 实验一 进程管理 昆工版.docx
实验一 进程管理 昆工版.docx
- 文档编号:3315139
- 上传时间:2022-11-21
- 格式:DOCX
- 页数:17
- 大小:148.60KB
实验一 进程管理 昆工版.docx
《实验一 进程管理 昆工版.docx》由会员分享,可在线阅读,更多相关《实验一 进程管理 昆工版.docx(17页珍藏版)》请在冰豆网上搜索。
实验一进程管理昆工版
昆明理工大学信息工程与自动化学院学生实验报告
(2013—2014学年第二学期)
课程名称:
操作系统开课实验室:
信自楼4442014年3月25日
年级、专业、班
计科122班
学号
201210405204
姓名
邹华宇
成绩
实验项目名称
进程管理
指导教师
杨云飞
教师评语
教师签名:
年月日
一、实验目的
通过编写进程管理的算法,要求学生掌握整个进程管理的各个环节,进程的数据结构描述,进程的各种状态之间的转换,以及进程的调度算法。
以加深对进程的概念及进程调度算法的理解,并且提高链表的应用能力,达到提高编程能力的目的。
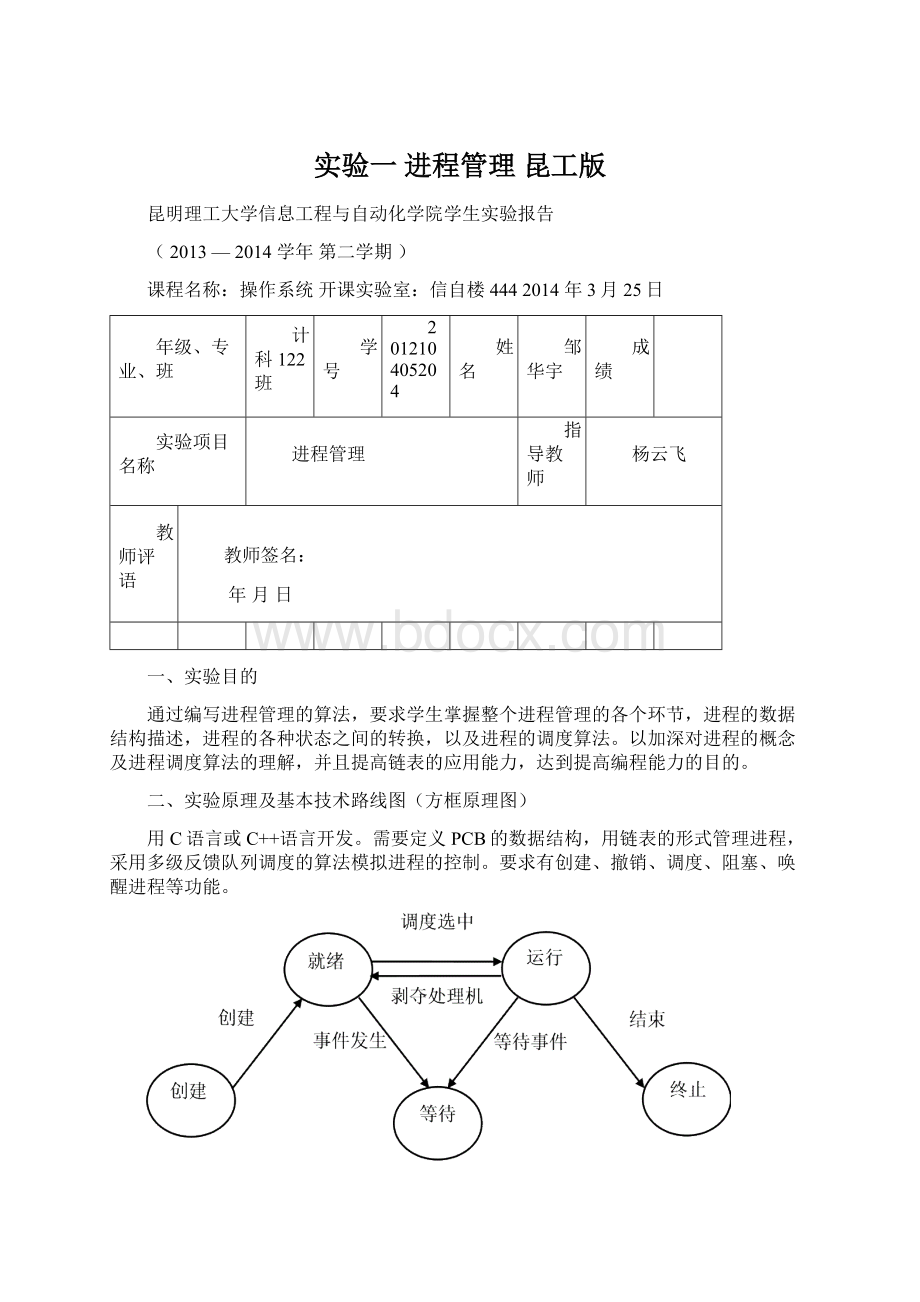
二、实验原理及基本技术路线图(方框原理图)
用C语言或C++语言开发。
需要定义PCB的数据结构,用链表的形式管理进程,采用多级反馈队列调度的算法模拟进程的控制。
要求有创建、撤销、调度、阻塞、唤醒进程等功能。
进程的状态转换图:
各原语句的功能说明:
进程创建原语:
进程创建是调用创建原语来实现。
创建原语扫描系统的PCB链表,在找到一定PCB链表之后,填入调用者提供的有关参数(这些参数包括:
进程名、进程优先级P0、进程正文段起始地址d0、资源清单R0等),最后形成代表进程的PCB结构。
进程撤销(终止):
撤消原语首先检查PCB进程链或进程家族,寻找所要撤消的进程是否存在。
如果找到了所要撤消的进程的PCB结构,则撤消原语释放该进程所占有的资源之后,把对应的PCB结构从进程链或进程家族中摘下并返回给PCB空队列。
如果被撤消的进程有自己的子进程,则撤消原语先撤消其子进程的PCB结构并释放子进程所占用的资源之后,再撤消当前进程的PCB结构和释放其资源。
阻塞原语:
当发生引起阻塞的事件时,该原语被该进程自己调用来阻塞自己。
阻塞原语在阻塞一个进程时,由于该进程正处于执行状态,故应先中断处理机和保存该进程的CPU现场。
然后将被阻塞进程置“阻塞”状态后插入等待队列中,再转进程调度程序选择新的就绪进程投入运行。
唤醒原语:
当等待队列中的进程所等待的事件发生时,等待该事件的所有进程都将被唤醒。
一个处于阻塞状态的进程不可能自己唤醒自己。
唤醒一个进程有两种方法:
一种是由系统进程唤醒。
另一种是由事件发生进程唤醒。
当由系统进程唤醒等待进程时,系统进程统一控制事件的发生并将“事件发生”这一消息通知等待进程。
从而使得该进程因等待事件已发生而进入就绪队列。
等待进程也可由事件发生进唤醒。
由事件发生进程唤醒时,事件发生进程和被唤醒进程之间是合作关系。
因此,唤醒原语既可被系统进程调用,也可被事件发生进程调用。
我们称调用唤醒原语的进程为唤醒进程。
多级反馈队列调度算法的描述:
多级队列调度算法也称多级反馈队列调度算法,它是时间片调度算法与优先数调度算法的结合。
实行这种调度算法时,系统中将维持多个就绪队列,每个就绪队列具有不同的调度级别,可以获得不同长度的时间片。
例如,系统维持N个就绪队列,第1级就绪队列中进程的调度级别最高,可获得的时间片最短,第N级就绪队列中进程的调度级别最低,可获得的时间片最长。
具体的调度方法是:
创建一个新进程时,它的PCB将进入第1级就绪队列的末尾。
对于在第1级到第N-1级队列中的进程,如果在分配给它的时间片内完成了全部工作,那么就撤离系统;如果在时间片没有用完时提出了输入/输出请求或要等待某事件发生,那么就进入相应的阻塞队列里等待。
在所等待的事件出现时,仍回到原队列末尾,参与下一轮调度(也就是每个队列实行先来先服务调度算法);如果用完了时间片还没有完成自己的工作,那么只能放弃对CPU的使用,降到低一级队列的末尾,参与那个队列的调度。
对位于最后一个队列里的进程,实行时间片轮转调度算法。
整个系统最先调度1级就绪队列;只有在上一级就绪队列为空时,才去下一级队列调度。
当比运行进程更高级别的队列中到达一个进程(可以肯定,在此之前比运行进程级别高的所有队列全为空)时,系统将立即停止当前运行进程的运行,让它回到自己队列的末尾,转去运行级别高的那个进程。
流程图:
数据结构定义:
charname[20];/*进程的名字*/
intsupernumber;/*进程的优先级*/
intround;/*分配CPU的时间片*/
intcputime;/*CPU执行时间*/
intneedtime;/*进程执行所需要的时间*/
charstate;/*进程的状态,W—就绪态,R—执行态,F—完成态*/
intcount;/*记录执行的次数*/
structnode*next;/*链表指针*/
主要变量的说明:
PCB*run=NULL,*finish=NULL;/*定义三个队列,就绪队列,执行队列和完成队列*/
ReadyQueue*Head=NULL;/*定义第一个就绪队列*/
intnum;/*进程个数*/
intReadyNum;/*就绪队列个数*/
函数的说明:
voidOutput();/*进程信息输出函数*/
voidInsertFinish(PCB*in);/*将进程插入到完成队列尾部*/
voidInsertsupernumber(ReadyQueue*in);/*创建就绪队列,规定优先数越小,优先级越低*/
voidsupernumberCreate();/*创建就绪队列输入函数*/
voidGetFirst(ReadyQueue*queue);/*取得某一个就绪队列中的队头进程*/
voidInsertLast(PCB*in,ReadyQueue*queue);/*将进程插入到就绪队列尾部*/
voidProcessCreate();/*进程创建函数*/
voidRoundRun(ReadyQueue*timechip);/*时间片轮转调度算法*/
voidMultiDispatch();/*多级调度算法,每次执行一个时间片*/
三、所用仪器、材料(设备名称、型号、规格等)。
计算机一台
四、实验方法、步骤
#include
#include
#include
#include
typedefstructnode/*进程节点信息*/
{
charname[20];/*进程的名字*/
intsupernumber;/*进程的优先级*/
intround;/*分配CPU的时间片*/
intcputime;/*CPU执行时间*/
intneedtime;/*进程执行所需要的时间*/
charstate;/*进程的状态,W——就绪态,R——执行态,F——完成态*/
intcount;/*记录执行的次数*/
structnode*next;/*链表指针*/
}PCB;
typedefstructQueue/*多级就绪队列节点信息*/
{
PCB*LinkPCB;/*就绪队列中的进程队列指针*/
intsupernumber;/*本就绪队列的优先级*/
intround;/*本就绪队列所分配的时间片*/
structQueue*next;/*指向下一个就绪队列的链表指针*/
}ReadyQueue;
PCB*run=NULL,*finish=NULL;/*定义三个队列,就绪队列,执行队列和完成队列*/
ReadyQueue*Head=NULL;/*定义第一个就绪队列*/
intnum;/*进程个数*/
intReadyNum;/*就绪队列个数*/
voidOutput();/*进程信息输出函数*/
voidInsertFinish(PCB*in);/*将进程插入到完成队列尾部*/
voidInsertsupernumber(ReadyQueue*in);/*创建就绪队列,规定优先数越小,优先级越低*/
voidsupernumberCreate();/*创建就绪队列输入函数*/
voidGetFirst(ReadyQueue*queue);/*取得某一个就绪队列中的队头进程*/
voidInsertLast(PCB*in,ReadyQueue*queue);/*将进程插入到就绪队列尾部*/
voidProcessCreate();/*进程创建函数*/
voidRoundRun(ReadyQueue*timechip);/*时间片轮转调度算法*/
voidMultiDispatch();/*多级调度算法,每次执行一个时间片*/
voidOutput()/*进程信息输出函数*/
{
ReadyQueue*print=Head;
PCB*p;
printf("进程名\t优先级\t轮数\tcpu时间\t需要时间\t进程状态\t计数器\n");
while(print)
{
if(print->LinkPCB!
=NULL)
{
p=print->LinkPCB;
while(p)
{
printf("%s\t%d\t%d\t%d\t%d\t\t%c\t\t%d\n",p->name,p->supernumber,p->round,p->cputime,p->needtime,p->state,p->count);
p=p->next;
}
}
print=print->next;
}
p=finish;
while(p!
=NULL)
{
printf("%s\t%d\t%d\t%d\t%d\t\t%c\t\t%d\n",p->name,p->supernumber,p->round,p->cputime,p->needtime,p->state,p->count);
p=p->next;
}
p=run;
while(p!
=NULL)
{
printf("%s\t%d\t%d\t%d\t%d\t\t%c\t\t%d\n",p->name,p->supernumber,p->round,p->cputime,p->needtime,p->state,p->count);
p=p->next;
}
}
voidInsertFinish(PCB*in)/*将进程插入到完成队列尾部*/
{
PCB*fst;
fst=finish;
if(finish==NULL)
{
in->next=finish;
finish=in;
}
else
{
while(fst->next!
=NULL)
{
fst=fst->next;
}
in->next=fst->next;
fst->next=in;
}
}
voidInsertsupernumber(ReadyQueue*in)/*创建就绪队列,规定优先数越小,优先级越低*/
{
ReadyQueue*fst,*nxt;
fst=nxt=Head;
if(Head==NULL)/*如果没有队列,则为第一个元素*/
{
in->next=Head;
Head=in;
}
else/*查到合适的位置进行插入*/
{
if(in->supernumber>=fst->supernumber)/*比第一个还要大,则插入到队头*/
{
in->next=Head;
Head=in;
}
else
{
while(fst->next!
=NULL)/*移动指针查找第一个别它小的元素的位置进行插入*/
{
nxt=fst;
fst=fst->next;
}
if(fst->next==NULL)/*已经搜索到队尾,则其优先级数最小,将其插入到队尾即可*/
{
in->next=fst->next;
fst->next=in;
}
else/*插入到队列中*/
{
nxt=in;
in->next=fst;
}
}
}
}
voidsupernumberCreate()/*创建就绪队列输入函数*/
{
ReadyQueue*tmp;
inti;
staticintj=0;
printf("输入就绪队列的个数:
\n");
scanf("%d",&ReadyNum);
printf("每个就绪队列的CPU时间片:
(优先级和时间片成反比)\n");
for(i=0;i { if((tmp=(ReadyQueue*)malloc(sizeof(ReadyQueue)))==NULL) { perror("malloc"); exit (1); } tmp->round=int(pow(2.0,(++j)));/*输入此就绪队列中给每个进程所分配的CPU时间片*/ printf("%d\n",tmp->round); tmp->supernumber=50-tmp->round;/*设置其优先级,时间片越高,其优先级越低*/ tmp->LinkPCB=NULL;/*初始化其连接的进程队列为空*/ tmp->next=NULL; Insertsupernumber(tmp);/*按照优先级从高到低,建立多个就绪队列*/ } } voidGetFirst(ReadyQueue*queue)/*取得某一个就绪队列中的队头进程*/ { run=queue->LinkPCB; if(queue->LinkPCB! =NULL) { run->state='R'; queue->LinkPCB=queue->LinkPCB->next; run->next=NULL; } } voidProcessCreate()/*进程创建函数*/ { PCB*tmp; inti; staticintj=1; printf("输入进程的个数: \n"); scanf("%d",&num); for(i=0;i { if((tmp=(PCB*)malloc(sizeof(PCB)))==NULL) { perror("malloc"); exit (1); } printf("输入%d进程名字: \n",j); scanf("%s",tmp->name); getchar(); printf("输入%d进程时间: \n",j++);/*吸收回车符号*/ scanf("%d",&(tmp->needtime)); tmp->cputime=0; tmp->state='W'; tmp->supernumber=50-tmp->needtime;/*设置其优先级,需要的时间越多,优先级越低*/ tmp->round=Head->round; tmp->count=0; InsertLast(tmp,Head);/*按照优先级从高到低,插入到就绪队列*/ } system("cls"); } voidInsertLast(PCB*in,ReadyQueue*queue)/*将进程插入到就绪队列尾部*/ { PCB*fst; fst=queue->LinkPCB; if(queue->LinkPCB==NULL) { in->next=queue->LinkPCB; queue->LinkPCB=in; } else { while(fst->next! =NULL) { fst=fst->next; } in->next=fst->next; fst->next=in; } } voidRoundRun(ReadyQueue*timechip)/*时间片轮转调度算法*/ { intflag=1; GetFirst(timechip); while(run! =NULL) { while(flag) { run->count++; run->cputime++; run->needtime--; if(run->needtime==0)/*进程执行完毕*/ { run->state='F'; InsertFinish(run); flag=0; } elseif(run->count==timechip->round)/*时间片用完*/ { run->state='W'; run->count=0;/*计数器清零,为下次做准备*/ InsertLast(run,timechip); flag=0; } } flag=1; GetFirst(timechip); } } voidMultiDispatch()/*多级调度算法,每次执行一个时间片*/ { intflag=1; intk=0; ReadyQueue*point; point=Head; GetFirst(point); while(run! =NULL) { Output(); if(Head->LinkPCB! =NULL) point=Head; while(flag) { run->count++; run->cputime++; run->needtime--; if(run->needtime==0)/*进程执行完毕*/ { run->state='F'; InsertFinish(run); flag=0; } elseif(run->count==run->round)/*时间片用完*/ { run->state='W'; run->count=0;/*计数器清零,为下次做准备*/ if(point->next! =NULL) { run->round=point->next->round;/*设置其时间片是下一个就绪队列的时间片*/ InsertLast(run,point->next);/*将进程插入到下一个就绪队列中*/ flag=0; } else { RoundRun(point);/*如果为最后一个就绪队列就调用时间片轮转算法*/ break; } } } flag=1; if(point->LinkPCB==NULL)/*就绪队列指针下移*/ point=point->next; if(point->next==NULL) { RoundRun(point); break; } GetFirst(point); } } intmain() { printf("\t\t\t\t进程管理\n"); supernumberCreate();/*创建就绪队列*/ ProcessCreate();/*创建就绪进程队列*/ printf("\t\t\t\t进程调度\n"); for(inti=0;i<80;i++)printf("*");printf("\n"); MultiDispatch();/*算法开始*/ Output();/*输出最终的调度序列*/ return0; } 五、实验过程原始记录(数据、图表、计算等) 六、实验结果、分析和结论(误差分析与数据处理、成果总结等。 其中,绘制曲线图时必须用计算纸) 操作系统是现代计算机系统工作的基石,而且进行程序离不开操作系统的支持。 本程序完成后对于进程管理有了整体的定义和理解。 进程: 可并发执行的程序,在某个数据集合上的一次运行过程。 而进程控制块是为使程序(含数据)能独立运行,为之配置一进程控制块,即PCB。 进程有三种基本状态为就绪态(Ready)、执行态(Running)、阻塞态(Blocked)在程序中还涉及到进程的阻塞与唤醒,系统有3个进程,执行时涉及到高低就绪态和优先数的选择。 通过这次上机实验,我们加深了对于进程管理的理解和认识,对于它的执行过程和整体的结构有了一定的了解,熟悉了进程管理中主要数据结构的设计及进程调度算法。 这次实验使我们对程序以及进程管理有了更深的认识,在不断的编程过程中,不断的发现问题并将它解决对我们有很大的提高。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 实验一 进程管理 昆工版 实验 进程 管理
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
土木工程本科毕业论文.docx
-
东大18春学期《路基路面工程》在线作业123满分答案.docx
-
九年级联考语文含答案.docx
-
春学期 最新精品 苏教版小学数学一年级下册全册教案.docx
-
完整word版人体解剖学习题脉管系统.docx
-
初中英语陕西省初中毕业学业考试英语试题 通用.docx
-
仙游县东宅中学学生综合素质评价.docx
-
高考1785黑龙江省绥化市第九中学届高三上学期第三次月考英语试题 Word版含答案.docx
-
瑞璞品牌服装线上推广方案.docx
-
整理土建建筑工程费用组成与计算.docx
-
手术室护士工作总结范文.docx
-
保利东湾房地产营销策划方案概要.docx
-
三年级庆六一活动方案.docx
-
三年级下册数学综合计算题练习.docx
-
机械设备技术交底.docx
-
最新《正义的理念》正义是一个过程而非终极结果1.docx
-
小学一年级下全册音乐教案.docx
-
三种液体自动混合的PLC控制.docx
-
北京大学社会学历年考试真题doc.docx
