 学年机电一体化系统设计自考历学年真题和答案.docx
学年机电一体化系统设计自考历学年真题和答案.docx
- 文档编号:9082542
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:61
- 大小:714.94KB
学年机电一体化系统设计自考历学年真题和答案.docx
《学年机电一体化系统设计自考历学年真题和答案.docx》由会员分享,可在线阅读,更多相关《学年机电一体化系统设计自考历学年真题和答案.docx(61页珍藏版)》请在冰豆网上搜索。
学年机电一体化系统设计自考历学年真题和答案
22.考虑r平而上的直线运动路径,源点坐标为(0,0).終点坐标为(16,8).采用三次多项式样条函数点位控制指令完成上述运动°如果要求完成协调运动的最氏时间为4,则各轴的速度容许值的最小值和加速度容许值的战小值各为多少?
五、综合应用题(本大题共2小题,每小题10分,共20分)
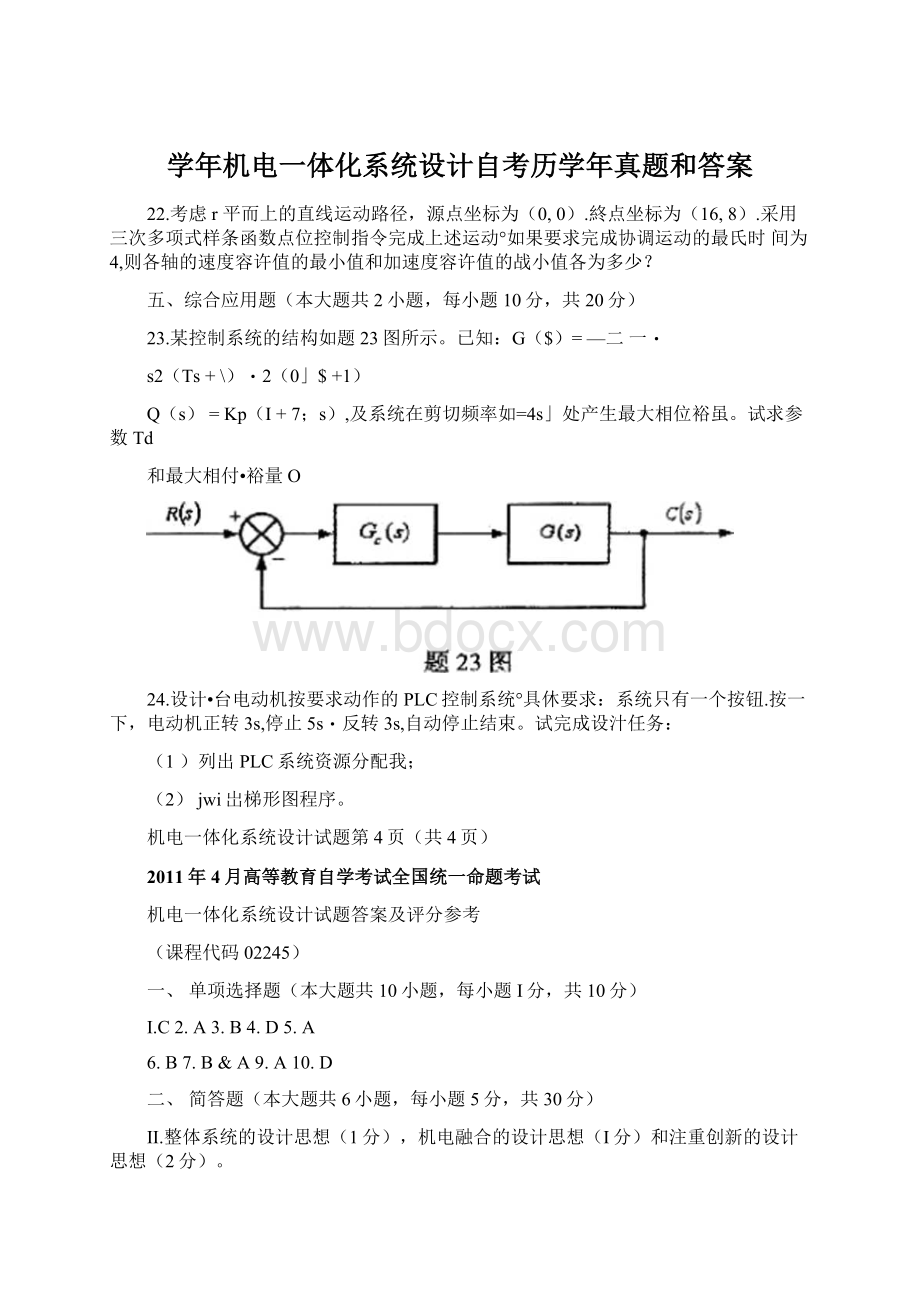
23.某控制系统的结构如题23图所示。
已知:
G($)=—二一・
s2(Ts+\)・2(0」$+1)
Q(s)=Kp(I+7;s),及系统在剪切频率如=4s」处产生最大相位裕虽。
试求参数Td
和最大相付•裕量O
24.设计•台电动机按要求动作的PLC控制系统°具休要求:
系统只有一个按钮.按一下,电动机正转3s,停止5s・反转3s,自动停止结束。
试完成设汁任务:
(1)列出PLC系统资源分配我;
(2)jwi岀梯形图程序。
机电一体化系统设计试题第4页(共4页)
2011年4月高等教育自学考试全国统一命题考试
机电一体化系统设计试题答案及评分参考
(课程代码02245)
一、单项选择题(本大题共10小题,每小题I分,共10分)
I.C2.A3.B4.D5.A
6.B7.B&A9.A10.D
二、简答题(本大题共6小题,每小题5分,共30分)
II.整体系统的设计思想(1分),机电融合的设计思想(I分)和注重创新的设计思想(2分)。
12.功能:
采集有关系统状态和行为的信息。
(2分)
组成;由传感器、调理电路、变换电路等组成。
(?
分)
13.消除齿轮副传动间隙有刚性调整法和柔性调整法°(2分)
刚性凋整法包括调整中心矩法、选择装配法、带锭度齿轮法以及斜齿轮法。
(1分)柔性卿整法主要通过在双齿轮中间加入弹性元件,使双齿轮分别贴紧其啮合齿轮齿的两侧.以消除啮合间隙。
如拉簧消除间隙结构、压簧消除间隙结构。
(1分)
14.所谓DDA法:
(1)采用数字虽(整数)表示逢度、加速度及位置坐标、(I分)
(2)将加速度到速度.速度到位置的积分表达式,采用求和的方法进行近似数值积分。
(2分)
(3)产生增量式的运动控制指令。
(1分)
(4)驱动步进电动机实现要求的运动。
(1分)
15.反应式步进电动机,结构简单.步更角较小(0.36。
〜7.5。
),启动和运行頻率较髙,
但消耗功率较大,断电时无定位转矩°(3分)
永磁式步进电动机,断电时有定位转矩,消耗功率较小,但步距角较大(7.5。
~18。
),起动和运行频率较低.并盖耍iE负脉沖供电°(2分)
16.由控制器(I分)、受控对象(1分)、反馈测星装置(2分)以及比较器(】分)等组成“
三、计算题(本大题共4小题,每小题5分,共20分)
□4=警%土誓%(2分)
=200-202xI500+202x1()(
200200
=-15+10-4.907min)
注:
因为二者转速的方向相同.所以取吟”
机电一体化系统设计试题答案及评分参考第I页(共4页)
2007年4月自考全国机电一体化系统设计试题
课程代码:
2245
多选或
】
一、单项选择题(本大题共14小题,每小题1分,共14分)
在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。
错选、
未选均无分。
1.受控变量是机械运动,如位置、速度及加速度的一种反馈控制系统称为
A.数控机床B.伺服系统
C.自动导引车D.顺序控制系统
2.若两平面之问的油液成楔形,二者相对运动时将产生压力,从而可以承载。
利用这一原理设计出各种形式的滑动摩擦支承轴系为【】
A.液体静压支承B.气体静压支承
C.气体动压支承D.液体动压支承
3.对于减速传动系统,若最后一级的间隙对系统精度影响最大,则传动比【】
二、名词解释题(本大题共5小题,每小题3分共15分)
15.线性系统、定常系统
16.齿轮系传动的最佳速比
17.直流伺服电动机的机械特性
18.直流电动机线性驱动电路
19.反应式步进动机
三、问答题(本大题共4小题,每小题4分,共16分)
20.简述典型机电一体化系统中的微处理机模块
21.
题21图为步进电动机单极性驱动电路。
试简述图中VT、R、VD、和Rf的作用
22.在机电一体化系统设计中,“路径”和“轨迹”这两个概念之间有什么区别?
23.简述时间/事件驱动顺序控制系统的类型。
四、计算题(本大题共3小题,每小题5分,共15分)
26-某五相步进电动机转子有48个齿,试计算:
(】)采用单五拍运行时的步距角ob1;
(2)采用二相三相运行时的步距角亦;
(3)当控制脉冲频率f=1600Hz时,求采用二相一三相运行时的转速%
五、简单应用题(本大题共4小题,每小题6分,共24分)
27.一台直流测速发电机具有下列性能指标:
R=0.02m,B=0.4Wb/m2,N=80,L=0.24mo试决定心并对T0~5000r/min速度范围构造标定曲线。
2&宜流电动机的额定数据:
U.=200V;nc=3000r/mino
由题28图所示电压波形的PWM放大器供电。
(1)试求电动机的转逮n;
(2)画出n=0的电压波形并标明坐标值。
29.题29图为某数控机床位置随动系统的结构图,试求:
(1)系统的自然频率叫及阻尼比
■
(2)系统对单位阶跃响应的最大超调址<7%及调整时间t■(取d=±5%);
(3)系统的静态误差系数Kp、K“
30.生成下列等加速度分布指令信号:
假设步进电动机步进角为8°,由零初始速度加速0.Is达到100r/min,然后恒速度100r/min维持3s。
绘后0・Is到停止位匿,减速度与初始速度相等,时钟信号频率为1000Hz,寄存器字长为16位带符号小数,希望在产生该速度分布时只改变加速度寄存器A的内容;求A寄存器中设置的希望值及每一段由设置信号引起的加法次数。
六、综合应用题(本大题共2小题•每小题8分■共16分)
31.
某伺服控制系统结构图如题31图所示,
其中Gc(s)=Kp(l+J-),Gp(s)=
(1)确定Kp和〒的值,使系统的剪切频率 (2)此时最大相位裕g (3)系统存单付抛物线(恒加球度)函数作 用下的稳态误差e 32.由PLC实现二台电动机Ml与M2的控制,编写梯形逻辑图程序,写出对应的助记符指令程序。 电动机Ml的起动按钮: X1;停止按钮: X2;输出控制: Y1 电动机M2的起动按钮: X3;停止按钮: X4;输出控制: "2 所有按钮都采用动合触点。 控制要求: * (1)M1运行8秒后,M2才能起动; (2)只要M2运行,Ml则不能停止。 2007年4月自考机电一体化系统设计参考答案 2007年4月高等教育自学考试全国统一命题考试 机电一体化系统设计试题答案及评分参考 (课程代码2245) 单项选择题{本大题共14小题,毎小题1分,共14分) 1.B 丸D 3.C 4.C 5.A 6.D 7,A g.D 9.C 10.C II,A 12.B 11A 14.D 2.名词解释题(本大题共5小题,每小题3分■共15分) 15.输人和输出满足线性叠加原理的系统称为线性系统。 数学模型中的所有系数都为常虽的系统称为定常系统。 临对于多级减連装瓯可梗相邻各级速比满足条件込二号如呆所有负载折合到电动机轴上的转动惯量与电动机转子转动惯量相等•则速比达到最佳9 17.直流伺服电动机的机械特性是指保持控制电压恒定时.电动机转矩与转速的关系曲线。 怡・线性功率放大器(驱动电路)是指功率元件工作于线性状态,其输出电压或电流与控制信号成比例关系。 反应式步进电动机又称变磁阴式步进电动机。 定子上有若干对磁扱’磁极上有控制绕组。 转子圆柱面上有均匀分布的小齿。 三、问答题(本大超共4小题•每小题4分■共M分) 20.答: 微处理机模块负责处理由側鱼模块和接口模块提拱的信息。 (2分) 输人参数: 被测量的反馈鈕和与系统运行有关的设定参数°(t分) 输岀: 一部分决定軀动模块的工作状态;另一部分供接口模块。 (1分) yjrX/XI/分分舟分分分分 21+答: VT: 晶体借开关元件,控制绕组电流通断。 (I K: 减小绕组的电气时间常数。 (1 讥): 续流,泄放绕组中猪存前磁能。 (1 Rf: 加快磁能泄放。 (1 22.答: 路轻只代表与轨迹有关的位置信息°(2 林—痢険(1 是具有适当速度和(或)加速度信息的路径。 (] 2工答: 根据开关条件是时间函数或事件函数,顺序控制系统分为时间驱动和事件驱动两 种类塑。 一(2分) 在时间驱动顺序控制系统中,每一操作步骤都是在给定时刻,或给定时间间隔之后启停。 (1分) 在事件驱动过程中,每一个操柞歩骤都是由于某一骊件发生才启停。 (1分) 机电一体化系统设计试题答案及评分参考第I页(共5萸〉 四、计算题(本大题共3小题,每小题5分,共15分)解: ⑴&心苏胡 =O.75°x|2x^«O.Ol(mm) (2)VygxP =1000x10 =10000(min/min) =10(m/min)解: (】”=罟a=—km 0.24x300"/”2、 d=±"0.016=±45(^s)(或=±4500cm/s2) 24. 25. =136.93(rad/s) 26. 360° 解: (】)单五拍时步距角: 鬲二元诂》・5。 360° (2)二相一三相运行时二兀孟迈=°75。 /c、耳60f60X1600rrv\//・、 ⑶转速: 2办乔立=一^5~曲00(皿山) 五■筍单应用题(本大题共4小题,毎小题6分,共24分) —厶”八、“2”RBNL2irx0.02x0.4x80xO.24 27-解: ⑴心=—60~=60 =0.016[V/(r・min")] n(r/min) 1000 2000 3000 4000 5000 E(V) 16 32 48 64 80 (2)E-KR-n; 说明: ①据式 (2),每一个转速n,对应一个E值,得到一个标定点; ②将若干点连成线即为标定曲线。 (3分) (2分) (2分) (1分) (1分) (1分) (1分) (2分) (2分) (3分) (3分) 机电一体化系统设计试题答案及评分参考第2页(共5页) E(V)A (2分) (1分) 28.解: (1)由题2X图口J知: 平均电压=ioov电动机转速: n=l500(r/min) (2)n=0的电压波形为 (1分) (I分) (1分) (1分) 注: 波形2分,坐标1分。 O32 29.解: 闭环传递函数 (1)自然频率叫y) 2処=1.^=2;r=y«0.«67 -/l-0.1671 (2)(7%=100e%=100e%=59% 33一、 1>=^=67167? 3=6(8) 机电一体化系统设计试题答案及评分参考第3页(共5页) (3)开环传递函数C(s)为【型系统 Kj9 30.解: 第一段0WiWO.ls "器氓x右X(為宀3.3333x2(脉冲/加2)采用16位带符号小数表示寄存辱A中的值,由于a,=3.3333x10'3=109.2266667x2-,5(脉冲/加')截断取整后,A】=109x2'*5=0.000000001101101/脉冲/加°)0.Is时间间隔内,加法次数为凡=0.1X1000=100(加)100次加法后,实际达到的速度为: V,=N1A1=10900x2_,5(脉冲/加)-0.3326416(脉冲/加) =19958.496(脉冲/min)第二段0.1Wtw3.Is A2=0川2=3x1000=3000(加) 第三段3・lwtw3.2s A3=-A,=-109x2-u(脉冲/加JN3=Nj=100(•加)这样所有三段A值及加法运算次数N分别为: A,=109x2'l5,A2=0,A3=-109x2“$,Ni=100,N2=3000,N3=六、综合应用题(本大题共2小题,每小题8分,共16分) 31.解: 开环传递函数G(s)=Gc(s)Gp(s)=卷空*y (1)相位裕址最大时,剪切频率3严吝=5,则t=0.8(s) 则Kp=2・5 (2)最大相位裕量叶-『(Tg 二览,(0・8x5)■堆・'(0・05x5) (3)校正后为II型系统 机电一体化系统设计试题答案及评分参考第4页(共5页) 32.解: (2分) (2分) (1分〉 S1K XI OR Yl STR NOT X2 OR ■ Y2 AND STR OUT Yl STR Yl STR Yl TMR 01 PL— 30480 OUT Y3 STR X3 OR Y2 AND NOT X4 AND Y3 OUT Y2(3分) 机电一体化系统设计试题答案及评分参考第5页(共5页) 得分 评卷人 复查人 总分 题号 一 二 三 四 五 核分人 题分 14 10 16 20 16 复查人 得分 2006年4月自学测试全国机电一体化测试试卷(课程代码2245) 本试卷共11页,满分100分,测试时间150分钟。 、单项选择题(本大题共14小题,每小题1分,共14分)在每小题列 出的四个备选项中只有一个是符合题目要求的, 请将其代码填写在题后 的括号内。 错选、多选或未选均无分。 1.有伺服放打器、执行机构、传动装置等组成的模块称 A.机械结构模块 .测量模块 C.驱动模块 .接口模块 2.使滚珠丝杠具有最大刚度的支承方式是 A.双推-双推 .双推-简支 C.单推-单推 .双推-自由 3.机械传动装置在机电一体化系统中是必不可少的, 因为在电动机和负载之间经常需要 4. 5. 6. A.匹配转矩和转速 C.缩小传动功率 .增加传动功率 .维持转速恒定 用户可通过哪种方法来调节仪表放大器之增益? A.内部电阻 C.输入电压 于旋转变压器输出电压大小有关的因素是 A.转子位置 C.转子直径 为提高感应同步器鉴相法工作方式的灵敏度,需要使节距 A.增大 .外部电阻 .输出电压 .转子材料 .转子长度 W的尺寸 .保持不变 C.减小 .取任意值 7.交流感应电动机,对应S=Sm时的转矩称 A.堵转转矩 B .负载转矩 C.额定转矩 D .最大转矩 8.直流电动机中,称 【】 A.电动机电磁时间常数 B .电动机机电时间常数 C.机械系统时间常数 D .电动机反电势系数 9.某三相步进电动机,转子40个齿, 欲使其步距 1.5,应采用的通电方式为【】 A.单拍制 B .双拍制 C.单双拍制 D .细分电路 10.若考虑对系统响应速度的影响,采样-数据系统中的采样周期应选为系统最小时间常数的 .2倍 .10倍 A.(O.1~1)倍 C.5倍 13.图示利用继电器触点实现的逻辑函数为 14.梯形图中二网络并联,采用的助记符指令为 .AND A.OR C.ORSTR .ANDSTR 得分 评卷人复查人 、名词解释题(本大题共5小题,每小题2分,共10分) 15.计算机集成制造系统 16.支承件的静刚度 17.测量中的量程 18.直流伺服电动机的调节特性 得分 评卷人 复查人 三、问答题(本大题共4小题,每小题4分,共16分) 20.机电一体化设计中,“替代机械系统”的设计思想是什么 21.简述步进电动机单极性驱动电路的组成及工作原理。 22.如何消除因截断误差造成的积累误差? 23.简述描写时间驱动顺序过程经常采用的方法。 得分 评卷人 复查人 四、计算题(本大题共4小题,每小题5分,共20分) 24.若根据滚珠丝杠副的结构参数查表得系数bst=3,试计算当外部轴向力 Fasp=20000N,轴向预载荷力为3000N时,该滚珠丝杠副的传动刚度是多少? 25.采用2000条刻线的增量编码器测电动机转速的方法如图所示。 已知时钟脉冲为 8MHz, 的时间里计数器共计 200000 个时 26.直流电动机T型双极开关放大器电路如题26 (1)若其基极信号ub的波形如题26(b) (2)若要求uAB、i 图所, 试在该图中画出对应的电枢电压 ,试求电动机 转速 n。 。 在lO 27.三相 (2)若单拍制的最 得分 评卷人 复查人 变磁阻式步进电动机,转子40个齿。 要求: (1)计算双拍制的步距角。 大转距为2N·m,计算单双拍制时的启动转矩。 五、简单使用题(本大题共4小题,每小题6分, 28.题28 图“四倍频细分和辨向电路”,图中DN1、DN2为反 为单稳触发器。 试分析: D2的输出脉冲。 (1)正向运动时,和或门D1、 个编码器脉冲问隔 AB的稳态波形。 共24分) AT1 AT4 (2)反向运动时,和或门D1、D2的输出脉冲。 29.某直流电机电枢电阻50,做电动机使用时电枢加 110V电压,空载电枢电流O.1A, 3000r/min。 (励 磁保持额定状态) (1)电机空载损耗功率为多少? (2)电机的反电动势系数为多少? (3)若电机做发电机用,转速保持2000r/rain,外接300负载电阻,则其电枢电流为 多少? 30.已知系统结构图如题30图所示。 12 (1)若K1=25,Kf=0,求阶跃响应的最大超调量%(定义: %=e1100%)和 调节时间ts(取△=±0.05). 2)当K1=25,欲使系统为最佳阻尼,确定Kf的值。 33.PLC控制系统的梯形图如题33图所示。 (1)写出助记符指令程序; (2)列出Y1、Y2、Y4输出变量的布尔代数方程。 2006年4月机电一体化系统设计参考答案 2006年4月高等教育自学考试全国统一命题考试 机电一体化系统设计试题答案及评分参考 (课程代码2245) 一、单项选择题(本大题共14小題,每小題1分,共14分) I.C2.A°3.A4.B5,A 6,C7.D8.B9.C10.A 1LC12.D13.A14.C 二、名词解释题(本大題共5小题,毎小题2分,共宙分) 点计算机集成制造系统是指通过计算机悔络,将计算机辅助设计、计算机辅助规划以及计算机辅助制造,统一接成一个大系统,实现全厂自动化。 16.支承件的静刚度是指支承件产生的静变形与承受的静载荷之比° n+测屋中的量程是指由可测变莹值的下限和上限定义,毘程包含下限和上限之间的所有值。 直流伺服电动机的调节特性是指电礴转矩恒定时,电动机转速随控制电压变化的关 19.全闭环伺服系统是措熔位置传感器安装在输岀轴上,直接测量工作台位移,把机械传动部件包含在闭环内形成的伺服系统* 三、间普题{本大羁共斗小题,每小题4分丫共16分} 20.檄端悄况下,机械的功能可以完全由微处理机和执行器取代,从而使机械产胡变成陋子产品(2分)。 如电子手表、自动驾驶等(2分儿 21.步进电动机单极性驱动电路中,晶体铛开关由脉冲分配器产生的脉冲控制,从而使各相绕组的电流导通和截止(2分)。 还应有阻流电阻和续流二极骨(2分)。 22.处理截断误差的一种方法(在采用桀数算法时)就是慄昭截断误差(2分),等待它们积專到匯著值时,修正整数部分,这样就可以消除税累课差(2分儿 芻+为了描写肘间驱动咂序过程、经常采用语句表和过程定时图这两种方医(2分)。 语旬表分涉骤列写顺序淀时图在同一时间抽上画出各操作的状态(2分)Q 四、计算題(本大题共4小题,每小超5分,共20分) 24.解; (1)査表得轴向位移ASipDt«ll+5xbrt 曲二34.5|^(2分) (2)传动刚度护(2分) (3)计算: =579.7(^^)(I分) 注: 从表中査得的值在(11-1? )之间均可算正确“ 机电一体化系统设计试题答案及评分参考第】页(共4页〕 25. 解: 时间测量值—豔h0.025(s)(2分)n血(2分) 26. t(2分〉 N•T 2帀帶競分)解: (1) 27. 執⑴•••0.= 360° 0(2分) (2)tT/T垃cos业m•c T=2N•inxcos 3x2 =2N・m輕=l.732N•m(3分) 五、简单应用题(本大题共4小题,每小题6分,共24分) 28.解: (1)从题28(a)波形图可以看岀,6和®为两个相泣相差90。 的光电信号。 正向运动时,5的相位超前690。 。 U,的上升沿出现在6为低电平期间,(J? 的上升沿出现在U,为高电平期间。 在匕和$变化一个周期同,与或门D.输出四个正向计数脉冲。 (4分). (2)反向运动时,匕的相位超前0,90%在U? 和®变化一•个周期内,与或门D2输出四个正向计数脉冲。 (2分) 机电一体化系统设计试题答案及评分参考第2页(共4页) 29.解: (l)空载损耗=Uftxlo=UOVxO.lA=lIW(2分) (2)・・・反电势E=110V-0.1Ax50D=105V •••反电动势系数Ke=^-=^=0.035V/r/min(2分) (3)vn=2OOOr/mint.\E=Kc-n=0.035x2000=70V T=E_7°=07a *~Rtt+RL_50+300"Q,ZA 即: 此时电枢电流0.2A(2分) 30.解: (1)闭环传函 如4孔 K(s)s(s+3+Kf)+K)s24-2^g)ds+u)B2其中u)n=丿石也=


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 学年 机电 一体化 系统 设计 自考 答案
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
最新三级医院麻醉科工作总结和工作计划.docx
-
微机原理课程设计用8255A实现4位十进制计算器.docx
-
文学系毕业生的自我鉴定完整版.docx
-
宁夏银川市届高三普通高中学科教学质量检测一模英语试题含答案.docx
-
无锡万健商业广场2215927618.docx
-
最新幼儿园设计规范标准.docx
-
物理初中竞赛.docx
-
排列组合全部20种方法.docx
-
棚舍施工方案牛棚牛舍羊棚羊舍.docx
-
西方经济学选择题.docx
-
现场处置方案好.docx
-
普心单项选择题复习题题库236道.docx
-
企业纪检书记党性分析材料党性分析doc.docx
-
项目总工程师会议汇报材料.docx
-
汽车配件管理教案三汽车配件订货管理.docx
-
小升初语文毕业考试试题A卷 附解析.docx
-
小学二年级走进秋天语文研究性学习纪实精编版.docx
-
强烈推荐东海蓝月项目施工方案.docx
-
区域责任牌.docx
 党支部书记抓基层党建工作述职报告.docx
党支部书记抓基层党建工作述职报告.docx
- 最新西师版数学四年级下册教案Word文档下载推荐.docx
- 尊敬的各位老师大家下午好今天我就小学英语中的语音Word文件下载.docx
- 最新经济法基础模拟试题与答案文档格式.docx
- 最新高一数学上学期期中检测必修1+数学试题3优秀名师资料Word格式文档下载.docx
- 装配式结构住宅楼脚手架搭设方案Word格式文档下载.docx
- 最新人教部编版小学语文四年级上册21古诗三首说课稿Word格式文档下载.docx
- 重庆市中考英语真题试题A卷含答案新文档格式.docx
- 专题71 力考点题型解密解析版Word文档格式.docx
- 总务护士工作总结范文五篇Word格式.docx