 完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx
完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx
- 文档编号:1991927
- 上传时间:2022-10-25
- 格式:DOCX
- 页数:27
- 大小:583.61KB
完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx
《完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx》由会员分享,可在线阅读,更多相关《完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx(27页珍藏版)》请在冰豆网上搜索。
完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答
第一章
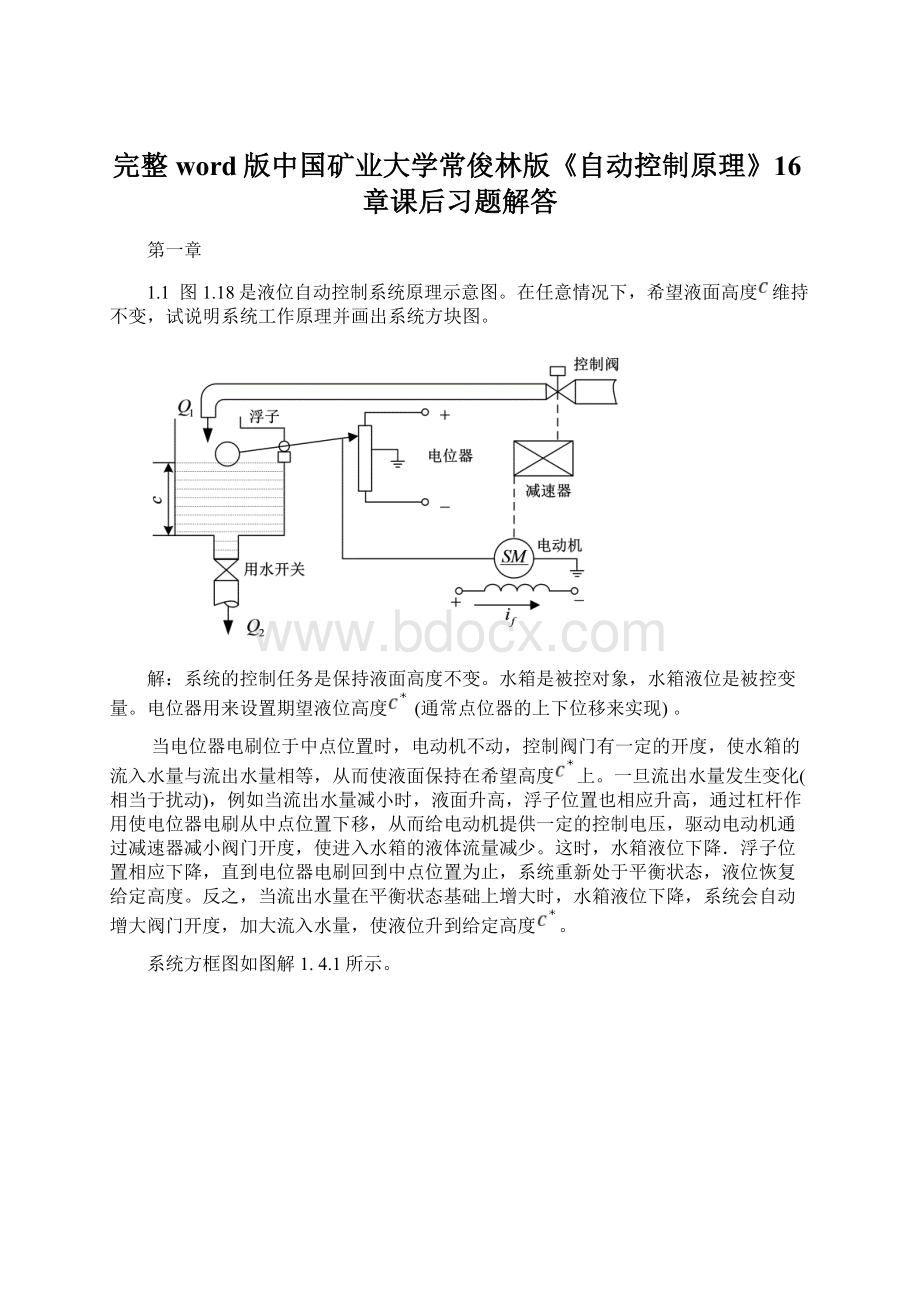
1.1图1.18是液位自动控制系统原理示意图。
在任意情况下,希望液面高度维持不变,试说明系统工作原理并画出系统方块图。
解:
系统的控制任务是保持液面高度不变。
水箱是被控对象,水箱液位是被控变量。
电位器用来设置期望液位高度(通常点位器的上下位移来实现)。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水量与流出水量相等,从而使液面保持在希望高度上。
一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定高度。
系统方框图如图解1.4.1所示。
1.2恒温箱的温度自动控制系统如图1.19所示。
(1)画出系统的方框图;
(2)简述保持恒温箱温度恒定的工作原理;
(3)指出该控制系统的被控对象和被控变量分别是什么。
图1.19恒温箱的温度自动控制系统
解:
恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增高,炉温就上升。
调压器电压由其滑动触点位置所控制,滑臂则由伺服电动机驱动.炉子的实际温度用热电偶测量,输出电压作为反馈电压与给定电压进行比较,得出的偏差电压经放大器放大后,驱动电动机经减速器调节调压器的电压。
在正常情况下,炉温等于期望温度T,热电偶的输出电压等于给定电压。
此时偏差为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。
这时,炉子散失的热量正好等于从电阻丝获取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉温由于某种原因突然下降(例如炉门打开造成热量流失)时,热电偶输出电压下降,与给定电压比较后出现正偏差,经放大器放大后,驱动电动机使调压器电压升高,炉温回升,直至温度值等于期望值为止。
当炉温受扰动后高于希望温度时,调节的过程正好相反。
最终达到稳定时,系统温度可以保持在要求的温度值上。
系统中,加热炉是被控对象,炉温是被控变量,给定量是给定电位器设定的电压(表征炉温的希望值)。
给定电位计是给定元件,放大器完成放大元件的功能,电动机、减速器和调压器组成执行机构,热电偶是测量元件。
系统方框如图解1.4.5所示。
1.3
解:
当负载(与接收自整角机TR的转子固联)的角位置与发送机Tx转子的输入角位置6一致时,系统处于相对豫止状态,自整角机输出电压(即偏差电压)为0,放大器输出为0,电动机不动,系统保持在平衡状态。
当改变时,与失谐,自整角接收机输出与失谐角成比例的偏差电压,该偏差电压经整流放大器、功率放大器放大后驱动电动机转动,带动减速器改变负载的角位置,使之跟随变化,直到与一致,系统达到新的平衡状态时为止。
系统中采用测速发电机TG作为校正元件,构成内环反馈,用于改善系统动态特性。
该系统为随动系统。
被控对象是负载;被控量为负载角位置,给定量是发送自整角机TX转子的角位置。
自整角机完成测量、比较元件的功能,整流放大器、功率放大器共同完成放大元件的功能,电动机SM和减速器组成执行机构,测速发电机TG是校正元件,系统方框图如图解1.4.6所示。
1.4
解工作原理:
温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行前馈补偿,保证热交换器出口的水温波动不大。
系统中,热交换器是被控对象,实际热物料温度为被控变量,冷水流量是干扰量。
系统方框图如图解1.4.4所示。
这是一个按干扰补偿的复合控制系统。
1.5
解带上负载后,由于负载的影响,图(a)与图(b)中的发电机端电压开始时都要下降,但图(a)中所示系统的电压能恢复到110v,而图(b)中的系统却不能。
理由如下;
对图(a)所示系统,当输出电压u低于给定电压时,其偏差电压经放大器K,使电机SM转动,经减速器带动电刷减小发电机G的激磁回路电阻,使发电的激磁电流增大,提高发电机的端电压,从而使偏差电压减小,直至偏差电压为零时,电机才停止转动。
因此,图(a)系统能保持110V电压不变。
对图(b)所示系统,当输出电压低于给定电压时,其偏差电压经放大器K,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G的端电压回升,偏差电压减小,但是偏差电压始终不可能等于零,因为当偏差电压为零时,,发电机就不能工作。
偏差电压的存在是图(b)系统正常工作的前提条件。
即图(b)中系统的输出电压会低于110V。
第二章
2.1(a)(不考虑物块的重力)
(b)
(c)
2.2
(a)
(b)A点:
(1)
B点:
(2)
由
(1)和
(2)得
(3)
由(3)解出,并代入
(2)得:
经比较可以看出,电网络(a)和机械系统(b)两者参数的相似关系为
2.3
2.4
2.5
2.6
2.7
2.8
(1)
(2)假设电动机时间常数为,忽略电枢电感的影响,可得直流电动机的传递函数为
,为电动机的传递系统,单位为。
又设测速发电机的传递系数为()
系统的传递函数为:
2.9
2.10
第三章
3.1,。
,
。
3.2
。
3.3,。
3.4
由超调量等于15%知,。
再由峰值时间等于0.8秒可得,。
闭环传函,,。
3.5
(1)稳定;
(2)不稳定;(3)不稳定。
3.6
(1)不稳定,右半平面两个根;
(2)临界稳定(不稳定),一对纯虚根
(3)不稳定,右半平面一个根,一对纯虚根
(4)不稳定,右半平面一个根,一对纯虚根
3.7
3.8
3.9
(1)
(2)将代入闭环特征方程后,整理得
,解得
3.10
加入局部反馈前:
开环传递函数,。
加入局部反馈后:
开环传递函数,。
3.11
首先判定系统稳定性,该系统稳定。
开环增益,误差分别为0,1.33,∞,∞
3.12
(1),。
,
(2),。
,
3.14
3.15
(1)
(2)要使系统稳定,需有。
(4)系统不稳定。
第四章
4.1
4.2简要证明:
令为根轨迹上的任意一点,由幅角条件可知:
又根据三角函数关系:
,有
于是有,
,问题得证。
4.3略
4.4
(2)开环增益
(3)根轨迹的分离点为,分离点处对应的开环增益
(根据时,闭环极点之和等于开环极点之和。
可以求出时另一个极点为-108,与虚轴的距离比分离点-21大五倍以上。
二重极点-21为主导极点,可以认为临界阻尼比相对应的开环增益为9.6)
4.5
(1)等效开环传递函数为
分离点为-8.5
(2)等效开环传递函数为
分离点-20
4.6、4.7为正反馈根轨迹,略。
4.8
(2)时,根轨迹与虚轴相交于;时,闭环系统稳定。
(3)时,分离点(一对相等的实数根)为-0.85,第三个闭环极点为-4.3(非主导极点,忽略不计)。
时,非主导的负实数极点都可忽略不计,因为当时,闭环系统为欠阻尼状态。
(4)时等幅震荡,震荡频率为
(5)由作图近似可得,时,。
4.9
简单说明:
Kr<3系统不稳定。
(与虚轴交点)
3 第五章 5.1,T=1 5.2 5.3 (1) (2) (3) 5.4 (1) (2) (3) 5.5 5.6 题号 开环 极点 穿越负实轴次数 奈氏判据 闭环极点 闭环 系统 (1) P=0 Z=P-2N=2 不稳定 (2) P=0 Z=P-2N=0 稳定 (3) P=0 Z=P-2N=2 不稳定 (4) P=0 Z=P-2N=0 稳定 (5) P=1 Z=P-2N=0 稳定 (6) P=0 Z=P-2N=0 稳定 (7) P=0 Z=P-2N=0 稳定 (8) P=1 Z=P-2N=2 不稳定 5.7 (1) (2) (3) 5.8 (1) (2) (3) 5.9 5.10 由可知: 快速性提高。 5.11 (1) I型系统,r(t)=1 (2) I型系统,r(t)=t (3) (4) (5) (6) (7) 5.12 K增大和T减少 ,不变(稳定裕度不变) 5.13 第六章 6.1取=6,, 6.2取, 6.3 (3)比较两种校正方案的优缺点 稳态性能一样,动态性能比较如下: 动态性能超前网络校正系统好于滞后网络校正系统 抗高频干扰滞后网络校正系统优于超前网络校正系统 6.4 6.5 (1)C图网络种最好 (2)12Hz正弦噪声削减10倍,C种网络满足。 需要串联滞后-超前校正才能实现(由图可得: 校正后系统在75.4rad/s处,是-20dB,20lg0.1=-20,缩小10倍)。 6.6 6.7 ,T应当选得足够小,不影响系统的动态性能。 6.8从物理实现性考虑,取 6.9


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动控制原理 完整 word 中国 矿业大学 常俊林版 自动控制 原理 16 课后 习题 解答
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《巴黎圣母院》3000字读书心得范文.docx
《巴黎圣母院》3000字读书心得范文.docx
-
《看上去很美》电影观后感5篇.docx
-
《房屋建筑学》复习题没答案.docx
-
《春》仿写作文8篇.docx
-
《关于提高农村学生小学语文中年段课外阅读能力的策略研究以古城小学为例》开题报告附课题项目申报表.docx
-
《海底两万里》读书笔记1000字精选多篇.docx
-
《三国演义》读后感1500字.docx
-
15教学4汉语教师资格等级考试.docx
-
《儿童如何学数学》读书笔记精选多篇.docx
-
《教育规划纲要》解读.docx
-
《房屋租赁合同》适用乙方模板1.docx
-
《你我他》教案.docx
-
《经济生活》练习题.docx
-
《侨联章程》.docx
-
《俗世奇人》高中读后感800字.docx
-
9A文信息安全复习题.docx
-
《选择希望人生》教案.docx
-
《创业基础》学习笔记与学习心得.docx
-
《杨氏之子》公开课教案.docx
-
13不符合项整改报告.docx
-
《节约用水珍惜水资源》综合实践活动案例.docx
-
56张从太空看地球的摄影照片.docx
-
《强制性产品认证管理办法》.docx
-
《廉颇蔺相如列传》4.docx
-
201X年安全标语大全word范文模板 17页.docx
-
《地学建模》作业.docx
-
22万亩油茶种植基地及吨年精制茶油生产线项目可行性研究报告书.docx
-
《谈生命》说课稿1.docx
-
《数字化城管系统建设导则》范文word版 12页.docx
-
72高考英语专题复习练习短文改错72.docx
-
《安全生产技术》真题 答案.docx
-
《现代通信网》阶段作业全解读.docx
-
教科版小学品德与社会六年级上册教案全册精品Word下载.docx
-
会计职业道德论文Word格式.docx
-
矿山采掘工程承包合同Word文档格式.docx
-
李肖鸣大学生创业基础考试答案图文稿Word格式.docx
-
05锅炉小径管焊接作业指导书Word文件下载.docx
-
优秀员工评选活动方案Word下载.docx
-
测试方案编写模板包括单元测试集成测试系统测试等Word文件下载.docx
-
隧道施工注意安全事项Word文档下载推荐.docx
-
最新人教部编版道德与法治五年级上册《主动拒绝烟酒与毒品表格》教学设计文档格式.docx
-
省级财政专项资金绩效自评报告文档格式.docx
-
统计练习客观题答案Word文档格式.docx
-
质量检测论文15篇质量检测自动化管理论文网络质量检测研究等Word文档格式.docx
-
生活小妙招Word下载.docx
-
广东省揭阳一中届高三上学期开学摸底联考语文Word下载.docx
-
安全文明施工专项方案Word文件下载.docx
-
广东省秀全中学0910学年高一上学期期中考试英语Word文件下载.docx
-
学年第一学期小学五年级英语期末复习题Word文档下载推荐.docx
-
管理流程图林木采伐许可证办理流程图Word格式文档下载.docx
-
d电线电缆要点文档格式.docx
