 TwinCAT基础教程11 TwinCAT背景知识Word下载.docx
TwinCAT基础教程11 TwinCAT背景知识Word下载.docx
- 文档编号:17695852
- 上传时间:2022-12-08
- 格式:DOCX
- 页数:4
- 大小:1.47MB
TwinCAT基础教程11 TwinCAT背景知识Word下载.docx
《TwinCAT基础教程11 TwinCAT背景知识Word下载.docx》由会员分享,可在线阅读,更多相关《TwinCAT基础教程11 TwinCAT背景知识Word下载.docx(4页珍藏版)》请在冰豆网上搜索。
简单总结:
EtherCAT就是一种总线技术,具有速度快,稳定性高,布线简单等优点,详细可以参考下面这个PPT(不是说其他总线就不行,只是说这个很优秀)
TwinCAT就是贝福推出的基于PC的软PLC软件,软PLC可以摆脱传统PLC的编程复杂(比如懂西门子的不懂三菱,台达甚至国产的PLC,而且软PLC支持多种语言混合使用,支持类似于高级语言一样的面向对象的开发方法,调试也会变得比较简单),价格昂贵(软PLC只需要一台传统电脑就可以写程序和测试程序,仿真等等无需硬件)。
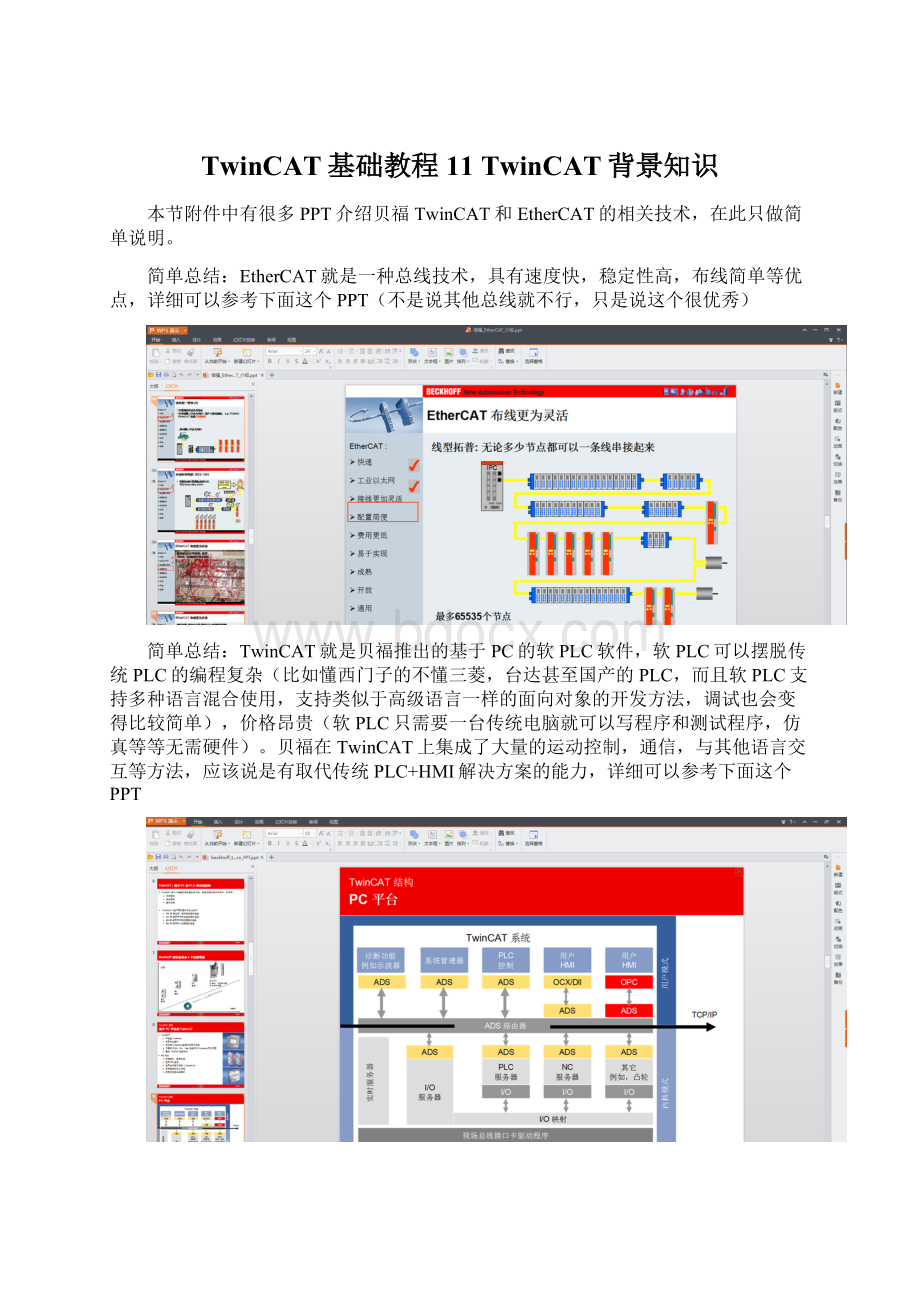
贝福在TwinCAT上集成了大量的运动控制,通信,与其他语言交互等方法,应该说是有取代传统PLC+HMI解决方案的能力,详细可以参考下面这个PPT
贝福推出了TwinCAT3,相比于之前的TwinCAT2,软件直接集成到了VisualStudio中,而且支持C++,具有更高的开发效率和兼容性(当然用惯了TwinCAT2的人可能不这样认为),但是整体来看确实比TwinCAT2好用一点。
本系列教程也会以TwinCAT3为主做范例(个人感觉在TC3写好之后再移植到TC2上去,也比直接在TC2上写方便,主要是TC3的价格和商务策略问题,而TC2的盗版比较多,很多屌丝最后做项目可能还是得用TC2,不管是TC2还是TC3,使用方法和能实现的功能大致相同,所以没有必要纠结先学哪个)
市面上支持EtherCAT的控制器会越来越多,比如固高和凌华(只不过价格太高,稳定性也有待验证)。
但是总的发展趋势是以EtherCAT为主流通讯方式的软PLC编程将逐渐取代传统的脉冲形式运动控制器或者运动控制卡,因为不管是从工程师编程效率,还是整个项目的综合成本,可靠性考虑,软PLC都更有发展潜力。
传统伺服驱动器,包括国产的都会将EtherCAT作为标配(本文后续的应用教程仍然使用性价比和可靠性较高的松下伺服作为范例,也懒得搞一个国产伺服驱动器的图片了),使用EtherCAT驱动器,可以省掉运动控制卡到驱动器的CN1接口和线,取而代之的是网线,并且项目中用到的驱动器越多优势越明显(各大展会上做控制器的厂家都会排一排伺服驱动器,网线像串灯泡一样从头串到尾,显得很简洁很牛逼,其实你也可以)
更多教学视频和资料下载,欢迎关注以下信息:
我的优酷空间:
我的在线论坛:
问题交流:
QQ:
910358960
邮箱:
acetaohai123@


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- TwinCAT基础教程11 TwinCAT背景知识 TwinCAT 基础教程 11 背景 知识
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
我最喜欢的玩具Word格式文档下载.docx
-
江苏省一级妇幼保健院评审标准及细则第二周期Word格式.docx
-
现代汉语专题形成性考核册14答案电大Word文档格式.docx
-
中职车工专业理论试题文档格式.docx
-
主持词范文学校话剧晚会主持词范例三篇Word文件下载.docx
-
泰安市小学素质教育质量效益双高工程评估方案Word格式文档下载.docx
-
足球的规则讲解文档格式.docx
-
学年北京市西城区高一上学期期末考试地理 试题Word格式文档下载.docx
-
土力学简答题答案2Word文档下载推荐.docx
-
学年最新仁爱版七年级英语上学期期中模拟检测题及答案精编试题Word文件下载.docx
-
完整word版房屋建筑学试题库含答案word文档良心出品Word文件下载.docx
-
幼儿园及车库建筑工程重大危险源控制措施及实施方案Word文档下载推荐.docx
-
一年级下学期操行评语Word格式文档下载.docx
-
最新某品牌天猫专卖店运营投入实施项目商业计划书Word格式.docx
-
完整word版小学科技节活动总结10篇推荐文档Word文档格式.docx
-
物料捆绑防跑防滑安全技术措施Word文件下载.docx
-
最适合学生唱的英文歌曲全套汇编Word文档格式.docx
-
幼儿园优质课《欢迎秋爷爷》教案Word文档下载推荐.docx
-
文秘工作实习报告6篇最新Word文档格式.docx
