 机械设计 插床凸轮机构的设计.docx
机械设计 插床凸轮机构的设计.docx
- 文档编号:4362365
- 上传时间:2022-11-30
- 格式:DOCX
- 页数:16
- 大小:329.56KB
机械设计 插床凸轮机构的设计.docx
《机械设计 插床凸轮机构的设计.docx》由会员分享,可在线阅读,更多相关《机械设计 插床凸轮机构的设计.docx(16页珍藏版)》请在冰豆网上搜索。
机械设计插床凸轮机构的设计
机械原理课程设计任务书(九)
姓名张晓光专业液压传动与控制班级液压09-1班学号0907240127
一、设计题目:
插床凸轮机构的设计
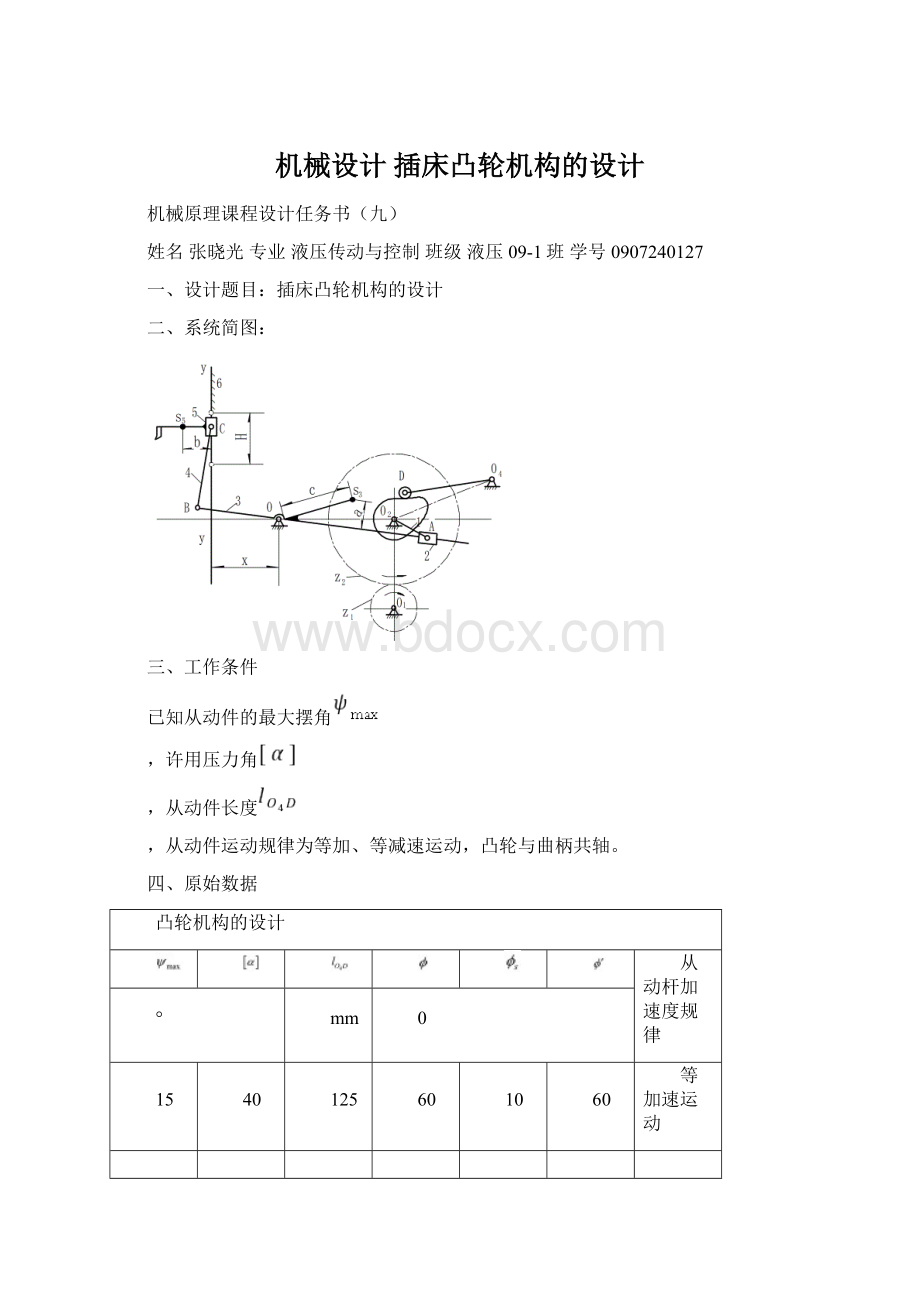
二、系统简图:
三、工作条件
已知从动件的最大摆角
,许用压力角
,从动件长度
,从动件运动规律为等加、等减速运动,凸轮与曲柄共轴。
四、原始数据
凸轮机构的设计
从动杆加速度规律
°
mm
0
15
40
125
60
10
60
等加速运动
五、要求:
1)按许用压力角
确定凸轮机构的基本尺寸。
2)求出理论廓线外凸曲线的最小曲率半径
。
3)选取滚子半径
绘制凸轮实际廓线。
4)编写说明书。
指导教师:
郝志勇席本强
开始日期:
2011年6月26日完成日期:
2011年6月30日
1.设计任务及要求
2.数学模型的建立
3.程序框图
4.程序清单及运行结果
5.设计总结
6.参考文献
7.中期检查报告
1、设计任务及要求
凸轮机构的设计
已知:
从动件的最大摆角
,许用压力角
,从动件的长度lo4d从动件的运动规律为等加,等减速运动,凸轮与曲柄共轴。
数据如下:
要求:
1)按许用压力角
确定凸轮的基圆半径r0;
2)求出理论轮廓线外凸的最小曲率半径
3)选取滚子半径r
绘制凸轮实际轮廓线,并动态显示机构;
4)用计算机打印出说明书
2、机构的数学模型
如图选取xOy坐标系,B1点为凸轮轮廓线起始点。
开始时推杆轮子中心处于B1点处,当凸轮转过角度时,摆动推杆角位移为,由反转法作图可看出,此时滚子中心应处于B2点,其直角坐标为:
因为实际轮廓线与理论轮廓线为等距离,即法向距离处处相等,都为滚半径
rT.故将理论廓线上的点沿其法向向内测移动距离rT即得实际廓线上的点B(x1,y1).由高等数学知,理论廓线B点处法线nn的斜率应为
根据上式有:
可得
实际轮廓线上对应的点B(x,y)的坐标为
此即为凸轮工作的实际廓线方程,式中“-”用于内等距线,“+”用于二、根据运动分析写出与运动方程式
1.设从动件起始角
2.1)
升程加速区,其运动方程为:
2)
属于升程减速区,其运动方程为:
3)
,属于远休止区,其运动方程为:
4)
属于回程加速区,其运动方程为:
5)
,属于回程减速区,其运动方程为:
6)
,于近休止区,其运动方程为
外等距线。
3、程序框图
4、程序清单及运行结果
#include
#include
#include
#include
#include
#defineI125.0
#defineAa40
#definerb50
#definerr5
#defineK(3.1415926/180)
#definedt0.25
floatQmax,Q1,Q2,Q3;
floatQ_a;doubleL,pr;
floate[1500],f[1500],g[1500];
voidCal(floatQ,doubleQ_Q[3])
{
Qmax=15,Q1=60,Q2=10,Q3=60;
if(Q>=0&&Q<=Q1/2)
{
Q_Q[0]=K*(2*Qmax*Q*Q/(Q1*Q1));
Q_Q[1]=4*Qmax*Q/(Q1*Q1);
Q_Q[2]=4*Qmax/(Q1*Q1);}
if(Q>Q1/2&&Q<=Q1)
{
Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1)*(Q-Q1)/(Q1*Q1));
Q_Q[1]=4*Qmax*(Q1-Q)/(Q1*Q1);
Q_Q[2]=-4*Qmax/(Q1*Q1);
}
if(Q>=Q1&&Q<=Q1+Q2)
{
Q_Q[0]=K*Qmax;
Q_Q[1]=0;
Q_Q[2]=0;
}
if(Q>Q1+Q2&&Q<=Q1+Q2+Q3/2)
{
Q_Q[0]=K*(Qmax-2*Qmax*(Q-Q1-Q2)*(Q-Q1-Q2)/(Q3*Q3));
Q_Q[1]=-4*Qmax*(Q-Q1-Q2)/(Q3*Q3);
Q_Q[2]=-4*Qmax/(Q3*Q3);
}
if(Q>Q1+Q2+Q3/2&&Q { Q_Q[0]=K*(2*Qmax*(Q3-Q+Q1+Q2)*(Q3-Q+Q1+Q2)/(Q3*Q3)); Q_Q[1]=-4*Qmax*(Q3-Q+Q1+Q2)/(Q3*Q3); Q_Q[2]=4*Qmax/(Q3*Q3); } if(Q>Q1+Q1+Q3&&Q<=360) { Q_Q[0]=K*0;Q_Q[1]=0;Q_Q[2]=0; } } voidDraw(floatQ_m) { floattt,x,y,x1,y1,x2,y2,x3,x4,y3,y4,dx,dy; doubleQQ[3]; circle(240,240,5); circle(240+L*sin(60*K),240-L*cos(60*K),5); moveto(240,240); lineto(240+20*cos(240*K),240-20*sin(240*K)); lineto(260+20*cos(240*K),240-20*sin(240*K)); lineto(240,240); moveto(240+L*sin(60*K),240-L* cos(60*K)); lineto(240+L*sin(60*K)+20*cos(240*K),240-L*cos(60*K)-20*sin(240*K)); lineto(240+L*sin(60*K)+20*cos(60*K),240-L*cos(60*K)-20*sin(240*K)); lineto(240+L*sin(60*K),240-L*cos(60*K)); for(tt=0;tt<=720;tt=tt+2){Cal(tt,QQ);/*tulunlunkuoxian*/ x1=L*cos(tt*K-30*K)-I*cos(Q_a+QQ[0]+tt*K-30*K);y1=I*sin(Q_a+QQ[0]+tt*K- 30*K)-L*sin(tt*K-30*K); x2=x1*cos(Q_m*K)-y1*sin(Q_m*K); y2=x1*sin(Q_m*K)+y1*cos(Q_m*K); putpixel(x2+240,240-y2,2); dx=(QQ[1]+1)*I*sin(Q_a+QQ[0]+tt*K-30*K)-L*sin(tt*K-30*K); dy=(QQ[1]+1)*I*cos(Q_a+QQ[0]+tt*K-30*K)-L*cos(tt*K-30*K); x3=x1+rr*dy/sqrt(dx*dx+dy*dy); y3=y1-rr*dx/sqrt(dx*dx+dy*dy); x4=x3*cos(Q_m*K)-y3*sin(Q_m*K); y4=x3*sin(Q_m*K)+y3*cos(Q_m*K); putpixel(x4+240,240-y4,YELLOW); } } voidCurvel() { intt; floaty1,y2,y3,a=0; for(t=0;t<=360/dt;t++) { delay(300); a=t*dt; if(a>=0&&a<=Q1/2) { y1=(2*Qmax*pow(a,2)/pow(Q1,2))*10; y2=(4*Qmax*(dt*K)*a/pow(Q1,2))*pow(10,4.8); y3=(4*Qmax*pow((dt*K),2)/pow(Q1,2))*pow(10,8.5); putpixel(100+a,300-y1,1); putpixel(100+a,300-y2,2); putpixel(100+a,300-y3,4); line(100+Q1/2,300-y3,100+Q1/2,300);} if((a>Q1/2)&&(a<=Q1)) { y1=(Qmax-2*Qmax*pow((Q1-a),2)/pow(Q1,2))*10; y2=(4*Qmax*(dt*K)*(Q1-a)/pow(Q1,2))*pow(10,4.8); y3=((-4)*Qmax*pow((dt*K),2)/pow(Q1,2))*pow(10,8.5); putpixel(100+a,300-y1,1); putpixel(100+a,300-y2,2); putpixel(100+a,300-y3,4); line(100+Q1,300-y3,100+Q1,300); line(100+Q1/2,300,100+Q1/2,300-y3); } if((a>Q1)&&(a<=Q1+Q2)) { y1=Qmax*10; y2=0; y3=0; putpixel(100+a,300-y1,1); putpixel(100+a,300-y2,2); putpixel(100+a,300-y3,4); line((100+Q1+Q2),300,(100+Q1+Q2),300-y3);} if((a>Q1+Q2)&&(a<=Q1+Q2+Q3/2)) { y1=(Qmax-2*Qmax*pow((a-Q1-Q2),2)/pow(Q3,2))*10; y2=(-4*Qmax*(dt*K)*(a-Q1-Q2)/pow(Q3,2))*pow(10,4.8); y3=(-4*Qmax*pow((dt*K),2)/pow(Q3,2))*pow(10,8.5); putpixel(100+a,300-y1,1); putpixel(100+a,300-y2,2); putpixel(100+a,300-y3,4); line((100+Q1+Q2+Q3/2),300,(100+Q1+Q2+Q3/2),300-y3); line((100+Q1+Q2),300,100+Q1+Q2,300-y3); } if((a>Q1+Q2+Q3/2)&&(a<=Q1+Q2+Q3)) { y1=(2*Qmax*pow((Q3+Q2+Q1-a),2)/pow(Q3,2))*10; y2=(-4*Qmax*(dt*K)*(Q3+Q2+Q1-a)/pow(Q3,2))*pow(10,4.8); y3=(4*Qmax*pow((dt*K),2)/pow(Q3,2))*pow(10,8.5); putpixel(100+a,300-y1,1); putpixel(100+a,300-y2,2); putpixel(100+a,300-y3,4); line((100+Q1+Q2+Q3),300-y3,(100+Q1+Q2+Q3),300); line((100+Q1+Q2+Q3/2),300,(100+Q1+Q2+Q3/2),300-y3); } if((a>Q1+Q2+Q3)&&(a<=360)) { y1=0; y2=0; y3=0; putpixel(100+a,300,1); putpixel(100+a,300,2); putpixel(100+a,300,4); } e[t]=y1; f[t]=y2; g[t]=y3; } } main() { intgd=DETECT,gm; inti,t,choice,x_I,y_I,flag=1; doubleQQ1[3],aa; initgraph(&gd,&gm,""); cleardevice(); for(t=0;! kbhit();t++) { for(;t<360;) t-=360; if(flag==1) for(L=I-rb+70;L { Q_a=acos((L*L+I*I-rb*rb)/(2.0*L*I)); Cal(t,QQ1); aa=atan(1*(1-QQ1[1]-L*cos(Q_a-QQ1[0]))/(L*sin(Q_a+QQ1[0]))); pr=(pow((L*L+I*I*(1+QQ1[1])*(1+QQ1[1])-2.0*L*I*(1+QQ1[1]*cos(Q_a+QQ1[0]))),3.0/2)) /((1+QQ1[1])*(2+QQ1[1])*L*I*cos(Q_a+QQ1[0])+QQ1[2]*L*I*sin(Q_a+QQ1[0])-L*L-I*I*pow(1+QQ1[1],3)); if(aa<=Aa&&pr>rr) flag=0; break; } if(flag==0) Cal(t,QQ1); Draw(t); cleardevice(); x_I=240+L*sin(60*K)-I*cos(Q_a+QQ1[0]-30*K); y_I=240-L*cos(60*K)-I*sin(Q_a+QQ1[0]-30*K); circle(x_I,y_I,rr); line(240+L*sin(60*K),240-L*cos(60*K),x_I,y_I); delay (1);} getch(); cleardevice(); line(100,80,100,445); line(70,300,530,300); line(100,80,98,90); line(100,80,102,90); line(520,298,530,300); line(520,302,530,300); setcolor (2); outtextxy(300,150,""); printf("\n\n\n\n\n\Q(w,t)");printf("\n\n\n\n\n\n\n\n\n\n\n\n\n\n\t\t\t\t\t\t\t\tt"); Curvel(); getch(); printf("\n\n\n\n\n\n\n\n\n\n"); for(i=0;i<=1440;i=i+20) { delay(1000); { printf("%d%f%f%f\n",i/4,e[i],f[i],g[i]); } getch(); } closegraph();} 5、设计总结: 为期一周的课程设计就这样结束了,在这一周里我觉得自己学会了很多东西。 虽然这几天遇到了很多困难,但是在完成了课程设计之后心里特别的激动。 这是一次深入的综合性的总复习,也是一次理论联系实际的训练,我希望能通过这次课程为将来工作奠定一些基础,并从中锻炼自己,为自己以后的生活打下一个良好的基础。 但这次课程设计的确有些力不从心的地方,刚开始的时候心里特别紧张总觉得这么做不行,那么弄也不合适。 心里有种恐惧感,后来随着困难的慢慢解决,这种心态才一点点消失。 虽然在这次设计中自己有所收获,但同时也存在一定的不足和缺陷,我想这正是本次设计的价值所在。 所以,在以后的学习和生活中,无论怎样首先都不能气馁,要对自己有信心,遇事沉着冷静,什么事情都是可以解决的! 6、参考文献 1、机械原理课程设计指导书徐翠萍冷兴聚 2、机械原理(第七版)孙恒陈作模葛文杰 3、c程序设计谭浩强


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械设计 插床凸轮机构的设计 插床 凸轮 机构 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 如何打造酒店企业文化2刘田江doc.docx
如何打造酒店企业文化2刘田江doc.docx
-
律师提供著作权法律服务业务操作指引.docx
-
18秋福建师范大学《经济法》在线作业一.docx
-
施工现场危险源.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
精校版重庆市 初中毕业水平暨高中招生考试中考英语试题AB卷Word版含答案解析.docx
-
新视野大学英语视听说教程第二版第一册完整答案.docx
-
江苏省刘国钧中学1112学年高二语文上学期期末考前辅导试题卷苏教版会员独享.docx
-
山东省潍坊市昌乐县学年七年级地理下学期期中学业质量评估试题.docx
-
西安交通大学18年课程考试《管理会计》作业考核试题.docx
-
施工安全保证体系.docx
-
南开17秋学期《科学启蒙尔雅》在线作业2.docx
-
秋福师《大学英语1》在线作业二.docx
-
231695 北交《运输物流管理》在线作业2 15秋答案.docx
-
梁原学区安全管理工作实施方案.docx
-
环保管理台帐明细.docx
-
我国三大翻译证书考试概览.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
静态分析指标.docx
-
山东金瀚控股金瀚置业绩效考核指标库.docx
-
B0301A国际贸易.docx
-
人教版八年级数学上册同步练习试题及答案第11章《三角形》 同步练习及答案111.docx
-
秋福师《概率论》在线作业二.docx
-
17秋福师《高级英语阅读二》在线作业一.docx
-
西南大学17秋0764《工程建设监理》在线作业参考资料.docx
-
生活宝典之社会大转盘一.docx
-
专卖店管理.docx
-
100个CFO的八年之资金管理篇.docx
-
东北师范古代汉语三16秋在线作业2.docx
-
专业技术人员公共危机管理考试.docx
-
东大17秋学期《大学英语二》在线作业31.docx
-
统编语文一二年级下册课后习题参考答案Word文档下载推荐.docx
-
临沂市高二上学期期末物理试题含答案已校对Word文档下载推荐.docx
-
文化故事Word文档格式.docx
-
优质水稻原原种扩繁基地建设项目可行性研究报告Word文档下载推荐.docx
-
员工成就自我智慧又名一伙人智慧Word格式.docx
-
浙江省大学生创业现状及解决对策研究Word下载.docx
-
煤矿企业 内部 市场化 管理Word文档格式.docx
-
精撰有机蓝莓系列保健产品市场营销推广策略企划案Word格式文档下载.docx
-
两种不同牵张幅度DJ跳法的弹性能能力之比较Word文件下载.docx
-
照片尺寸标准Word文件下载.docx
-
五年级上册作文教案Word格式文档下载.docx
-
最新谈论对离婚法律制度的思考与建议 精品Word下载.docx
-
庄延君词汇基础讲义Word文件下载.docx
-
四年级传统文化上教案Word文件下载.docx
-
经济文档格式.docx
-
学年河南省平顶山市高二上学期期末调研考试语文试题 解析版文档格式.docx
-
中国传统企业ERP败局的启示Word文件下载.docx
-
五年级上册第16课珍珠鸟同步讲练测人教新课标版附答案Word文档格式.docx
-
中考英语英语 任务型阅读理解专题练习及答案100文档格式.docx
