 Vray参数设置详解.docx
Vray参数设置详解.docx
- 文档编号:23558340
- 上传时间:2023-05-18
- 格式:DOCX
- 页数:14
- 大小:127.59KB
Vray参数设置详解.docx
《Vray参数设置详解.docx》由会员分享,可在线阅读,更多相关《Vray参数设置详解.docx(14页珍藏版)》请在冰豆网上搜索。
Vray参数设置详解
Vray参数设置详解
注:
红色标注部分为控制图像噪点的选项,方框标注部分为参数调整范围。
灰色标注部分为注意事项和知识点。
一、Indirectillumination(间接照明)标签栏
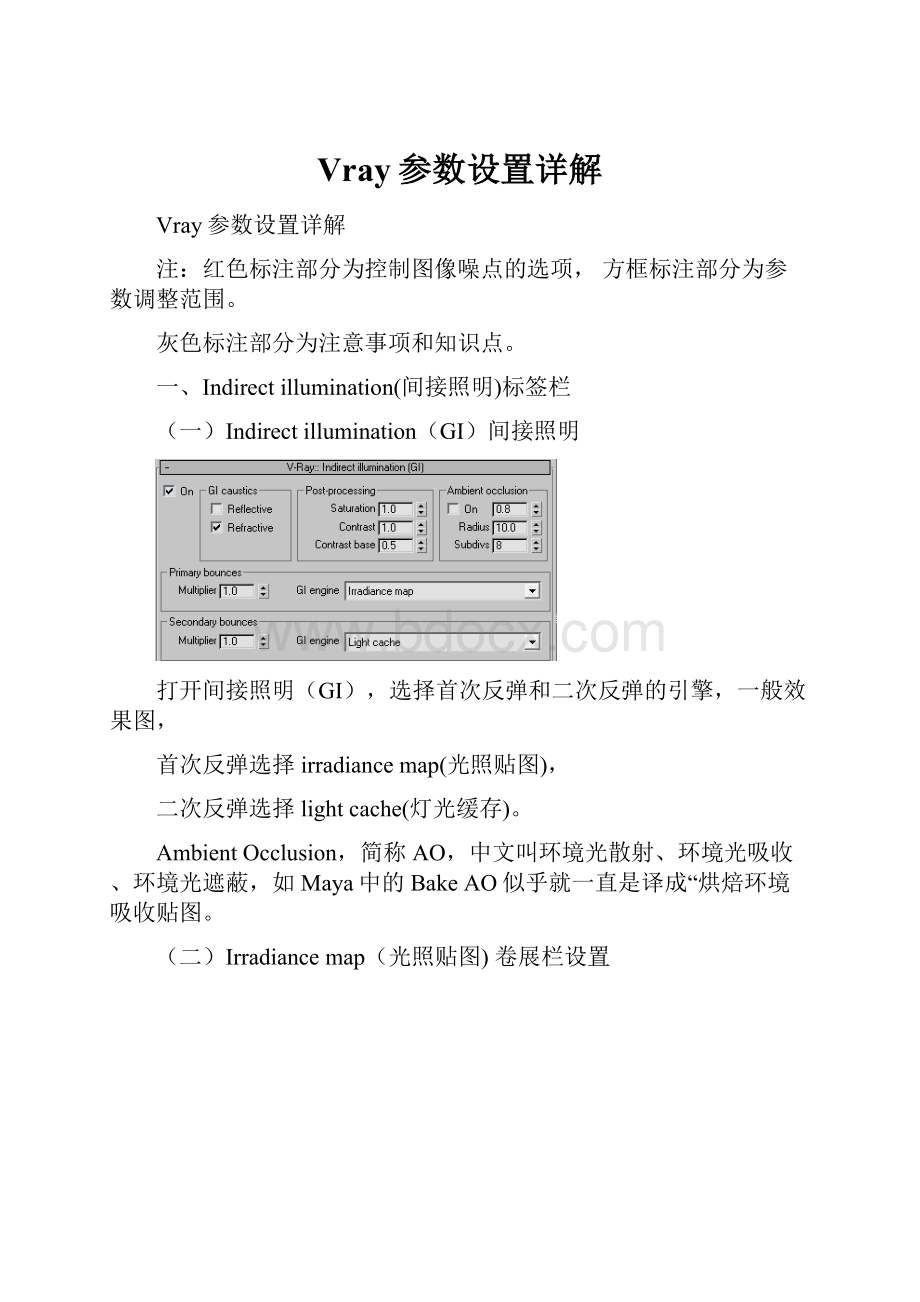
(一)Indirectillumination(GI)间接照明
打开间接照明(GI),选择首次反弹和二次反弹的引擎,一般效果图,
首次反弹选择irradiancemap(光照贴图),
二次反弹选择lightcache(灯光缓存)。
AmbientOcclusion,简称AO,中文叫环境光散射、环境光吸收、环境光遮蔽,如Maya中的BakeAO似乎就一直是译成“烘焙环境吸收贴图。
(二)Irradiancemap(光照贴图)卷展栏设置
参数设置:
1、Minrat(最小比率):
测试值:
-3至-6出图值:
-3
2、Maxrat(最大比率):
测试值:
-3至-5出图值:
-1至0
3、HSphsubdivs(半球细分值):
测试值:
30出图值:
60-80
注:
比较省事的办法是选择常用预设,测试时,选择verylow(非常低),出图时选择medium(中等)即可。
detailenhancement(细节增强):
知识点:
细节增强算法为场景中的细节而设计。
由于IrradianceMap自身的分辨率限制,在渲染过程中会虚化图像,致使产生杂点和闪烁。
Detailenhancement是一种通过高精度的Brute-force采样方式的计算的方式。
这个和ambientocclusion(OCC)的计算方式类似,但是更加精确,而且会将光线弹射也一起计算。
Scale:
这个属性定义了半径的单位。
Screen:
半径是以像素计算的
World:
半径是以世界单位来计算的
(三)lightcache(灯光缓存)
1、Subdivs(细分值):
测试值:
100出图值:
800-1200
2、Samplesize(采样尺寸):
测试值:
0.02出图值:
无限接近于0(Samplesize可控制图像中噪点的多少)
二、V-RAY标签栏
(一)framebuffer帧缓存
1、enablebuilt-inframebuffer(创建内置帧缓存窗口)
关闭common公共参数标签栏下max默认帧缓存窗口Renderedframewindow,打开framebuffer下的enablebuilt-inframebuffer(创建内置帧缓存窗口)。
2、Rendertomemoryframe:
把图像渲染到内存中
以便渲染完毕后进行观察,但也可以不选这一项,而是直接把渲染的图像存储为一个文件(v-rayrawimagefile)
3、showlastVFB:
显示最近一次渲染的图像。
4、outresolution:
输出分辨率
Getresolutionfrommax:
使用max系统的分辨率。
常用技巧:
无论是否取消了max帧缓存的显示,但是在内存中还是进行了max内置帧缓存图像的储存,所以,为了最大程度节省内存,一般情况下,要把common公共参数下的max公用设置分辨率的宽、高值设最小值1,并在framebuffer卷展栏下设置图像分辨率。
5、splitrenderchannels分离渲染通道
Saveseparaterenderchannels:
保存为单独是渲染通道。
(二)imagesampler/Antialiasing(图像采样器/抗锯齿)
1、imagesampler(图像采样器)类型选择:
参数解释:
(1)Fixed:
固定
(2)AdaptiveDMC:
自适应DMC(确定性蒙特卡罗,适用于场景细节多、复杂、有模糊反射、景深等元素的复杂场景)
(3)Adaptivesubdivition:
自适应细分(*效果图常用*根据场景中的明暗进行采样,适用于场景比较清晰,没有模糊、景深的情况)
注:
自适应DMC抗锯齿比较好,其次是自适应细分。
渲染时间:
自适应dmc>自适应细分>固定,时间大约相差了3倍左右,图像质量与渲染时间成正比。
2、AntialiasingFiller(抗锯齿过滤器)的选择:
参数解释(常用):
(1)MitchellNetravali:
米切尔过滤器(使边缘更加模糊)
(2)Catmullrom:
卡特姆过滤器(使边缘更加锐利)
测试值:
选择fixed固定采样器,关掉过滤器,细分为1;
出图值:
选择AdaptiveDMC或adaptivesubdivition采样器,过滤器选择MitchellNetravali(模糊边缘)或Catmullrom(锐利边缘)。
出图时,经常选择Catmullrom(锐利边缘)。
(三)AdaptiveDMCimagesampler/Adaptivesubdivitionimagesampler。
以上卷展栏出现哪一个,取决于抗锯齿采样器的选择类型。
(1)Minsubdivs:
最小细分
(2)Maxsubdivs:
最大细分。
(3)Clrthresh:
颜色阈值
(三)Environment(环境)
1、GIEnvironmentskylightoverride(天光替代)
大气将太阳光反射下来的重新照明,是一种间接照明。
前提是打开间接照明,Indirectillumination(GI)
在半开放、有室外环境参与的情况下需要开启天光,在封闭和夜景环境下不需要开启天光。
还可以使用HDRI贴图,拖拽到材质浏览器窗口,指定一张HDRI贴图,加大整体倍增值(overallmultiplier),即可用HDRI贴图照亮场景,此时Environment面板上的天光替代倍增值就失效了。
2、Reflection/refractionEnvironmentoverride
反射、折射环境替代
3、RrefractionEnvironmentoverride
折射环境替代
(四)Globalswiches(全局开关)
常用参数:
1、Override(替代材质):
测试场景布光分析时需要用到。
2、Overrideexclude(替代材质排除):
指定场景中某个物体不使用替代材质,使用自身材质,将期排除。
3、Glossyeffect:
使用一种非光滑的效果进行渲染,测试时能够加快渲染速度。
4、Rflection/refrection:
反射/折射开关,
5、Maxdepth:
最大反射次数。
6、Don’trenderfinalimage(不渲染最终图像),在用低分辨率跑光子图的时候,不渲染图像,只计算光子图。
7、Defaultlight:
是否关闭系统默认灯光。
8、secondaryraysbias:
二次光线偏移。
有时图像上会有一些处理不了的黑斑,调节这个参数,有时就能消除。
另外,渲染纹理烘焙贴图时此参数有用。
9、compatibility:
兼容适配老版本的vary算法。
10、use3dsmaxphotometricscale:
使用3dsmax光度学比例。
(五)colormapping(颜色贴图)
曝光类型选择:
1、Linearmultiply(线性倍增曝光):
图像比较亮丽,但有光源的地方容易曝光。
2、Exponential(指数曝光):
画面不会有曝光,但画面的饱和度、明暗关系会差一些。
3、HSVExponential(HSV指数曝光):
能控制颜色的饱和度。
4、intensityExponential(亮度指数曝光):
保持图像亮度不变。
5、Gammacorrection(伽马校正曝光):
自动对Gamma值进行校正,就像photoshop里的自动伽马值。
6、intensityGamma(亮度伽马曝光):
除了对Gamma值进行校正,还能修正图像中的灯光亮度。
7、Reinhard(莱因哈德曝光):
即混合曝光。
把Linearmultiply(线性倍增曝光)、Exponential(指数曝光)进行混合使用,可以发挥这两种常用曝光方式的优点,即使画面亮丽,又使画面比较平和。
最常用这个选择。
参数解释:
——选择Linearmultiply/Exponential时:
darkmultiplier:
暗部倍增
Brightmultiplier:
亮部倍增
——选择Reinhard时:
multiplier:
倍增
burnvalue:
混合值
混合值的值为1是,为线性曝光,值为0时为指数曝光。
Affectbackground影响背景:
使当前的曝光方式影响到背景。
Clampoutput限制输出:
勾选时,场景中使用的HDRI背景贴图不受控制,不勾选时,可以控制场景中使用的HDRI背景贴图,室内图一般不会用到。
三、Setting(设置)标签栏
(一)DMCsampler(DMC采样)
知识点1:
蒙特卡罗的基本思想是什么?
蒙特卡罗的基本思想:
当所求解问题是某种随机事件出现的概率,或者是某个随机变量的期望值时,通过某种“实验”的方法,以这种事件出现的频率估计这一随机事件的概率,或者得到这个随机变量的某些数字特征,并将其作为问题的解。
知识点2:
QMC和DMC的区别是什么?
名词解释:
QMC准蒙特卡罗;DMC:
确定性蒙特卡罗
QMC准蒙特卡罗:
是蒙特卡罗算法的一个变种,它的取样范围比纯蒙特卡罗算法要小,所以计算会更快,但是在渲染动画时会有闪烁和噪点出现。
DMC确定性蒙特卡罗:
是QMC的改良版,“确定性”的意思是指,根据某种规则,每次采样都根据一个确定的采样数据序列,也就是每次采样时都有一个确定的值,所以叫确定性蒙特卡罗。
DMC带来的最大变化就是,渲染动画时,减少了阴影的闪烁和噪点的出现,DMC在采样的范围上也包括了QMC。
知识点3:
DMC的“早期性中止”特性是什么意思?
早期性中止:
在渲染一张图像时,最开始使用较低的采样值大块地进行渲染,如果没有达到预期的效果,就会继续进行更加细致的采样,直到达到预期的效果,就会停止采样,而不是无限制的一直采样下去,这种性质就叫做早期性中止。
参数设置:
1、Adaptiveamount:
自适应数量
含义:
值为0时不使用早期性中止,采样时间会很长、很慢;
值越大,渲染时间越快。
2、Noisethreshold(噪点极限值):
控制图像的模糊程度和噪点;它决定了Vray在执行早期性终止技术之前,对场景进行评估的准确性,较小的数值有较高的准确性,噪点越少,较大的数值有较低的准确性,噪点越多。
3、Minsample(最小采样):
在早期性中止之前,最少需要采样的数量,值越大,速度越慢,效果越好。
4、Globalsubdivsmultiplier(全局细分倍增)
除了有设置的参数外,其他关于模糊的参数都受这个参数的控制,如景深、面积阴影、平滑折射等。
它控制的是Vray全部的细分的倍增值,他会对之前第三点里的所以细分值全部倍增,所以要谨慎使用!
!
5、Timeindependent(时间独立):
用于处理动画时所有,即帧到帧的采样是一样的。
测试值:
默认即可。
出图值:
Adaptiveamount:
(0.85-0.5)Noisethreshold:
(0.02-0.002)
Minsample:
(8-20)
(二)system(系统)
1、Raycasterparams光线投射参数组:
涉及到一个比较复杂的算法:
BSP,二元空间划分数。
知识点1:
BSP(二元空间划分数)的解释
BSP(二元空间划分数):
一个有光线的场景中,光线打到物体身上后产生了物体的轮廓,有时一个场景的面娄会很大,Vray采用了BSP算法,通过分级的形式进行划分,先找到一个大的块,再对大的块进行划分,这里比喻成一棵树,树下面有枝、枝下面有叶,这种算法可以方便的实现对树、枝、叶的各个节点进行整体控制,也可以对每一个叶的最末端进行具体控制。
弄懂了这个算法的原理,就很好理解下面参数的意义了。
(1)Maxtreedepth(最大树深度):
控制最大分多少层
(2)minleafsize(最小叶节点尺寸):
(3)face/levelcoef(叶节点中三角面的数量)
(4)dynamicmemorylimit(动态内存极限)
(5)Defaultgeometry(光线投射引擎)
知识点2:
Vray动态内存极限(Dynamicmemorylimit)的解释
随着现在计算机硬件的不断更新,CG行业对视觉的要求也越来越高,以前做建筑效果图的基本都是在max里渲染一下主体建筑之类的,然后后期基本都交给了Photoshop,随着现在硬件的提高,建筑效果图也越来越向全模渲染方向发展,这就要求配景和人物、车辆之类的都必须在前期渲染的时候就要渲染出来,尤其是对做建筑动画来说,前期的树木、人物、车辆等配景只有先在场景里布置好,虽然可以用代理,但是动不动几百万个面的场景也很常见,所以现在作图用64位系统也成为一种趋势,因为能够更好的发挥大内存的优势,拿Vray来说,系统设置面板里的“动态内存极限(Dynamicmemorylimit)”这个选项就可以较好的派上用场了,以前对于32位系统,基本保持默认的400就够了,如果用64位系统,而且物理内存比较大的话就可以把这个值调大一些,这样有利于渲染速度的提高,但是这个值具体要设置多少才合理,市面上关于这方面的讲解基本都比较简单,比如“动态内存限制:
用来限制Vray渲染时的内存使用量。
”深入的讲解很难找到,XX搜遍了都没找到合适的解释,今天Google了一下,总算找到了比较独到的讲解,看来还是Google比较靠谱。
。
。
下面就是关于Vray动态内存极限(Dynamicmemorylimit)的最终解释:
在Vray运行中,几何物件载入与载出取决于场景的哪个部份被渲染,Vray的动态光线投射器(dynamicraycaster)能提取的总内存(总记忆体)量由"Dynamicmemorylimit"(动态内存限制)这个参数所控制。
"Dynamicmemorylimit"(动态内存限制)指的是对动态光线投射器所使用的总内存量的限制,用于动态的生成几何体。
这里所说的总内存指的是你电脑上实际所安装的内存(记忆体,RAM)量,要注意的是内存共用区(memorypool)是由各个渲染线程所共享的。
因而,如果需要过于频繁的载入与载出几何体,各线程必然会相互等待对方,渲染性能就会受到影响。
Vray对"Dynamicmemorylimit"的内定值是400,它的单位是Mb,因此400就表示是400Mb。
假如你的电脑作业系统是64-bit,运行64-bit版本的应用程序就不会受到4Gb内存量的制约。
假如你的电脑上安装了8GB的主内存,那么它们都能给这个应用程序用上,当然你可以把"Dynamicmemorylimit"设得高一些,藉此提升Vray渲染的性能。
有一个说法,不要超过总内存量的一半,也就是说主内存有8Gb,这个"Dynamicmemorylimit"设置成4000Mb(将近4Gb)比较适当。
假如你的电脑上没有这么多主内存,或者你安装的是32-bit作业系统,实际上容许Vray使用的最大总内存量就只有2Gb,那么还是老实一点,就使用内定的400Mb吧!
终究"Dynamicmemorylimit"只对动态生成几何体有用处,整个渲染过程中还有许多其它的部份都需要使用到内存空间。
因而,别贪心,设置得太高反而会使Vray的渲染性能下降。
下面是对64-bit版本并装有8Gb主内存电脑运行Vray的一部份设置建议:
"maxtreedepth"设置为80
"minleafsize"设置为0
"facelevelcoefficient"设置为1
"Dynamicmemorylimit"设置为4000
2、renderregiondivision渲染区域划分
对于分布式渲染(网络渲染)是非常重要的。
Regionsequence:
渲染顺序:
如果场景中有很多复杂物体,使用三角形序列,可以加快渲染速度。
3、framestamp帧水印,在渲染的图像下方显示渲染信息,可自定义。
4、distributedrendering:
分布式渲染开关
5、vraylog(Vray日志文件):
Vray渲染日志信息窗口的开关。
6、miscellaneousoptions其他参数:
(1)Max-compatibleshadecontext:
保持max的兼容性
(2)checkformissingfiles:
检查丢失文件
(3)optimizedatmosphericevaluation:
最优化大气评估
前面有一个大气效果,但是后面的明暗还是先计算的,勾选此项,先计算大气效果,如果大气很密,可以影响到后面的明暗。
(4)lowthreadpriority:
低线程优先
渲染Vray的时候,如果想做其他事情,可以勾选此项虽然渲染慢一些,但是电脑不会特别卡。
(三)Defaultdisplacement(默认置换)
当场景中有置换材质,却没有指定置换修改器,那么这个物体的置换效果就要通过Defaultdisplacement进行控制。
一般该项所有值都可以保持默认即可。
置换算法是一个V三角算法。
1、override:
使用Vray的V三角算法进行置换渲染,不勾选,就使用Max标准的置换渲染。
2、edgelength:
V三角形的边长,值越小,V三角数量越多,置换效果越好,渲染时间越慢。
单位为pixes(像素)
3、View-dependent:
使V三角形的像素比产生关系。
如边长为1,即图像上一个像素就代表一个V三角的边长。
4、maxsubdivs:
最大细分数,这个值是平方数,值越大,效果越好,
一个正常的网格可以分成2562(256×26)个V三角。
5、Amount数量:
表现置换效果的强烈程度。
6、relativetobox:
置换的数量是从边界盒开始的,稍微提高一下速度。
7、Tightbounds:
密封边界,置换的时候使用最精确的模型体积进行计算。
勾选后,会对置换进行预采样,渲染速度会提高一些,不勾选,就不会进行预采样,渲染时间会增长一点。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- Vray 参数设置 详解
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《公务员财产申报制度》.docx
《公务员财产申报制度》.docx
-
《儿童口腔病学》汇总题库集.docx
-
《建筑施工组织与管理》教案教学内容.docx
-
《班委选举细则》.docx
-
《光伏组件监造技术标准》.docx
-
《年终表彰大会讲话稿 表彰大会致辞稿》.docx
-
《听颖师弹琴》《李凭箜篌引》分别鉴赏及对比鉴赏加练习人教版高一选修.docx
-
《鹬》分镜头脚本.docx
-
5套打包宜昌市小学四年级语文上期中考试单元测试题及答案.docx
-
16开纸田字格word字帖模板.docx
-
315食品安全活动策划书.docx
-
CFG桩基础施工方案详解.docx
-
08人机工程学中英文资料外文翻译文献.docx
-
《读古典名著口百味人生》获奖精品省优获奖教案 部编版语文精品.docx
-
《功课很重要》教案1学习资料.docx
-
《冷拼工艺》教案.docx
-
《唐人街探案3》电影观后感《唐人街探案3》心得作文5篇.docx
-
《C语言程序设计》习题.docx
-
《幼儿园课程游戏化的实践研究》.docx
-
4现场管理档案.docx
-
13级西医专业基础综合测评答.docx
-
100部校园电影全.docx
-
CAD制图标准.docx
-
《分数除法一.docx
-
edb72192ac02de80d4d8d15abe23482fb5da0291.docx
-
H236车联网资料路尚行业版OMP操作手册服务商0618.docx
-
jarlasscon门机.docx
-
《百分百责任学习心得》.docx
-
《管理学基础》习题18章单凤儒.docx
-
《旅游专业日语》课程实施方案.docx
-
《铁路旅客运输服务》学习指导书.docx
-
《预算会计》课程标准.docx
-
广东省深圳市中考英语试题含答案.docx
-
呼吸习题答案.docx
-
护士个人工作计划医院模板精选5篇.docx
-
护士执业资格考试真题包括答案解析docx.docx
-
华业煤业4109工作面掘进作业规程.docx
-
淮南市城市衡宇装饰装修合同.docx
-
环境保护和水土保持专项施工方案设计.docx
-
环氧乙烷灭菌柜确认.docx
-
会计模拟练习题含答案2306.docx
-
混合痔病历模板00001.docx
-
呼啸山庄读书笔记15篇.docx
-
湖南省雅礼中学届高三第七次月考英语试题及答案.docx
-
互换性与测量技术基础第四版习题答案王伯平主编机械工程出版社.docx
-
护患沟通之国内外比较.docx
-
华政刑事诉讼法期末考试整理.docx
-
淮南市建筑施工安全质量标准化示范工地申报考核管理办法.docx
-
环境保护全套教案选修.docx
-
会计模拟试题与答案二.docx
-
会计学生职业生涯规划书.docx
