P_ACTBFRAME),或者激活一个已修改的基本框架。
SUPA程序段方式取消,包括编程的偏移、手轮偏移(DRF)、外部零点偏移和PRESET偏移。
G505.G599调用第6到第99可设定的零点偏移。
功能通过可设定的零点偏移在所有轴中,工件零点以基本坐标系中的零点为基准进行调节。
这样可以通过G指令,在不同的程序之间调用不同夹具时的零点。
编程举例在此示例中有3个工件,它们分别固定在随行夹具中并与零点偏移值G54到G56相对应,一个一个进行加工。
N10G0G90X10Y10F500T1返回N20G54S1000M3调用第一个零点偏移,主轴右旋N30L47程序运行,在此作为子程序N40G55G0Z200调用第二个零点偏移Z,在障碍物之后N50L47程序作为子程序运行N60G56调用第三个零点偏移N70L47程序作为子程序运行N80G53X200Y300M30零点偏移抑制,程序结束6、公英制转换调用G70或者G71G700或者G710自软件版本SW5起指令说明G70英制尺寸说明(长度inch)G71公制尺寸说明(长度mm)G700英制尺寸说明(长度inch;
进给inch/minG710公制尺寸说明(长度mm;
进给mm/min)功能在生产图纸中工件相关的几何数据可以用公制尺寸编程,也可以用英制尺寸编程。
自软件版本SW5起,G70/G71功能可以用G700/G710扩展。
这里,除了几何尺寸之外,工艺尺寸诸如进给率F在零件程序执行过程中,也可以在通过G700/G710设定的尺寸系统中说明。
操作顺序G70或者G71下面的几何参数可以由控制系统(带必要的偏差)换算为没有设定的尺寸系统,从而可以直接输入(举例):
位移信息X,Y,Z,?
在圆弧编程时的中间点坐标I1,J1,K1插补参数I,J,K和圆弧半径CR?
螺距?
可编程的零点偏移(TRANS)?
极半径RP所有其它的参数,诸如进给、刀具补偿或者可设定零点偏移(使用G70/G71时)以主要尺寸系统说明(MD10240:
SCALING_SYSTEM_IS_METRIC)。
系统变量和机床数据的描述同样与G70/G71文本无关。
G700或者G710自软件版本SW5起,在使用G700/G710时与G70/G71相反,所有的进给均由控制系统在编程的尺寸系统中说明。
G700/G710代码在G70/G71相同的组中。
编程的进给值模态有效,因此在后面G70/G71/G700/G710转换时不能自动改变。
如果要求G70/G71/G700/G710中的进给值生效,则必须编程一个新F值。
编程举例在基本尺寸系统为公制时,在英制尺寸和公制尺寸之间进行交换(G70/G71)。
N10G0G94X20Y30Z2S2000M3T1基本尺寸系统公制N20G1Z-5F500Z轴进给mm/minN30X90N40G70位置以英制输入,G70一直有效,直至用G71撤销或者至程序结束。
N50N60G71X20Y30位置输入,单位毫米N70G0Z2M30快速移动,程序结束第三讲:
准备功能2一、复习回顾:
G70、G71在程序编制时会影响哪些数据?
G54G57(G54G59)指的是什么?
有什么用途?
1、快速定位指令G00编程:
G0XYZG0AP=RP=RTLIOF,RTLION(SW及更高版本)参数说明XYZ直角坐标的终点AP=极坐标的终点,这里指极角RP=极坐标的终点,这里指极半径RTLIOF用G0非线性的插补(每个轨迹轴作为单轴插补)RTLION用G0线性插补(轨迹轴共同插补)功能您可以通过快速运行进行刀具的快速定位,工件的绕行或者返回换刀位置。
这项功能不适用于工件加工!
操作顺序用G0来编程的刀具运行将以可能的最快速度运行(快速运行)。
在每个机床数据中,每个轴的快速运行速度都是单独定义的。
如果同时在多个轴上执行快速运行,那么快速运行速度由对轨迹运行所需时间最长的轴来决定。
其它说明G0模态有效。
铣削编程举例:
G0可以用于回到起始位置或者刀具换刀点,刀具空运转等等。
N10G90S400M3绝对尺寸,主轴顺时针N20G0X30Y20Z2回到起始位置N30G1Z-5F1000刀具横向进给N40X80Y65直线运行N50G0Z2N60G0X-20Y100Z100M30退刀,程序结束2、直线插补指令G01编程:
G1XYZFG1AP=RP=F参数说明XYZ直角坐标的终点AP=极坐标的终点,这里指极角RP=极坐标的终点,这里指极半径F进给率,单位为毫米/分钟功能刀具用G1在与轴平行,倾斜的或者在空间里任意摆放的直线方向上运动。
可以用直线插补功能加工3D平面,槽等。
操作顺序刀具以进给率F从当前起始点向编程的目标点直线运行。
工件在这个轨迹上进行加工。
您可以在直角坐标或者极坐标中给出目标点。
举例:
G1G90X100Y20Z30A40F100以进给100毫米/分钟的进给率逼近X,Y,Z上的目标点;
回转轴A作为同步轴来处理,以便能同时完成四个运动。
其它说明G1模态有效。
在加工时必须给出主轴转速S和主轴旋转方向M3/M4。
编程举例加工一个槽:
刀具沿X/Y方向从起始点向终点运行。
同时在Z方向横向进给。
N10G17S400M3选择工作平面,主轴顺时针N20G0X20Y20Z2回到起始位置N30G1Z-2F40刀具横向进给N40X80Y80Z-15沿一条倾斜方向的直线运行N50G0Z100M30空运转至刀具换刀3、圆弧插补指令编程:
G2/G3XYZIJKG2/G3AP=RP=G2/G3XYZCR=G2/G3AR=IJKG2/G3AR=XYZCIPXYZI1=J1=K1=CTXYZ指令和参数说明G2顺时针方向沿圆弧轨迹运行G3逆时针方向沿圆弧轨迹运行CIP通过中间点进行圆弧插补CT切线过渡的圆弧XYZ直角坐标系的终点IJK直角坐标系的圆弧圆心(在X,Y,Z方向)AP=极坐标的终点,这里指极角RP=极坐标的终点,这里指符合圆弧半径的极半径CR=圆弧半径AR=圆弧角I1=J1=K1=直角坐标的中间点(在X,Y,Z方向)功能圆弧插补允许对整圆或圆弧进行加工。
操作顺序工作平面说明控制系统需要工作平面参数以确定圆弧旋转方向(G17至G19),G2顺时针方向/G3逆时针方向。
最好是工作平面的普遍说明。
例外:
您也可以在选择的工作平面(不在圆弧角说明和螺旋线上)之外加工圆弧。
在这种情况下,作为圆弧终点给出的轴地址将决定圆弧平面。
其它说明G2/G3模态有效。
用圆心和终点进行圆弧编程圆弧运动通过以下几点来描述:
在直角坐标X,Y,Z中的终点和?
地址I,J,K上的圆弧圆心分别表示:
I:
圆弧中点在X方向的坐标J:
圆弧中点在Y方


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- Siemens 840D数控编程 840 数控 编程
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 (完整word版)信息论与编码期末考试题----学生复习用.doc
(完整word版)信息论与编码期末考试题----学生复习用.doc
-
(完整)六年级上册几何图形题.docx
-
(完整)储罐防腐施工方案.doc
-
(完整word版)公务员录用体检表.doc
-
(完整)八年级上册几何证明题专项练习.doc
-
(决策管理)投资决策委员会实施细则.doc
-
(完整)四年级上册口算、竖式计算、脱式计算.doc
-
(压轴题)初中物理八年级上册第一章《机械运动》检测(含答案解析)(2).doc
-
(完整)小学三年级心理健康教案.doc
-
(完整)初中文言文翻译技巧.doc
-
(名师整理)语文中考《骆驼祥子》名著导读优秀教案.docx
-
(完整word版)偏旁部首名称大全.doc
-
(人教PEP)五年级英语竞赛试题及答案.doc
-
(完整)山东省普通高中学生综合素质评价信息管理系统操作手册学生用户手册.doc
-
(完整word版)体育课教案模板.doc
-
(住宅楼方案)房屋建筑学课程设计说明书.doc
-
(完整word版)《分数的意义》优秀教学设计(公开课).doc
-
(完整word版)安全生产标准化实施方案.doc
-
(完整)初中生人物形象分析常用词汇.doc
-
(完整版)借用公司资质协议.doc
-
(完整word版)仙剑奇侠传三图文攻略(最详细版).doc
-
(完整word版)历年陕西省专升本英语真题(答案解析超全).doc
-
(完整)四年级四则混合运算训练题100道.doc
-
(完整word版)学校团总支部换届选举方案.doc
-
(完整word版)安全标准化绩效评定计划.doc
-
(完整)分布式光伏发电项目施工组织设计.doc
-
(完整版)埋地塑料管结构环刚度计算.doc
-
(完整版)国家农业产业强镇示范建设实施方案.doc
-
(完整版)八年级数学上几何典型试题及答案.doc
-
(完整版)六年级音乐下册人音版理论知识梳理.doc
-
(完整版)囚徒健身图文教程和计划表(完美打印版).doc
 (完整版)固定资产盘点表.xls
(完整版)固定资产盘点表.xls
-
金蝶专业版财务操作流程文档.docx
-
隧道机电设计说明.docx
-
市政工程扬尘治理专项方案.docx
-
竞选学生会主席的演讲稿范文通用10篇.docx
-
半年总结会董事长讲话.docx
-
室内给排水安装施工方案.docx
-
酒店项目可行性报告.docx
-
300MWp光伏电站项目安装工程施工组织设计.docx
-
本科精细化工实验方案.docx
-
山东省济宁市嘉祥县镇第一中学学年七年级上学期期中考试道德与法治试题.docx
-
深情的句子.docx
-
掘进专业试题库.docx
-
病理学技士基础知识考试大纲知识点.docx
-
生产运作计算题.docx
-
预埋式和直插式光纤现场连接器的技术比对.docx
-
残疾学生送教上门帮扶工作记录表.docx
-
院感各种监测表格模板汇总1.docx
-
LPC语音合成实验报告.docx
-
常见的机器学习数学知识点.docx
