 基于遗传算法的机器人路径规划Word下载.doc
基于遗传算法的机器人路径规划Word下载.doc
- 文档编号:15505924
- 上传时间:2022-11-02
- 格式:DOC
- 页数:7
- 大小:128KB
基于遗传算法的机器人路径规划Word下载.doc
《基于遗传算法的机器人路径规划Word下载.doc》由会员分享,可在线阅读,更多相关《基于遗传算法的机器人路径规划Word下载.doc(7页珍藏版)》请在冰豆网上搜索。
遗传算法是一种鲁棒性的应用于复杂系统优化的查询式算法,遗传算法与其他只能优化算法相比时,他有以下特点:
(1)把决策变量编码化,以一编码做算法处理的对象。
(2)在算法里面以计算出的适应值为查询其他数据的信息。
(3)遗传算法的查询过程从一个种群开始查询,而不从一个一个体开始。
(4)遗传算法的查询是一种依据概率查询,而非确定值查询。
。
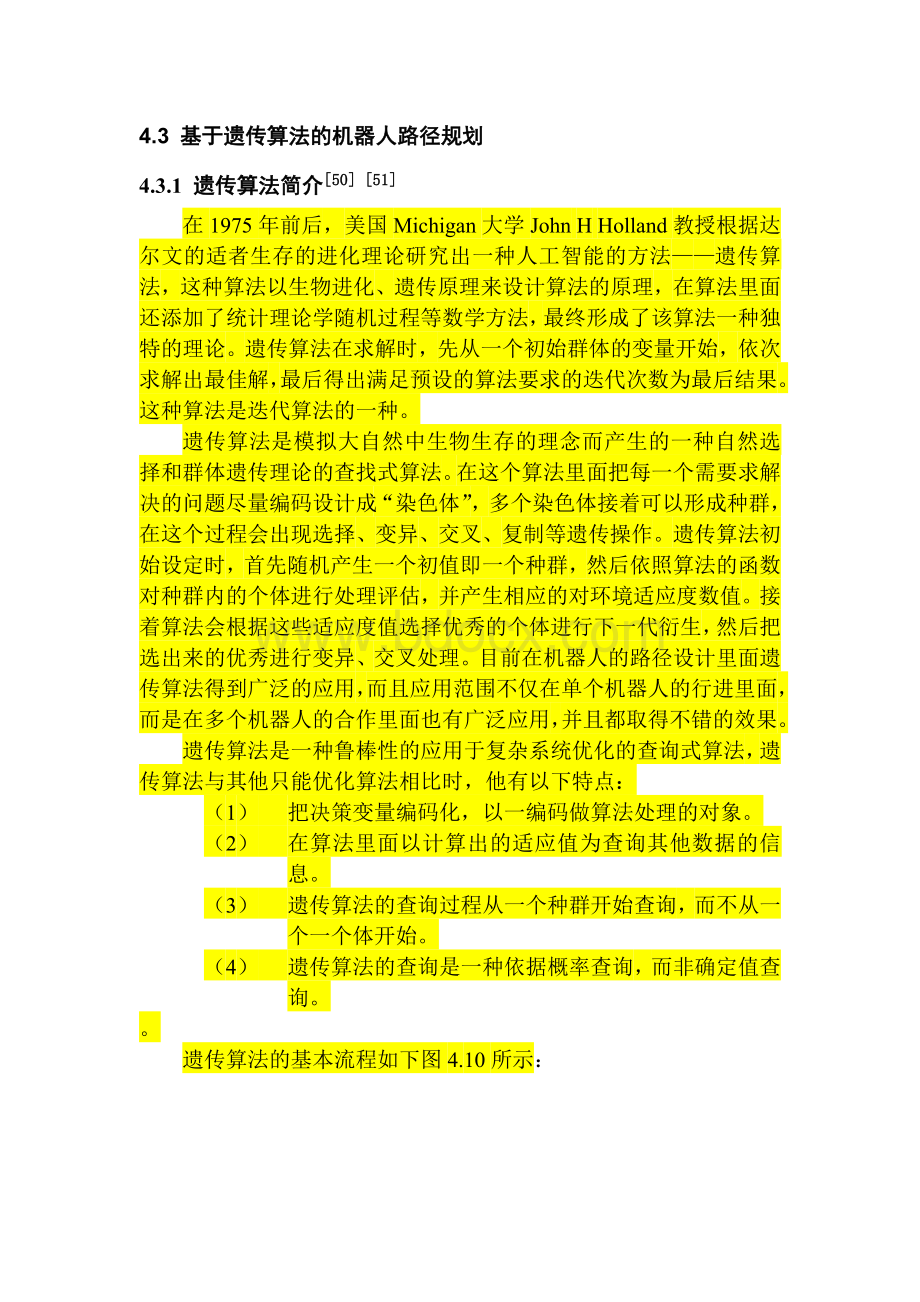
遗传算法的基本流程如下图4.10所示:
随机产生初始种群
计算各个体适应值
执行复制操作
按交叉概率执行交叉操作
按变异概率执行变异操作
输出搜索结果
算法收敛准则满足否
是
否
图4.10基本遗传算法的流程图
4.3.2利用遗传算法进行路径规划
4.3.2.1规划空间的栅格法建模
假设机器人工作空间为二维结构化空间,障碍物位置、大小已知,且在机器人运动过程中,障碍物的位置、大小均不发生变化。
用尺寸相同的栅格对机器人二维工作空间进行划分,栅格大小以机器人能在其内自由运动为限。
若某一栅格尺寸范围内不含任何障碍物,则称此栅格为自由栅格,反之,称为障碍栅格。
自由空间和障碍物均可表示成栅格块的集合。
对划分好的栅格编序号,划分后的机器人工作空间如图4-11所示,图中阴影区为障碍物。
栅格标识可采用下述两种方法:
(1)直角坐标法。
如图1所示,以栅格阵左上角为坐标原点,水平向右为轴正方向,竖直向下为轴正方向,每一栅格区间对应坐标轴上的一个单位长度。
任一栅格均可用直角坐标()唯一标识。
图4.11规划空间及仿真结果之一
(2)序号法。
如图4.11所示,按从左到右,从上到下的顺序,从栅格阵左上角第一个栅格开始,给每一个栅格一个序号(从零开始计),则序号与栅格块一一对应。
上述两种标识,互为映射关系:
(4-26)
或
(4-27)
(4-27)式中,mod表示取之余数,int表示取之整数。
在下述讨论中,机器人运动路径的表示将采用序号法,因为序号较直角坐标节省内存,表述简洁明了,并且便于遗传算子的操作。
在对路径进行评价时,则将序号转换成坐标形式,因为坐标法更便于表示栅格之间的相对位置,计算路径长度及检验路径可行性[52]。
4.3.2.2路径规划方法
1.个体编码
个体表示机器人在其工作空间中的一条运动路径。
编码即是把一个问题的可行解从其解空间转换到遗传算法所能处理的搜索空间的转换方法。
编码方法可分为三大类:
二进制编码方法、浮点数编码方法、符号编码方法。
本文采用路径上的一系列栅格序号的顺序排列来表示机器人的一条可移动路径的遗传编码,机器人由起始位置S沿图中粗实线运动到终点位置G的路径,表示成一个个体,即:
{0,1,11,21,22,23,33,44,55,65,66,67,68,78,88,99}。
由于机器人运动路径可变,因此,个体长度不确定。
计算机仿真研究中,用个体最大可能长度作为个体数组维数。
2.初始种群产生
初始种群是遗传算法进化计算的起点,它由一定数目(称种群大小)的个体组成。
为了保证遗传算法的全局最优性,初始种群应尽可能随机分布在搜索空间中每一个区域。
当对机器人工作空间划分的栅格数目较大时,产生初始种群并非易事。
若采用人工选择法,则费时费力;
若采用计算机随机生成法,则由于路径具有目的性、无障碍性,使得路径生成算法比较困难。
为此,引入间断无障碍路径概念。
定义 在机器人运动起点S到终点G之间,用一系列随机选择、自由,但不一定连续的栅格序号连接S和G,称为一条间断无障碍路径。
据上述定义,下面则为几条间断无障碍路径:
{0,99},{0,20,45,75,87,99},{0,11,23,43,54,65,75,85,95,97,99},采用间断无障碍路径作为遗传算法初始种群,可以减少初始种群产生的困难。
3.适应度函数
个体适应度评价函数的选择影响到遗传算法的计算效率。
文献[52]选取如下所示的个体适应度评价函数:
(4-28)
式(4-28)中:
为该个体所通过的栅格数目总和,为该个体中相邻序号栅格之间的直线距离之和。
从评价函数F的定义式(4-28)可见,F与机器人运动距离D成正比,因此,该优化以距离最短作为目标函数。
但是,若仅取运动距离D作为评价函数,则个体{0,99}的目标值最小,而且经过几代迭代后,此类个体数目将会增多,这并非是所期望的,因此,式(4-28)中引入了一个修正项,它的主要目的是尽量消除遗传运算过程中产生的间断点相距太远的过短路径。
4.遗传算子
(1)选择算子采用比例选择算子,将种群中的个体进行适应值评价后,使个体按一定概率向下一代繁殖。
(2)交叉算子分通常意义上的交叉和重合点交叉两种方式。
所谓重合点交叉是指对随机选取的两个个体,选择栅格序号完全相同的点进行交叉操作,当重合点多于一个时,随机选择其一进行交叉,当无重合点时,不进行交叉操作。
显然常规交叉操作易产生间断路径,而重合点交叉不会产生新的断点。
(3)变异算子分三种变异操作,个体中随机删除一个路径点;
在个体中随机选择一个节点,用另一个随机产生的点代替;
在个体中随机选择一个节点前插入一个新节点.显见,三种变异算子都可能产生间断路径,所以引入以下两种算子。
(4)插入算子将间断路径用自由节点弥补,使之成为连续路径。
判断个体中两相邻序号,是否连续,可采用下述方法:
(4-29)
(4-29)式中,、、、分别为、对应的直角坐标,用(4-27)式计算;
max,abs分别代表取最大值和取绝对值操作。
若,则与连续,否则不连续。
不连续时,按中值法计算候补插入点:
(4-30)
(4-30)式中,int表示取整操作。
若计算得到的为自由栅格,可直接插入。
若是障碍栅格,则选择一个与距离最近的自由栅格作为新的侯补插入点。
若找不到新的侯补插入点,即宣告插入失败,舍去该个体,否则,用新的侯补插入点补充到与之间。
上述插入过程可重复,直到个体变成连续可通行路径或因找不到新的侯补插入点而舍去该个体为止。
(5)删除算子插入自由栅格的操作可能会使路径中出现重复节点,删除目的是删除路径中冗余节点,将同一个体中两相同节点之间的节点以及两相同节点中的一个一并舍去。
4.3.3仿真研究[53]
对图4.11和图4.12所示的两种情况分别进行了计算机仿真研究,在这两种情况下,机器人运动起点S和终点G之栅格序号均为0和99。
所采用的遗传算法运行参数完全相同:
图中粗实线所示分别为迭代了40代和45代之后所得到的最优运动路径。
图4.12规划空间及仿真结果之二
4.3.3结论
本研究表明,采用栅格序号作为遗传算法的编码形式,与传统的二进制编码方法比较,具有编码位数少、长度短、易于遗传算子操作等优点,更适合于机器人路径规划。
提出的间断无障碍路径新概念,既简化了初始种群产生,又方便了交叉、变异遗传算子的操作。
插入和删除算子一方面弥补间断路径,使其变成连续可通行路径;
另一方面避免机器人运动路径重复,缩短运动时间。
4.4小结
本章首先分析了两轮驱动足球机器人的运动学和动力学模型,然后介绍了运用PID模糊算法实现了足球机器人的运动控制,最后介绍了基于遗传算法的基本思想,针对机器人的路径规划的问题,研究并实现了利用遗传算法进行路径规划。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 遗传 算法 机器人 路径 规划
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 保育笔记.doc
保育笔记.doc
-
北京地区成人学士学位英语统一考试真题及答案.docx
-
幼儿园外出活动安全应急预案.doc
-
形容词变副词规律.doc
-
新概念英语第一册阶段测试题(01--12).doc
-
中班幼儿发展分析报告.doc
-
新概念英语第一册Lesson1-20测试题.doc
-
幼儿园安全教育宣传稿2-3月份.doc
-
描写山水风光的古诗词.doc
-
大学英语B题库阅读四.doc
 幼儿园日常安全检查记录表.xls
幼儿园日常安全检查记录表.xls
-
汽车涂装术语中英文对照.xls
-
1993年全国高考数学试题.doc
-
-简谐运动的图像.doc
-
幼儿园教职工安全培训记录.wps
-
世界主要国家及首都对照表(中英文).doc
-
-渗透作用原理说课稿.doc
-
电大远程网络教育大学英语B统考题库真题.doc
-
2010年江苏省高考化学试卷及解析.doc
-
2012年辽宁省高考数学试卷(文科)答案与解析.doc
-
2006年全国化学竞赛初赛模拟试卷(02).doc
-
幼儿园一日常规检查记录表.xls
-
自考英语二教材课文讲义unit.docx
-
全国高等教育自学考试英语词汇学试题及答案.doc
-
18年高考真题理科数学(全国2卷).doc
-
2008高中化学竞赛初赛模拟试卷(11).doc
-
2012年6月福建省高中生物会考试题.doc
-
1989年全国高考数学文科.doc
-
1994年全国高考数学试题.doc
-
2011年浙江普通高中学业水平考试通用技术试卷及答案.doc
-
1997年全国高中学生化学竞赛(初赛)试题.doc
-
2011年辽宁省高考数学试卷(理科)答案与解析.doc
-
B超医生个人年终总结三篇范文.docx
-
《我爱唠叨的妈妈》读书笔记.docx
-
60岁祝寿贺词.docx
-
爱心援助的倡议书.docx
-
毕业生应聘自我介绍范文.docx
-
《现代教育理论》的读书心得体会.docx
-
C语言程序设计实习心得体会实习心得体会.docx
-
安全生产工作计划.docx
-
毕业自我评价怎么写?.docx
-
《邪不压正》观后感.docx
-
安全教育和安全防范管理工作责任书责任书.docx
-
标杆班组建设汇报材料范文模板.docx
-
安全学习心得体会范文.docx
-
4s店月工作总结.docx
-
八年级班主任工作总结范文大全.docx
-
播音主持面试自我介绍范文集合6篇.docx
-
八年级班主任工作计划范例.docx
-
ktv管理工作年终总结.docx
-
八年级教学总结教学工作总结.docx
