 《机械设计基本》6章课后完全精美答案解析有了它绝对不用愁.docx
《机械设计基本》6章课后完全精美答案解析有了它绝对不用愁.docx
- 文档编号:23943781
- 上传时间:2023-05-22
- 格式:DOCX
- 页数:57
- 大小:533.38KB
《机械设计基本》6章课后完全精美答案解析有了它绝对不用愁.docx
《《机械设计基本》6章课后完全精美答案解析有了它绝对不用愁.docx》由会员分享,可在线阅读,更多相关《《机械设计基本》6章课后完全精美答案解析有了它绝对不用愁.docx(57页珍藏版)》请在冰豆网上搜索。
《机械设计基本》6章课后完全精美答案解析有了它绝对不用愁
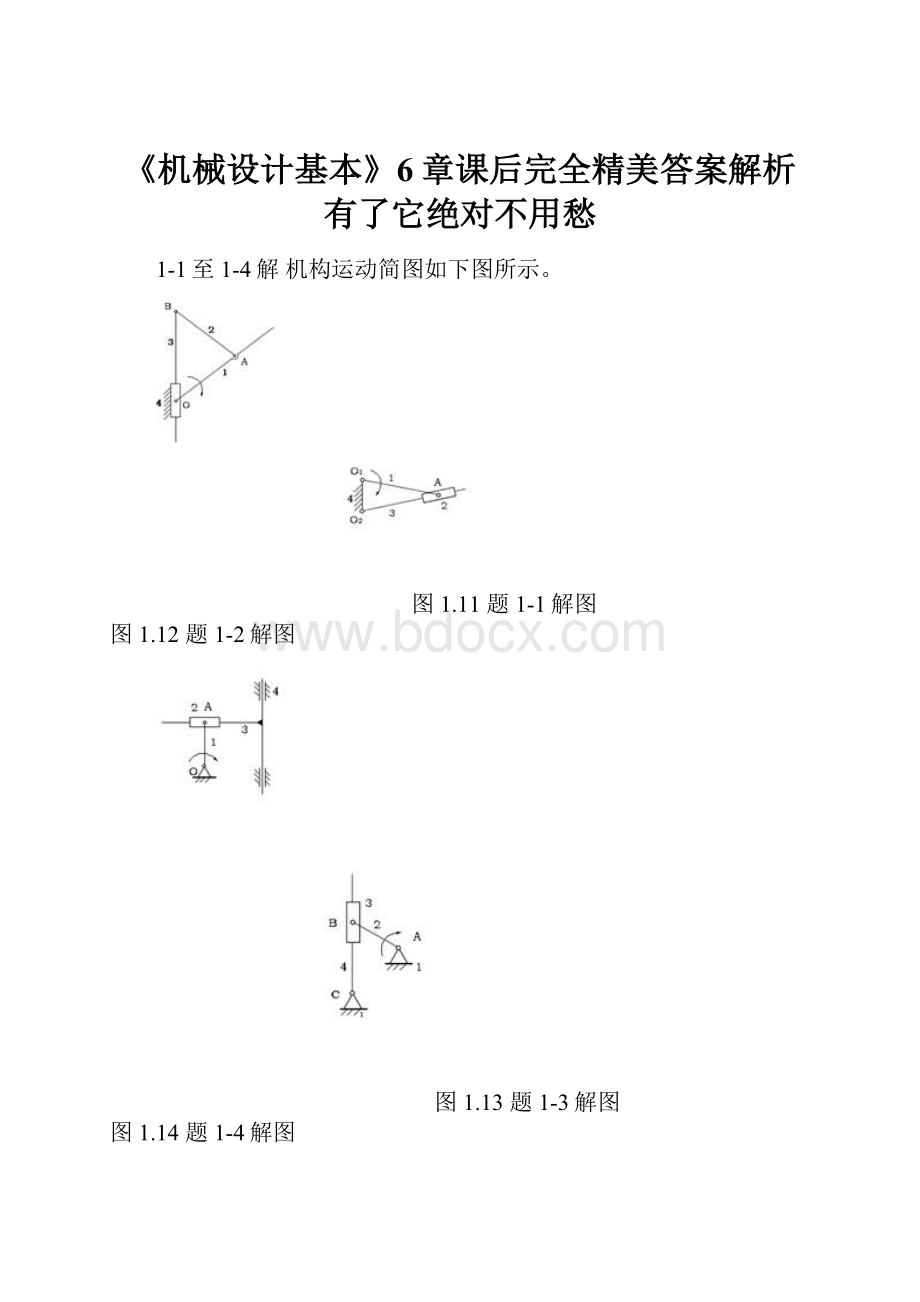
1-1至1-4解机构运动简图如下图所示。
图1.11题1-1解图 图1.12题1-2解图
图1.13题1-3解图 图1.14题1-4解图
1-5解
1-6解
1-7解
1-8解
1-9解
1-10解
1-11解
1-12解
1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:
1-14解该正切机构的全部瞬心如图所示,构件3的速度为:
,方
向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即
,
和
,如图所示。
则:
,轮2与轮1的转向相反。
1-16解
(1)图a中的构件组合的自由度为:
自由度为零,为一刚性桁架,所以构件之间不能产生相对运
动。
(2)图b中的CD杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:
所以构件之间能产生相对运动。
题2-1答:
a)
,且最短杆为机架,因此是双曲柄机构。
b)
,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c)
,不满足杆长条件,因此是双摇杆机构。
d)
,且最短杆的对边为机架,因此是双摇杆机构。
题2-2解:
要想成为转动导杆机构,则要求
与
均为周转副。
(1)当
为周转副时,要求
能通过两次与机架共线的位置。
见图2-15中位置
和
。
在
中,直角边小于斜边,故有:
(极限情况取等号);
在
中,直角边小于斜边,故有:
(极限情况取等号)。
综合这二者,要求
即可。
(2)当
为周转副时,要求
能通过两次与机架共线的位置。
见图2-15中位置
和
。
在位置
时,从线段
来看,要能绕过
点要求:
(极限情况取等号);
在位置
时,因为导杆
是无限长的,故没有过多条件限制。
(3)综合
(1)、
(2)两点可知,图示偏置导杆机构成为转动导杆机构的条件是:
题2-3见图2.16。
图2.16
题2-4解:
(1)由公式
,并带入已知数据列方程有:
因此空回行程所需时间
;
(2)因为曲柄空回行程用时
,
转过的角度为
,
因此其转速为:
转/分钟
题2-5
解:
(1)由题意踏板
在水平位置上下摆动
,就是曲柄摇杆机构中摇杆的极限位置,此时
曲柄与连杆处于两次共线位置。
取适当比例图尺,作出两次极限位置
和
(见图
2.17)。
由图量得:
,
。
解得:
由已知和上步求解可知:
,
,
,
(2)因最小传动角位于曲柄与机架两次共线位置,因此取
和
代入公式(2-3)
计算可得:
或:
代入公式(2-3)′,可知
。
(4)作
的外接圆,在圆上取点
即可。
在图上量取
,
和机架长度
。
则曲柄长度
,摇杆长度
。
在得到具体各杆数据之后,代入公式(2—3)和(2-3)′求最小传动
角
,能满足
即可。
图2.18
题2-7
图2.19
解:
作图步骤如下(见图2.19):
(1)求
,
;并确定比例尺
。
(2)作
,顶角
,
。
(3)作
的外接圆,则圆周上任一点都可能成为曲柄中心。
(4)作一水平线,于
相距
,交圆周于
点。
(5)由图量得
,
。
解得:
曲柄长度:
连杆长度:
题2-8
解:
见图2.20,作图步骤如下:
(1)
。
(2)取
,选定
,作
和
,
。
(3)定另一机架位置:
角平
分线,
。
(4)
,
。
杆即是曲柄,由图量得曲柄长度:
题2-9解:
见图2.21,作图步骤如下:
(1)求
,
,由此可知该机构没有急回特性。
(2)选定比例尺
,作
,
。
(即摇杆的两极限位置)
(3)做
,
与
交于
点。
(4)在图上量取
,
和机架长度
。
曲柄长度:
连杆长度:
题2-10解:
见图2.22。
这是已知两个活动铰链两对位置设计四杆机构,可以用圆心法。
连
接
,
,作图2.22
的中垂线与
交于
点。
然后连接
,
,作
的中垂线
与
交于
点。
图中画出了一个位置
。
从图中量取各杆的长度,得到:
,
,
题2-11解:
(1)以
为中心,设连架杆长度为
,根据
作出
,
,
。
(2)取连杆长度
,以
,
,
为圆心,作弧。
(3)另作以
点为中心,
、
,
的另一连架杆的几个位置,并作出不同
半径的许多同心圆弧。
(4)进行试凑,最后得到结果如下:
,
,
,
。
机构运动简图如图2.23。
题2-12解:
将已知条件代入公式(2-10)可得到方程组:
联立求解得到:
,
,
。
将该解代入公式(2-8)求解得到:
,
,
,
。
又因为实际
,因此每个杆件应放大的比例尺为:
,故每个杆件的实际长度是:
,
,
,
。
题2-13证明:
见图2.25。
在
上任取一点
,下面求证
点的运动轨迹为一椭圆。
见图
可知
点将
分为两部分,其中
,
。
又由图可知
,
,二式平方相加得
可见
点的运动轨迹为一椭圆。
3-1解
图3.10题3-1解图
如图3.10所示,以O为圆心作圆并与导路相切,此即为偏距圆。
过B点作偏距圆的下切线,此线为
凸轮与从动件在B点接触时,导路的方向线。
推程运动角
如图所示。
3-2解
图3.12题3-2解图
如图3.12所示,以O为圆心作圆并与导路相切,此即为偏距圆。
过D点作偏距圆的下切线,此线为
凸轮与从动件在D点接触时,导路的方向线。
凸轮与从动件在D点接触时的压力角
如图所示。
3-3解:
从动件在推程及回程段运动规律的位移、速度以及加速度方程分别为:
(1)推程:
0°≤
≤150°
(2)回程:
等加速段
0°≤
≤60°
等减速段
60°≤
≤120°
为了计算从动件速度和加速度,设
。
计算各分点的位移、速度以及加速度值如下:
总转角
0°
15°
30°
45°
60°
75°
90°
105°
位移(mm)
0
0.734
2.865
6.183
10.365
15
19.635
23.817
速度(mm/s)
0
19.416
36.931
50.832
59.757
62.832
59.757
50.832
加速度(mm/s2)
65.797
62.577
53.231
38.675
20.333
0
-20.333
-38.675
总转角
120°
135°
150°
165°
180°
195°
210°
225°
位移(mm)
27.135
29.266
30
30
30
29.066
26.250
21.563
速度(mm/s)
36.932
19.416
0
0
0
-25
-50
-75
加速度(mm/s2)
-53.231
-62.577
-65.797
0
-83.333
-83.333
-83.333
-83.333
总转角
240°
255°
270°
285°
300°
315°
330°
345°
位移(mm)
15
8.438
3.75
0.938
0
0
0
0
速度(mm/s)
-100
-75
-50
-25
0
0
0
0
加速度(mm/s2)
-83.333
-83.333
83.333
83.333
83.333
0
0
0
根据上表作图如下(注:
为了图形大小协调,将位移曲线沿纵轴放大了5倍。
):
图3-13题3-3解图
3-4解:
图3-14题3-4图
根据3-3题解作图如图3-15所示。
根据(3.1)式可知,
取最大,同时s2取最小时,凸轮
机构的压力角最大。
从图3-15可知,这点可能在推程段的开始处或在推程的中点处。
由图量得在推程的
开始处凸轮机构的压力角最大,此时
<[
]=30°。
图3-15题3-4解图
3-5解:
(1)计算从动件的位移并对凸轮转角求导
当凸轮转角
在0≤
≤
过程中,从动件按简谐运动规律上升h=30mm。
根据教材(3-7)式可
得:
0≤
≤
0≤
≤
当凸轮转角
在
≤
≤
过程中,从动件远休。
S2=50
≤
≤
≤
≤
当凸轮转角
在
≤
≤
过程中,从动件按等加速度运动规律下降到升程的一半。
根据
教材(3-5)式可得:
≤
≤
≤
≤
当凸轮转角
在
≤
≤
过程中,从动件按等减速度运动规律下降到起始位置。
根
据教材(3-6)式可得:
≤
≤
≤
≤
当凸轮转角
在
≤
≤
过程中,从动件近休。
S2=50
≤
≤
≤
≤
(2)计算凸轮的理论轮廓和实际轮廓
本题的计算简图及坐标系如图3-16所示,由图可知,凸轮理论轮廓上B点(即滚子中心)的直角坐标
为
图3-16
式中
。
由图3-16可知,凸轮实际轮廓的方程即B′点的坐标方程式为
因为
所以
故
由上述公式可得理论轮廓曲线和实际轮廓的直角坐标,计算结果如下表,凸轮廓线如图3-17所
示。
x′
y′
x′
y′
0°
49.301
8.333
180°
-79.223
-8.885
10°
47.421
16.843
190°
-76.070
-22.421
20°
44.668
25.185
200°
-69.858
-34.840
30°
40.943
33.381
210°
-60.965
-45.369
40°
36.089
41.370
220°
-49.964
-53.356
50°
29.934
48.985
230°
-37.588
-58.312
60°
22.347
55.943
240°
-24.684
-59.949
70°
13.284
61.868
250°
-12.409
-59.002
80°
2.829
66.326
260°
-1.394
-56.566
90°
-8.778
68.871
270°
8.392
-53.041
100°
-21.139
69.110
280°
17.074
-48.740
110°
-33.714
66.760
290°
24.833
-43.870
120°
-45.862
61.695
300°
31.867
-38.529
130°
-56.895
53.985
310°
38.074
-32.410
140°
-66.151
43.904
320°
43.123
-25.306
150°
-73.052
31.917
330°
46.862
-17.433
160°
-77.484
18.746
340°
49.178
-9.031
170°
-79.562
5.007
350°
49.999
-0.354
180°
-79.223
-8.885
360°
49.301
8.333
图3-17题3-5解图
3-6解:
图3-18题3-6图
从动件在推程及回程段运动规律的角位移方程为:
1.推程:
0°≤
≤150°
2.回程:
0°≤
≤120°
计算各分点的位移值如下:
总转角(°)
0
15
30
45
60
75
90
105
角位移(°)
0
0.367
1.432
3.092
5.182
7.5
9.818
11.908
总转角(°)
120
135
150
165
180
195
210
225
角位移(°)
13.568
14.633
15
15
15
14.429
12.803
0.370
总转角(°)
240
255
270
285
300
315
330
345
角位移(°)
7.5
4.630
2.197
0.571
0
0
0
0
根据上表作图如下:
图3-19题3-6解图
3-7解:
从动件在推程及回程段运动规律的位移方程为:
1.推程:
0°≤
≤120°
2.回程:
0°≤
≤120°
计算各分点的位移值如下:
总转角(°)
0
15
30
45
60
75
90
105
位移(mm)
0
0.761
2.929
6.173
10
13.827
17.071
19.239
总转角(°)
120
135
150
165
180
195
210
225
位移(mm)
20
20
20
19.239
17.071
13.827
10
6.173
总转角(°)
240
255
270
285
300
315
330
345
位移(mm)
2.929
0.761
0
0
0
0
0
0
图3-20题3-7解图
4.5课后习题详解
4-1解 分度圆直径
齿顶高
齿根高
顶隙
中心距
齿顶圆直径
齿根圆直径
基圆直径
齿距
齿厚、齿槽宽
4-2解由
可得模数
分度圆直径
4-3解由
得
4-4解 分度圆半径
分度圆上渐开线齿廓的曲率半径
分度圆上渐开线齿廓的压力角
基圆半径
基圆上渐开线齿廓的曲率半径为0;
压力角为
。
齿顶圆半径
齿顶圆上渐开线齿廓的曲率半径
齿顶圆上渐开线齿廓的压力角
4-5解 正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:
基圆直径
假定
则解
得
故当齿数
时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数
,基圆小于
齿根圆。
4-6解 中心距
内齿轮分度圆直径
内齿轮齿顶圆直径
内齿轮齿根圆直径
4-7证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点
正好在刀具
的顶线上。
此时有关系:
正常齿制标准齿轮
、
,代入上式
短齿制标准齿轮
、
,代入上式
图4.7题4-7解图
4-8证明如图所示,
、
两点为卡脚与渐开线齿廓的切点,则线段
即为渐开线的法线。
根据渐
开线的特性:
渐开线的法线必与基圆相切,切点为
。
再根据渐开线的特性:
发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:
AC
对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。
图4.8题4-8图 图4.9题4-8解图
4-9解模数相等、压力角相等的两个齿轮,分度圆齿厚
相等。
但是齿数多的齿轮分度圆直径
大,所以基圆直径就大。
根据渐开线的性质,渐开线的形状取决于基圆的大小,基圆小,则渐开线曲率
大,基圆大,则渐开线越趋于平直。
因此,齿数多的齿轮与齿数少的齿轮相比,齿顶圆齿厚和齿根圆齿
厚均为大值。
4-10解切制变位齿轮与切制标准齿轮用同一把刀具,只是刀具的位置不同。
因此,它们的模数、压
力角、齿距均分别与刀具相同,从而变位齿轮与标准齿轮的分度圆直径和基圆直径也相同。
故参数
、
、
、
不变。
变位齿轮分度圆不变,但正变位齿轮的齿顶圆和齿根圆增大,且齿厚增大、齿槽宽变窄。
因此
、
、
变大,
变小。
啮合角
与节圆直径
是一对齿轮啮合传动的范畴。
4-11解 因
螺旋角
端面模数
端面压力角
当量齿数
分度圆直径
齿顶圆直径
齿根圆直径
4-12解
(1)若采用标准直齿圆柱齿轮,则标准中心距应
说明采用标准直齿圆柱齿轮传动时,实际中心距大于标准中心距,齿轮传动有齿侧间隙,传动不
连续、传动精度低,产生振动和噪声。
(2)采用标准斜齿圆柱齿轮传动时,因
螺旋角
分度圆直径
节圆与分度圆重合
,
4-13解
4-14解 分度圆锥角
分度圆直径
齿顶圆直径
齿根圆直径
外锥距
齿顶角、齿根角
顶锥角
根锥角
当量齿数
4-15答:
一对直齿圆柱齿轮正确啮合的条件是:
两齿轮的模数和压力角必须分别相等,即
、
。
一对斜齿圆柱齿轮正确啮合的条件是:
两齿轮的模数和压力角分别相等,螺旋角大小相等、方向
相反(外啮合),即
、
、
。
一对直齿圆锥齿轮正确啮合的条件是:
两齿轮的大端模数和压力角分别相等,即
、
。
5-1解:
蜗轮2和蜗轮3的转向如图粗箭头所示,即
和
。
图5.5 图5.6
5-2解:
这是一个定轴轮系,依题意有:
齿条6的线速度和齿轮5′分度圆上的线速度相等;而齿轮5′的转速和齿轮5的转速相等,因
此有:
通过箭头法判断得到齿轮5′的转向顺时针,齿条6方向水平向右。
5-3解:
秒针到分针的传递路线为:
6→5→4→3,齿轮3上带着分针,齿轮6上带着秒针,因此有:
。
分针到时针的传递路线为:
9→10→11→12,齿轮9上带着分针,齿轮12上带着时针,因此有:
。
图5.7 图5.8
5-4解:
从图上分析这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2为行星轮,构件
为行星
架。
则有:
∵
∴
∴
当手柄转过
,即
时,转盘转过的角度
,方向与手柄方向相同。
5-5解:
这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,构件
为行星架。
则有:
∵
,
∴
∴
传动比
为10,构件
与
的转向相同。
图5.9 图5.10
5-6解:
这是一个周转轮系,其中齿轮1为中心轮,齿轮2为行星轮,构件
为行星架。
则有:
∵
,
,
∵
∴
∴
5-7解:
这是由四组完全一样的周转轮系组成的轮系,因此只需要计算一组即可。
取其中一组作分
析,齿轮4、3为中心轮,齿轮2为行星轮,构件1为行星架。
这里行星轮2是惰轮,因此它的齿数
与传动比大小无关,可以自由选取。
(1)
由图知
(2)
又挖叉固定在齿轮上,要使其始终保持一定的方向应有:
(3)
联立
(1)、
(2)、(3)式得:
图5.11 图5.12
5-8解:
这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,
为行星架。
∵
,
∴
∴
与
方向相同
5-9解:
这是一个周转轮系,其中齿轮1、3为中心轮,齿轮2、2′为行星轮,
为行星架。
∵设齿轮1方向为正,则


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机械设计基本 机械设计 基本 课后 完全 精美 答案 解析 有了 绝对 不用
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《酒店人力资源管理》教案.docx
《酒店人力资源管理》教案.docx
-
《马克思主义基本原理概论》选择题复习题.docx
-
《全国100所名校示范卷》高三生物人教版西部卷一轮复习 第十五单元 《稳态与环境》综合检测.docx
-
《1吨有多重》教学设计反思及评点2篇.docx
-
《红飘带狮王》读书笔记.docx
-
《教综》真题答案.docx
-
《企业管理》复习题发学生.docx
-
《提高数学学困生的学习兴趣研究》课题工作总结报告.docx
-
《蟋蟀的住宅》的教学设计.docx
-
《园林建筑设计》教案.docx
-
《中西医结合内科学》精华笔记.docx
-
2三轴向加速度传感器长春汽车工业高等专科学校.docx
-
04装修工程施工合同.docx
-
5套打包四年级数学上期中考试单元综合练习题含答案解析.docx
-
《食品安全法》知识竞赛题目及答案.docx
-
《24式简化太极拳》简案.docx
-
《金融理论与实务》复习大纲.docx
-
《旅游地理》学案.docx
-
《企业集团财务管理》综合练习题参考答案11春.docx
-
《实践论》原文毛泽东.docx
-
《项目管理软件》课程复习题.docx
-
《员工手册》电子版范文.docx
-
《中小学布局整改措施》.docx
-
5旋风分离器安装.docx
-
10kV跨越架搭设施工方案设计.docx
-
#市关爱儿童服务中心暨救助站改造工程项目建议书.docx
-
《毛概》课程标准.docx
-
《人民日报》学习贯彻党的十七届四中全会精神系列.docx
-
《我的军训生活》作文800字.docx
-
《研发人员绩效考核奖励办法》.docx
-
1 《道路交通安全法》规定任何单位或者个人不得收缴机.docx
-
02电气检修规程.docx
-
语文人教版五年级下册将相和.docx
-
《秋天果子多》中班教案.docx
-
畅谈理想绽放青春演讲稿3分钟.docx
-
中小学运动会口号解说词和致辞集锦.docx
-
肇庆中考方案.docx
-
《中医正骨》脱位试题.docx
-
超声诊断学2分析.docx
-
中职学生学期个人总结5篇.docx
-
迎校园元旦节广播稿5篇.docx
-
幼儿园管理员工作总结.docx
-
1简述公共政策的基本特征.docx
-
专题22 步入近代资本主义制度的初步确立第01期中考历史真题分类训练学生版.docx
-
成本会计练习题及答案.docx
-
祝自己宝宝满月的祝福语.docx
-
优秀合同协议范文深圳市劳动合同3篇.docx
-
幼儿园中班建构教案.docx
-
14第十四章职业安全卫生.docx
-
专业名称及代码04.docx
-
专题范文精编考勤制度范本.docx
