 第10讲摄像机漫游分析解析Word格式文档下载.docx
第10讲摄像机漫游分析解析Word格式文档下载.docx
- 文档编号:13490289
- 上传时间:2022-10-11
- 格式:DOCX
- 页数:13
- 大小:189.90KB
第10讲摄像机漫游分析解析Word格式文档下载.docx
《第10讲摄像机漫游分析解析Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《第10讲摄像机漫游分析解析Word格式文档下载.docx(13页珍藏版)》请在冰豆网上搜索。
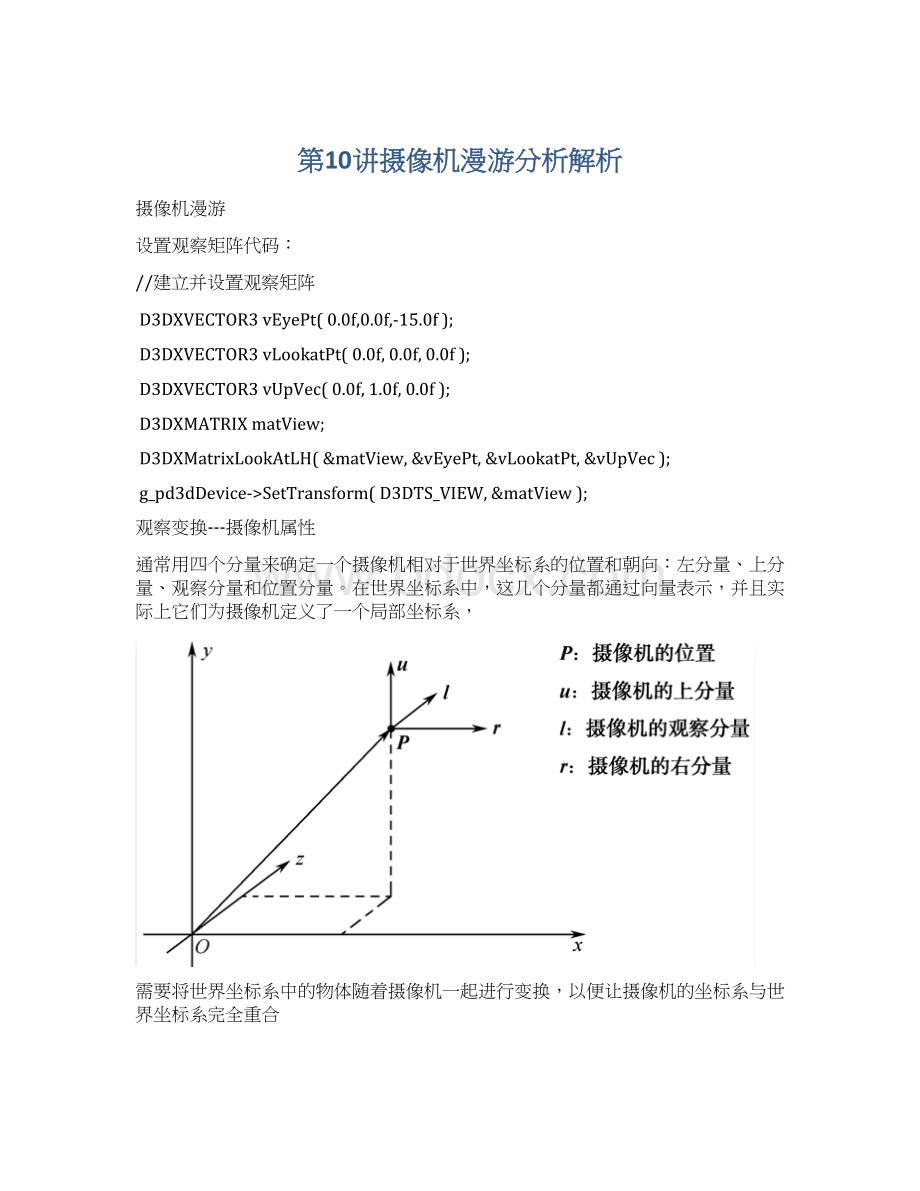
在世界坐标系中,这几个分量都通过向量表示,并且实际上它们为摄像机定义了一个局部坐标系,
需要将世界坐标系中的物体随着摄像机一起进行变换,以便让摄像机的坐标系与世界坐标系完全重合
摄像机变换
Ø
1.沿各分量平移
由于摄像机包含向右、向上、观察三个分量,因此可以控制摄像机分别沿这三个分量进行平移。
其中,沿右分量的平移称作扫视,沿上分量的平移称作升降,而沿观察分量的平移称作平动,如图所示
2.绕各分量旋转
摄像机的另一种变换是分别绕上分量、右分量和观察分量进行旋转。
其中,绕上分量的旋转称作偏航,绕右分量的旋转称作俯仰,而绕观察分量的旋转称作滚动,如图所示
3.绕观察点旋转
摄像机的平移和旋转已经能够满足简单的应用,但是有时候还需要将观察点固定,并控制摄像机围绕该点做圆周运动,以便能够从不同角度观察同一物体。
因此,还需要让摄像机绕某个点进行旋转,如图所示
以摄像机在y方向上绕点l=(lx,ly,lz)旋转为例,假设当前摄像机位于p点(观察点l与p点同在y平面内),那么当摄像机按逆时针方向旋转a角度后应该位于p’点,如图所示。
//摄像机绕Y轴旋转fAngle角度
VOIDCCamera:
:
CircleRotationY(FLOATfAngle)
{
D3DXMATRIXR;
D3DXMatrixRotationAxis(&
R,&
m_vUpVec,fAngle);
D3DXVec3TransformCoord(&
m_vRightVec,&
R);
m_vLookVec,&
floatdx=m_vPosition.x-m_vLookat.x;
floatdz=m_vPosition.z-m_vLookat.z;
m_vPosition.x=m_vLookat.x+dx*cosf(fAngle)-dz*sinf(fAngle);
m_vPosition.z=m_vLookat.z+dx*sinf(fAngle)+dz*cosf(fAngle);
ResetLookatPos(&
m_vLookat);
}
根据上面介绍的内容,可以定义一个具有九个自由度的摄像机CCamera类,其中可以沿三个分量平移、绕三个分量旋转,以及在三个坐标方向上绕观察点旋转。
4.CCamera类定义
#pragmaonce
#include<
d3d9.h>
d3dx9.h>
//--------------------------------------------------------------------------------------
//Name:
classCCamera
//Desc:
虚拟摄像机平移、旋转
classCCamera
private:
D3DXVECTOR3m_vRightVec;
//摄像机右侧向量
D3DXVECTOR3m_vUpVec;
//摄像机上方向量
D3DXVECTOR3m_vLookVec;
//摄像机视线方向
D3DXVECTOR3m_vPosition;
//摄像机当前位置
D3DXMATRIXm_matView;
//摄像机矩阵
D3DXMATRIXm_matProj;
//投影矩阵
D3DXVECTOR3m_vLookat;
//摄像机视线位置
LPDIRECT3DDEVICE9m_pd3dDevice;
public:
CCamera(IDirect3DDevice9*pd3dDevice);
virtual~CCamera(void);
VOIDGetViewMatrix(D3DXMATRIX*pMatrix);
//获取摄像机矩阵
VOIDGetProjMatrix(D3DXMATRIX*pMatrix){*pMatrix=m_matProj;
}
VOIDGetCameraPos(D3DXVECTOR3*pVector){*pVector=m_vPosition;
VOIDGetLookVector(D3DXVECTOR3*pVector){*pVector=m_vLookVec;
VOIDResetLookatPos(D3DXVECTOR3*pLookat=NULL);
//设置视线位置
VOIDResetCameraPos(D3DXVECTOR3*pVector=NULL);
//设置摄像机位置
VOIDResetViewMatrix(D3DXMATRIX*pMatrix=NULL);
//设置摄像机(观察)矩阵
VOIDResetProjMatrix(D3DXMATRIX*pMatrix=NULL);
//设置投影矩阵
//沿各分量平移
VOIDMoveAlongRightVec(FLOATfUnits);
//沿right向量移动
VOIDMoveAlongUpVec(FLOATfUnits);
//沿up向量移动
VOIDMoveAlongLookVec(FLOATfUnits);
//沿look向量移动
//绕各分量旋转
VOIDRotationRightVec(FLOATfAngle);
//绕right向量选择
VOIDRotationUpVec(FLOATfAngle);
//绕up向量旋转
VOIDRotationLookVec(FLOATfAngle);
//绕look向量旋转
//绕空间点旋转
VOIDCircleRotationX(FLOATfAngle);
//在X方向上绕观察点旋转
VOIDCircleRotationY(FLOATfAngle);
//在Y方向上绕观察点旋转
VOIDCircleRotationZ(FLOATfAngle);
//在Z方向上绕观察点旋转
};
5、摄像机类CCamera类的实现
#include"
Camera.h"
fstream>
CCamera:
CCamera(IDirect3DDevice9*pd3dDevice)
m_pd3dDevice=pd3dDevice;
m_vRightVec=D3DXVECTOR3(1.0f,0.0f,0.0f);
//默认右向量与X正半轴重合
m_vUpVec=D3DXVECTOR3(0.0f,1.0f,0.0f);
//默认上向量与Y正半轴重合
m_vLookVec=D3DXVECTOR3(0.0f,0.0f,1.0f);
//默认观察向量与Z正半轴重合
m_vPosition=D3DXVECTOR3(0.0f,0.0f,0.0f);
//默认摄像机的位置为原点
m_vLookat=D3DXVECTOR3(0.0f,0.0f,0.0f);
GetViewMatrix(&
m_matView);
//取得取景变换矩阵
D3DXMatrixPerspectiveFovLH(&
m_matProj,D3DX_PI/4.0f,1.0f,1.0f,2000.0f);
//投影变换矩阵
~CCamera(void)
GetViewMatrix(D3DXMATRIX*pMatrix)
//使各分量相互垂直
D3DXVec3Normalize(&
m_vLookVec);
D3DXVec3Cross(&
m_vUpVec,&
m_vRightVec);
//上向量与观察向量垂直
m_vUpVec);
//规格化上向量
//右向量与上向量垂直
//你能通过左手法则确定叉积返回的向量。
按照第一个向量指向第二个向量弯曲你的左手,//这时拇指所指的方向就是叉积向量所指的方向。
//规格化右向量
//创建取景变换矩阵
pMatrix->
_11=m_vRightVec.x;
//Rx
_12=m_vUpVec.x;
//Ux
_13=m_vLookVec.x;
//Lx
_14=0.0f;
_21=m_vRightVec.y;
//Ry
_22=m_vUpVec.y;
//Uy
_23=m_vLookVec.y;
//Ly
_24=0.0f;
_31=m_vRightVec.z;
//Rz
_32=m_vUpVec.z;
//Uz
_33=m_vLookVec.z;
//Lz
_34=0.0f;
_41=-D3DXVec3Dot(&
m_vPosition);
//-P*R
_42=-D3DXVec3Dot(&
//-P*U
_43=-D3DXVec3Dot(&
//-P*L
_44=1.0f;
ResetLookatPos(D3DXVECTOR3*pLookat)
if(pLookat!
=NULL)m_vLookat=(*pLookat);
elsem_vLookat=D3DXVECTOR3(0.0f,0.0f,1.0f);
m_vLookVec


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 10 摄像机 漫游 分析 解析
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 12处方点评管理规范实施细则_精品文档.doc
12处方点评管理规范实施细则_精品文档.doc
-
12核心制度竞赛题库_精品文档.doc
-
12新医疗技术准入制度_精品文档.docx
-
12月份医务科质控通报_精品文档.doc
-
12项基本公共卫生服务项目_精品文档.docx
-
12月环境卫生学监测方法考核试题_精品文档.doc
-
13双重预防体系风险评价制度及准则_精品文档.doc
-
12种不能忽视的可能的心脏病症状_精品文档.doc
-
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
12经络彩图_精品文档.doc
-
151颅脑损伤恢复期康复临床路径_精品文档.doc
-
14项护理核心制度_精品文档.doc
-
12检验科化学危险物品使用准则_精品文档.doc
-
15-消化内镜手术分级目录_精品文档.xls
-
13术前讨论记录本模板_精品文档.doc
-
17-下腰痛评估表JOAVAPS_精品文档.doc
-
12项基本公共卫生服务流程图_精品文档.doc
-
13中国髋膝关节置换的现状及展望_精品文档.docx
-
14种最迷惑人的癌症前兆_精品文档.docx
-
17消毒供应室医院感染管理制度_精品文档.doc
-
15附加住院津贴保险条款的费率-人保财险备-健康附号_精品文档.doc
-
19陕西省崔家沟监狱罪犯医疗防疫总站突发事件预案_精品文档.doc
-
20项护理技术操作规程及评分标准_精品文档.doc
-
初高中英语教学衔接开题报告.docx
-
沉井地压一种特殊表土地压的探讨.docx
-
最新张爱玲名言张爱玲经典爱情语录 精品.docx
-
PRD分享小红书V10产品分析.docx
-
环境影响评价复习题库206重点题库参考答案给学生.docx
-
qq签名繁体字霸气十足.docx
-
《基础会计》综合练习.docx
-
不锈钢装饰板不锈钢橱柜行业分析报告.docx
-
山东省淄博市届高三第一次模拟考试基本能力.docx
-
咳嗽4年.docx
-
《三国演义》整本书阅读导读讲义.docx
-
XX年小区119消防宣传总结.docx
-
餐厅开业标语.docx
-
课外体育活动计划10篇.docx
-
最新文档如何向纪检举报村书记委写检举信举报村书记word范文模板 23页.docx
-
测量管理体系手册模板.docx
-
活动策划模板.docx
-
瓷砖项目可行性研究报告.docx
-
常见园林植物的科目分类.docx
