 电动车控制程序.doc
电动车控制程序.doc
- 文档编号:2604587
- 上传时间:2022-11-03
- 格式:DOC
- 页数:4
- 大小:50.50KB
电动车控制程序.doc
《电动车控制程序.doc》由会员分享,可在线阅读,更多相关《电动车控制程序.doc(4页珍藏版)》请在冰豆网上搜索。
程序的功能结构和修改说明
1、包含的功能:
目前Winbond提供的电动车控制器程序已经实现电动自行车的功能,如下:
1)、刹车;
2)、速度调节;
3)、限流保护;
4)、过流中断保护功能;
5)、欠压保护;
6)、1+1助力;
7)、巡航功能;
8)、堵转保护功能;
9)、EABS功能;
10)、最大速度限制选择:
2、程序结构
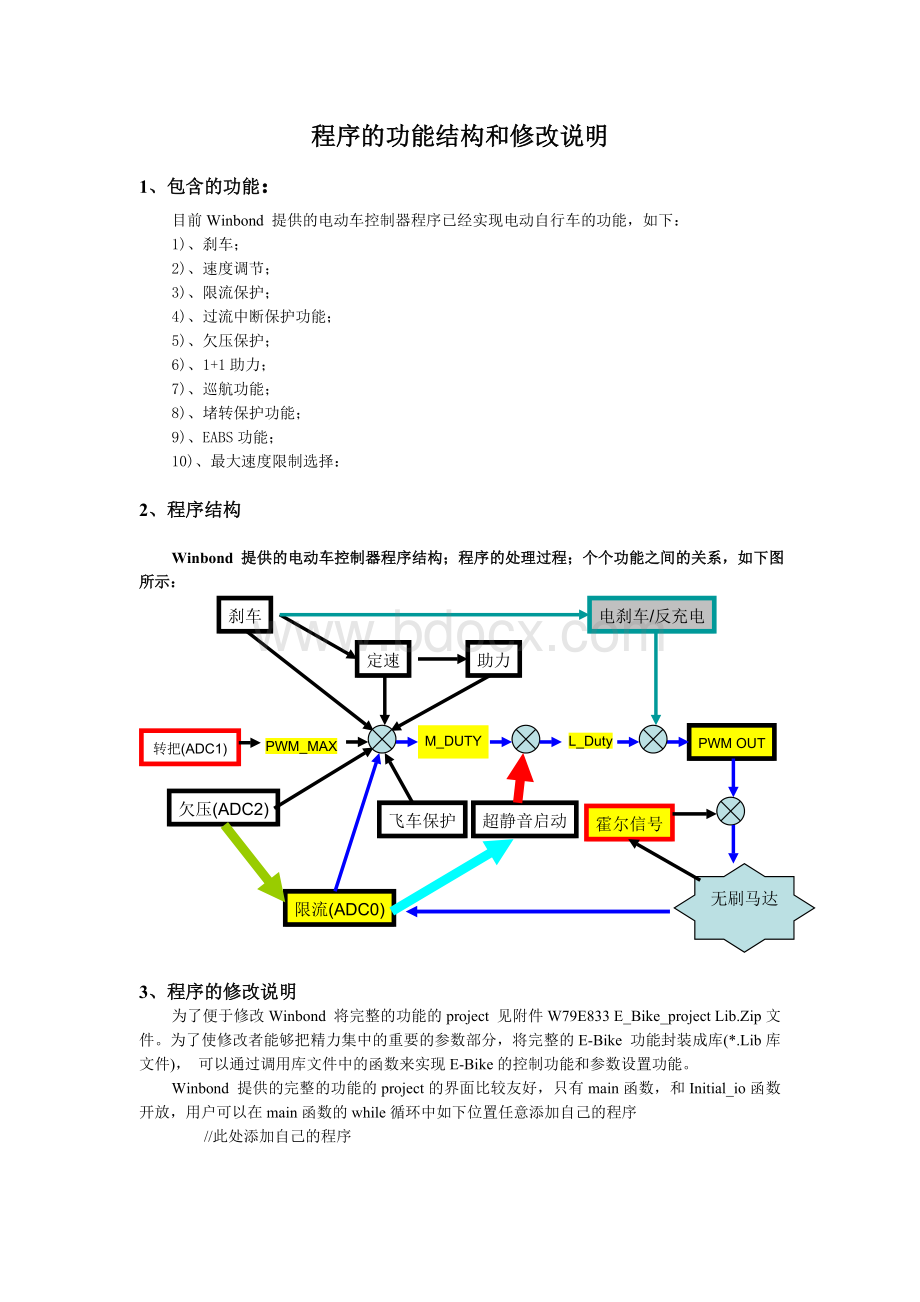
Winbond提供的电动车控制器程序结构;程序的处理过程;个个功能之间的关系,如下图所示:
转把(ADC1)
刹车
PWM_MAX
定速
助力
M_DUTY
L_Duty
PWMOUT
欠压(ADC2)
限流(ADC0)
飞车保护
电刹车/反充电
超静音启动
无刷马达
霍尔信号
3、程序的修改说明
为了便于修改Winbond将完整的功能的project见附件W79E833E_Bike_projectLib.Zip文件。
为了使修改者能够把精力集中的重要的参数部分,将完整的E-Bike功能封装成库(*.Lib库文件),可以通过调用库文件中的函数来实现E-Bike的控制功能和参数设置功能。
Winbond提供的完整的功能的project的界面比较友好,只有main函数,和Initial_io函数开放,用户可以在main函数的while循环中如下位置任意添加自己的程序
//此处添加自己的程序
//添加自己的程序结束
Init_IO();使设置I/O状态的函数,在该函数中客户可以根据自己的意愿设置I/O的状态(注意:
在修改程序时没有涉及到的I/O,不要改变它的状态;否则后果自负)。
下面的内容包括:
函数的定义和说明,主函数及其说明。
//----------------------函数定义-------------------------//
//***初始化函数***//
voidInit(void);
//***初始化端口函数***//
voidInit_IO(void);
//***霍尔信号采样函数***//
voidH_Sample(void);
//***相位变换函数***//
voidPhase_Change(void);
//***自助力函数***//
voidAutoHelpEN(bitA_EN,unsignedintA_Duty,unsignedcharA_Time);
/*
第一个参数设定助力功能允许与否,1为允许,0为禁止
第二个参数设定助力力量(PWM占空比),数值范围:
0~0x355,数值越大,力量越大
第三个参数设定助力时间,数值越大,时间越长
*/
//***巡航定速函数***//
voidKeep_SpeedEN(bitK_EN,unsignedcharK_Time,unsignedcharK_LowSpeed);
/*
第一个参数设定定速巡航功能允许与否,1为允许,0为禁止
第二个参数设定定速巡航最低速设置
第三个参数设定在巡航点保持多长时间后才进入巡航
*/
//***限流值设定函数***//
voidCurrent_Lim(unsignedintCM);
/*
过流保护上限值设定
0xB00对应限电流最大大约为2.6A
0xB80对应限流值最大大约为3.8A
*/
//***欠压保护设定函数***//
voidLowVoltage_Lim(unsignedintCM);
/*
欠压保护下限值设定
电池电压为47.9V时ADC采样值为0xB6==>0xB60
推算电池电压为41V时的采样值为0x9B==>0x9B0
推算电池电压为40V时的采样值为0x98==>0x980
*/
//***EABS设定函数***//
voidEABS_Set(bitEBS_EN,bitEBB_EN);
/*
第一个参数为滑行充电功能使能,1为允许,0为禁止
第二个参数为电刹车功能使能,1为允许,0为禁止
*/
//***硬件控制最大速度***//
voidSpeed_LimHW(bitSG1,bitSG2,bitSG3,bitSG4);
/*
参数只能有一个为1。
第一个参数对应15km/h
第二个参数对应20km/h
第三个参数对应30km/h
第四个参数对应40km/h
*/
//***软件控制最大速度***//
voidSpeed_LimSW(unsignedcharSG);
/*
参数数值由0x00~0x20,数值越小速度越大,反之则越小
*/
//--------------------函数定义结束--------------------------//
/*****************************************************************************
* 主函数
******************************************************************************/
voidmain(void)
{
//***初始化***//
Init();
//***初始化端口***//
Init_IO();
//***霍尔信号采样***//
H_Sample();
//***相位变换***//
Phase_Change();
//===自助力功能设定===//
AutoHelpEN(1,0x1AA,200);
//===巡航定速功能设定===//
Keep_SpeedEN(1,0x20,6);
//===过流值上限设定===//
Current_Lim(0xB48);
//===欠压最低电压设定===//
LowVoltage_Lim(0x9B0);
//===EABS设定===//
EABS_Set(0,1);
//===硬件设定最大速度===//
Speed_LimHW(0,0,0,1);
//===软件设定最大速度===//
Speed_LimSW(0x01);
while
(1)
{
_nop_();
//此处添加自己的程序
//添加自己的程序结束
}
}
/***************************主函数结束********************************/


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 电动车 控制程序
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 保育笔记.doc
保育笔记.doc
-
北京地区成人学士学位英语统一考试真题及答案.docx
-
幼儿园外出活动安全应急预案.doc
-
形容词变副词规律.doc
-
新概念英语第一册阶段测试题(01--12).doc
-
中班幼儿发展分析报告.doc
-
新概念英语第一册Lesson1-20测试题.doc
-
幼儿园安全教育宣传稿2-3月份.doc
-
描写山水风光的古诗词.doc
-
大学英语B题库阅读四.doc
 幼儿园日常安全检查记录表.xls
幼儿园日常安全检查记录表.xls
-
汽车涂装术语中英文对照.xls
-
1993年全国高考数学试题.doc
-
-简谐运动的图像.doc
-
幼儿园教职工安全培训记录.wps
-
世界主要国家及首都对照表(中英文).doc
-
-渗透作用原理说课稿.doc
-
电大远程网络教育大学英语B统考题库真题.doc
-
2010年江苏省高考化学试卷及解析.doc
-
2012年辽宁省高考数学试卷(文科)答案与解析.doc
-
2006年全国化学竞赛初赛模拟试卷(02).doc
-
幼儿园一日常规检查记录表.xls
-
自考英语二教材课文讲义unit.docx
-
全国高等教育自学考试英语词汇学试题及答案.doc
-
18年高考真题理科数学(全国2卷).doc
-
2008高中化学竞赛初赛模拟试卷(11).doc
-
2012年6月福建省高中生物会考试题.doc
-
1989年全国高考数学文科.doc
-
1994年全国高考数学试题.doc
-
2011年浙江普通高中学业水平考试通用技术试卷及答案.doc
-
1997年全国高中学生化学竞赛(初赛)试题.doc
-
2011年辽宁省高考数学试卷(理科)答案与解析.doc
-
精选傲慢与偏见英语读书笔记.docx
-
会务个人工作总结多篇范文与会展总结汇编.docx
-
楼施工电梯基础方案.docx
-
高三化学二轮复习计划.docx
-
企事业单位档案管理基础题库一精品文档doc.docx
-
广西壮族自治区田阳高中学年高一月考生物试题.docx
-
国学社社长述职报告.docx
-
基坑边坡渗水流沙处理方案.docx
-
南开21春学期《婚姻家庭与继承法》在线作业282.docx
-
年度科室质量控制计划.docx
-
净化车间各单元事故案例汇编共46页.docx
-
农村暑期社会实践报告.docx
-
韩愈《师说》诗词鉴赏及译文.docx
-
浅谈中医医院药事管理的特色与难点.docx
-
国家统一法律职业资格考试之司法考试一及答案190.docx
-
基于云计算技术的移动通信网络优化策略.docx
-
高一学生入党申请格式最新篇.docx
-
企业商学院销售顾问签单成交销售技巧培训手册 12页.docx
-
注射模浇注系统有什么作用.doc
