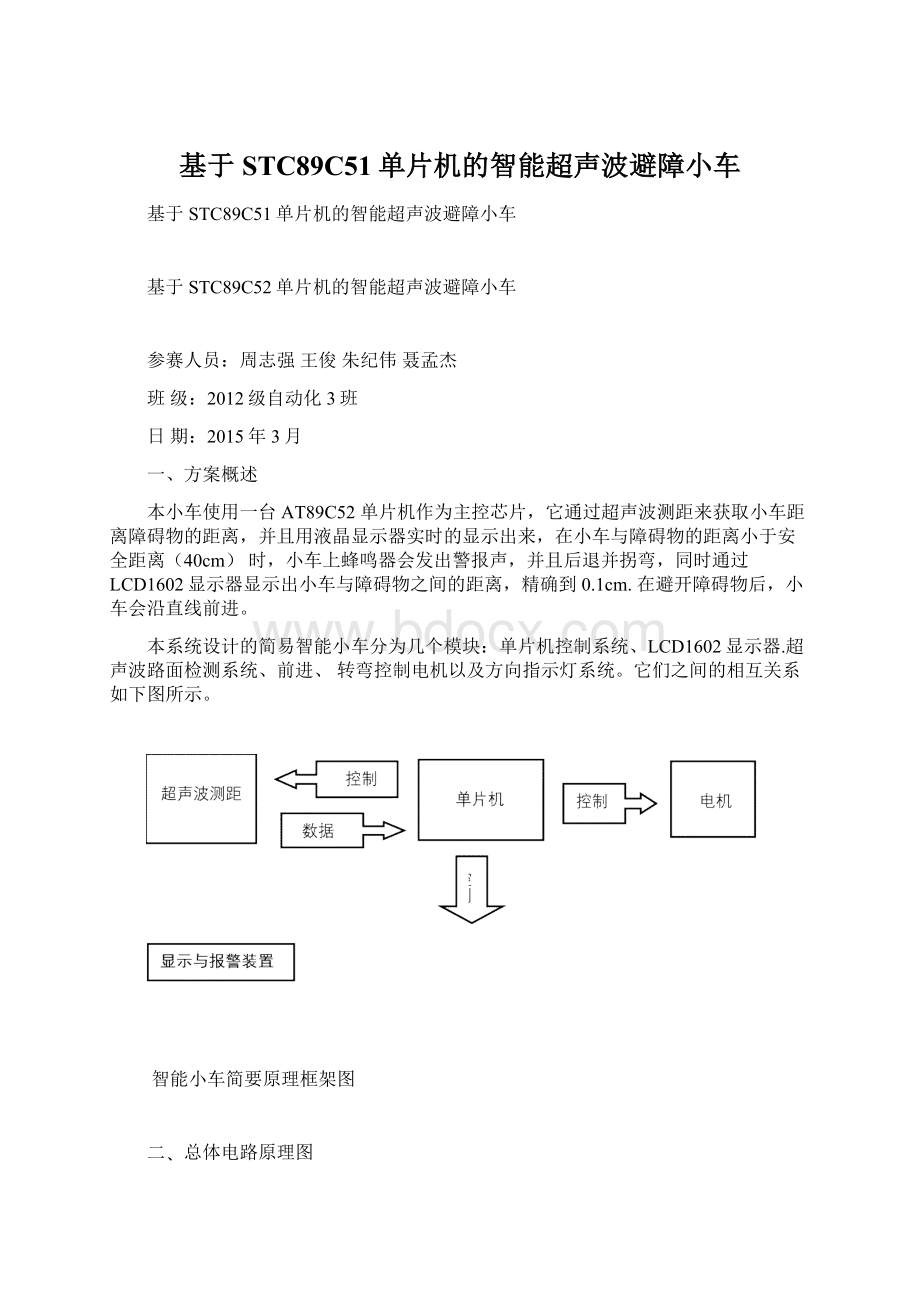
 基于STC89C51单片机的智能超声波避障小车Word格式文档下载.docx
基于STC89C51单片机的智能超声波避障小车Word格式文档下载.docx
- 文档编号:21507817
- 上传时间:2023-01-30
- 格式:DOCX
- 页数:12
- 大小:187KB
基于STC89C51单片机的智能超声波避障小车Word格式文档下载.docx
《基于STC89C51单片机的智能超声波避障小车Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《基于STC89C51单片机的智能超声波避障小车Word格式文档下载.docx(12页珍藏版)》请在冰豆网上搜索。
由此通过发射信号到收到的回响信号时间间隔可以计算得到距离。
公式:
距离=高电平时间*声速(340M/S)/2。
(2)液晶显示模块
如上图所示,整个液晶屏采用标准的16脚接口,其中GND为电源地,VCC接5V正电源,VEE为液晶显示屏对比度调整端,通过一个可调电阻接地,可调电阻调到最大时对比度最弱,可调电阻调到零时对比度最高。
RS为寄存器选择端,高电平时选择数据寄存器、低电平时选择指令寄存器。
RW为读写信号线,高电平时进行读操作,低电平时进行写操作。
当RS和RW共同为低电平时可以写入指令或者显示地址,当RS为低电平RW为高电平时可以读忙信号,当RS为高电平RW为低电平时可以写入数据。
E端为使能端,当E端由低电平跳变成高电平时,液晶屏执行命令。
DB0——DB7为8位双向数据线。
四、流程图及源代码
主函数流程图
N
后退左转一定时间
是否有障碍物
后退右转一定时间
Y
源程序
#include<
at89x51.h>
intrins.h>
#include"
LCD1602display.h"
#defineTXP2_1
#defineRXP2_0
sbitDU=P2^6;
sbitWE=P2^7;
#defineForward_L_DATA180//当前进不能走直线的时候,请调节这两个参数,理想的时候是100,100,最大256,最小0。
0的时候最慢,256的时候最快
#defineForward_R_DATA180//例如小车前进的时候有点向左拐,说明右边马达转速过快,那可以取一个值大一点,另外一个值小一点,例如200190
//直流电机因为制造上的误差,同一个脉宽下也不一定速度一致的,需要自己手动调节
//sbitP4_0=0xc0;
//P4口地址
/*****按照原图接线定义******/
sbitL293D_IN1=P1^2;
sbitL293D_IN2=P1^3;
sbitL293D_IN3=P1^6;
sbitL293D_IN4=P1^7;
sbitL293D_EN1=P1^4;
sbitL293D_EN2=P1^5;
sbitBUZZ=P2^3;
//蜂鸣器
voidcmg88()//关数码管,点阵函数
{
DU=1;
P0=0X00;
DU=0;
}
voidDelay400Ms(void);
//延时400毫秒函数
unsignedcharcodeRange[]="
==RangeFinder=="
;
//LCD1602显示格式
unsignedcharcodeASCII[13]="
0123456789.-M"
unsignedcharcodetable[]="
Distance:
000.0cm"
unsignedcharcodetable1[]="
!
Outofrange"
unsignedchardisbuff[4]={0,0,0,0};
//用于分别存放距离的值0.1mm、mm、cm和m的值
voidCount(void);
//距离计算函数
unsignedinttime=0;
//用于存放定时器时间值
unsignedlongS=0;
//用于存放距离的值
bitflag=0;
//量程溢出标志位
bitturn_right_flag;
//=========================================================================================================================
voidForward(unsignedcharSpeed_Right,unsignedcharSpeed_Left)//前进
L293D_IN1=0;
L293D_IN2=1;
L293D_IN3=1;
L293D_IN4=0;
voidStop(void)//刹车
L293D_IN2=0;
L293D_IN3=0;
voidTurn_Right(unsignedcharSpeed_Right,unsignedcharSpeed_Left)//后退左转
L293D_IN1=1;
Delay(100);
/********距离计算程序***************/
voidConut(void)
{
time=TH1*256+TL1;
TH1=0;
TL1=0;
//此时time的时间单位决定于晶振的速度,外接晶振为11.0592MHZ时,
//time的值为0.54us*time,单位为微秒
//那么1us声波能走多远的距离呢?
1s=1000ms=1000000us
//340/1000000=0.00034米
//0.00034米/1000=0.34毫米也就是1us能走0.34毫米
//但是,我们现在计算的是从超声波发射到反射接收的双路程,
//所以我们将计算的结果除以2才是实际的路程
S=time*2;
//先算出一共的时间是多少微秒。
S=S*0.17;
//此时计算到的结果为毫米,并且是精确到毫米的后两位了,有两个小数点
if(S<
=300)//
{
if(turn_right_flag!
=1)
{
Stop();
Delay1ms(5);
//发现小车自动复位的时候,可以稍微延长一点这个延时,减少电机反向电压对电路板的冲击。
}
turn_right_flag=1;
P2_3=0;
Delay1ms(50);
P2_3=1;
Turn_Right(120,120);
//小于设定距离时电机后退转弯
}
else
turn_right_flag=0;
Forward(Forward_R_DATA,Forward_L_DATA);
//前进(大于20-30CM前进)
//=======================================
if((S>
=5000)||flag==1)//超出测量范围
flag=0;
DisplayListChar(0,1,table1);
disbuff[0]=S%10;
disbuff[1]=S/10%10;
disbuff[2]=S/100%10;
disbuff[3]=S/1000;
DisplayListChar(0,1,table);
DisplayOneChar(9,1,ASCII[disbuff[3]]);
DisplayOneChar(10,1,ASCII[disbuff[2]]);
DisplayOneChar(11,1,ASCII[disbuff[1]]);
DisplayOneChar(12,1,ASCII[10]);
DisplayOneChar(13,1,ASCII[disbuff[0]]);
/********************************************************/
voidzd0()interrupt3//T0中断用来计数器溢出,超过测距范围
flag=1;
//中断溢出标志
RX=0;
/********超声波高电平脉冲宽度计算程序***************/
voidTimer_Count(void)
TR1=1;
//开启计数
while(RX);
//当RX为1计数并等待
TR1=0;
//关闭计数
Conut();
//计算
voidStartModule()//启动模块
TX=1;
//启动一次模块
Delay10us
(2);
TX=0;
/********************************************************/
/*************主程序********************/
voidmain(void)
unsignedchari;
unsignedinta;
cmg88();
//关数码管
Delay1ms(400);
//启动等待,等LCM讲入工作状态
LCMInit();
//LCM初始化
Delay1ms(5);
//延时片刻
DisplayListChar(0,0,Range);
TMOD=TMOD|0x10;
//设T0为方式1,GATE=1;
EA=1;
//开启总中断
ET1=1;
//允许T0中断
//===============================
//PWM_ini();
//=================================
B:
for(i=0;
i<
50;
i++)//判断K3是否按下
Delay1ms
(1);
//1ms内判断50次,如果其中有一次被判断到K3没按下,便重新检测
if(P3_6!
=0)//当K3按下时,启动小车
gotoB;
//跳转到标号B,重新检测
//蜂鸣器响一声
BUZZ=0;
//50次检测K3确认是按下之后,蜂鸣器发出“滴”声响,然后启动小车。
Delay1ms(50);
BUZZ=1;
//响50ms后关闭蜂鸣器
//=======================================================================================================================
while
(1)
RX=1;
StartModule();
//启动模块
for(a=951;
a>
0;
a--)
if(RX==1)
Timer_Count();
//超声波高电平脉冲宽度计算函数
}
结束语:
本系统有STC89C52单片机,超声波模块,LCD1602显示器,报警系统等组成。
STC89C52控制电机的转动和报警系统的动作。
LCD1602显示智能型小车到障碍物之间的距离便于人查看。
智能小车能够实现自动避障,自动报警,实时监控障碍距离的功能。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 STC89C51 单片机 智能 超声波 小车
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
06岁发育迟缓或孤独症儿童 认知和语言的训练讲述.docx
-
09经济师初级经济基础试题及答案解析单选.docx
-
13硫和氮78.docx
-
20XX年关于青蛙的睡前故事啊.docx
-
25W2 EL34推挽功放.docx
-
01刘飞碟制造技术之静态磁能发电.docx
-
06内筒切割拆除施工方案终版.docx
-
6上海建筑工程交通设计及停车库场设置标准.docx
-
16Mn钢热处理课程设计.docx
-
20XX年高一英语教师学期末工作总结高一英语教师学期末工作总结2.docx
-
《通风与安全初级读本》考试题库.docx
-
5号联巷作业规程.docx
-
35kV线路竣工验收签证书.docx
-
18春北理工《经济法》在线作业满分答案.docx
-
41凸轮机构的应用和分类.docx
-
56系统概要设计说明书范文模板.docx
-
1000句日常英文.docx
-
2464《建筑工程招投标与合同管理》机考复习资料.docx
-
ACCESS窗体查询实例.docx
