 实验指导书实验六SolidWorks运动仿真.docx
实验指导书实验六SolidWorks运动仿真.docx
- 文档编号:28522928
- 上传时间:2023-07-18
- 格式:DOCX
- 页数:21
- 大小:1.82MB
实验指导书实验六SolidWorks运动仿真.docx
《实验指导书实验六SolidWorks运动仿真.docx》由会员分享,可在线阅读,更多相关《实验指导书实验六SolidWorks运动仿真.docx(21页珍藏版)》请在冰豆网上搜索。
实验指导书实验六SolidWorks运动仿真
实验一SolidWorks运动仿真
一、实验目的
1.掌握SolidWorks图形装配方法
2.掌握SolidWorks装配图的motion分析操作方法
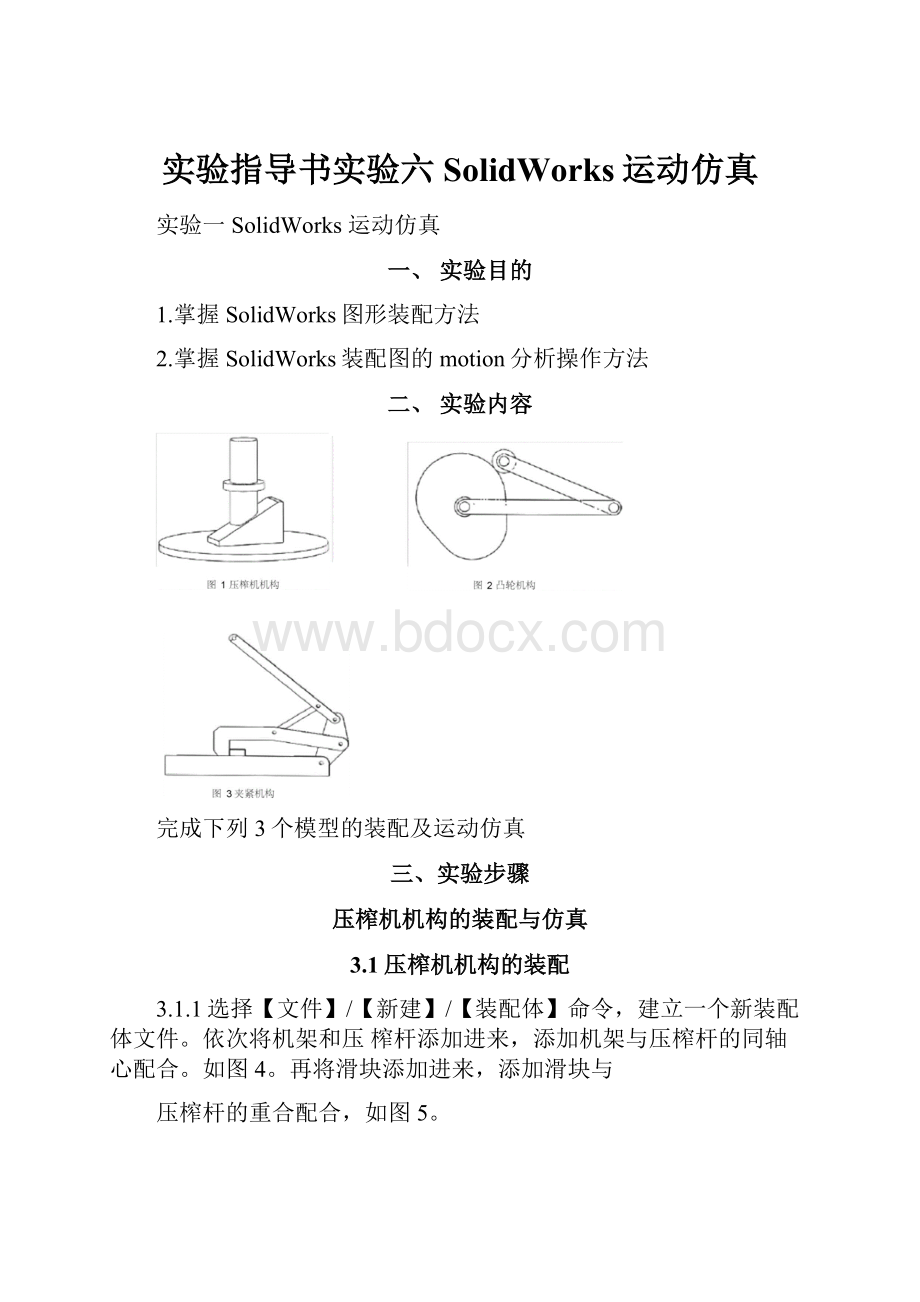
二、实验内容
完成下列3个模型的装配及运动仿真
三、实验步骤
压榨机机构的装配与仿真
3.1压榨机机构的装配
3.1.1选择【文件】/【新建】/【装配体】命令,建立一个新装配体文件。
依次将机架和压榨杆添加进来,添加机架与压榨杆的同轴心配合。
如图4。
再将滑块添加进来,添加滑块与
压榨杆的重合配合,如图5。
3.1.2添加滑块端面与机架端面的重合配合,以及滑块前视基准面与机架前视基准面的重合配合(点击图形区域左边的装配体下的机架前的“+”号即可找到前视基准面)最后将滑块
拖动到中间位置。
3-iHlOry
押甘
W0»W1
Eg
#令“确F帛":
■去1寸
忡如12附旳
("3SHiiW呼生吊B話
〜”排创Ml劭1=flfl■TiBi;
7'<^±flcsra
加«istt-
>HOfficeI”iPyUCIf、L=■笑浄击]=.]
严幻Mijbopy
'也树1弋
忖却
-f?
Mjriu封哇A
录-■'
.1/-
图7机架与滑块前视基准面的重合配合
3.2压榨机机构的运动仿真
3.2.1仿真前先将“solidworksmotion选择其中的“插件”,在弹出的“插件”
如下图8所示。
在装配体界面,单击左下角的【运动算例】,再在【算例类型】下拉列表中选择【motion分析】如下图9所示。
”插件载入,单击工具栏中按钮“I冒的下三角形,设置框中,选中“solidworksmotion”的前后框,
1日动II*
PftvJl垃遥ftsi灵J琢「糠柞r
IP'hf
Ffnturi'V^orU
Pn牛few电w丐fiO
^olidWflrifsPffiqnrt-r中IkdWpF宣百Mok
SoiiCWflrtjRoudno
Sali-dW-diFb*!
Elmlullat■an
SalPdW<]iToulUqp
54Ii4WqfIcs
utilIN沾
U^grK口rgi^PPCM
TDlAnal^tt
r
r
I'11
r'
n
n
III
□
□
旦SalrdWorks「「半
口iLit-ntrnfc
1孑3乜门|胡3*^存卄百LH"ik¥^.LL砂
□
|」1|
图8载入插件
322添加实体接触:
单击工具栏上的栏内选择“实体接触”,在【选择】栏内,择“steel(dry)”,单击“确定”按钮“体接触,参数设置与压榨杆与滑块之间的一样。
动画
5X酬
®祝向及榕机
U1应冶恥i*最逼真的模拟,再諏席逸矩1住果.
国怨(固定J机架W(钛认"默认&嚅㈢压榨干dA畑“赵A国想㈢滑块專认"默认A上
S-0®配合
FOirrwi■理现饥皑*1・|
图9motin分析
空,在弹出的属性管理器中【接触类型】
“接触按钮”
点击视图区中压榨杆和滑块,“材料”栏内都选芻鬥”,如下图10所示。
同理再为滑块与机架添加实
%
&X3
T■■rI二*・=■r-rf•■■--1
用Kia:
僮.娶惇改逵些!
S性揑丫刀珥]^匪
IWMWH
1卅曲注U
*
费艇暫泪?
7;1
回超斜佃
Sh|5t«lOft)
★
z
MKEt
叫
1\
•MM.1.'j-
1
3.2.3添加驱动力:
物体对压榨杆的反作用力即为驱动力,故在压榨杆上添加一恒力即可。
单击工具栏中的“力”按钮“耳”,在弹出的【力/扭矩】属性管理器中,【类型】选择“力”,口,选择压榨杆上表面,单击50牛顿,单击确定按钮。
【方向】选择“只有作用力”,“作用零件和作用应用点”"改变力的方向向下,【力函数】选择“常量”,大小输入
卜殳力/扭矩
予]Zj(na力矩E
I
n兵启作用力沪JI
作用力电辰惟用丈?
低
「口
对于此的刀:
a暮SE挥
所3兰导琳
帛垦
Fl50半帧
fit
Ir*"
图11添加驱动力
3.2.4仿真:
将播放速度设置为5秒,右击“键码属性”,选择“编辑关键点时间”,输入
0.05确定。
如下图12所示。
然后选择工具栏中的“运动算例属性”按钮目,在弹出的【运
动算例属性】管理器中,将motion分析下的每秒帧数改为1000并单击确定。
如图13所示。
5&
111:
'
=暮
图12关键点时间的设置
雌(
1运动算例属性’
¥X
1勤画
诵1
*
1基•島运动
M分折
*
毎和删
门1」J-j.jAl-t1 □朝矗管普變冗杀配舍 图13帧数的更改 3.2.5最后在工具栏中选择“计算”按钮sa,待计算完成后,点击“结果和图解”按钮 选取类别为“位移/速度/加速度”,选取子类别为“质量中心位置”,选取结果分量为“ 图所示。 凸轮机构的装配与仿真 3.3凸轮机构的装配 3.3.1选择【文件】/【新建】/【装配体】命令,建立一个新装配体文件。 依次将机架和摆 杆添加进来,添加摆杆和机架的同轴心配合,如图16所示。 其端面添加重合配合,如图17 333将凸轮添加进来,依次添加凸轮与机架的同轴心配合,重合配合,如下图所示。 3.3.4为使滚子处于正确的装配位置,将凸轮与滚子柱面添加相切配合,如图22所示。 在设 计树中右击该相切配合,在弹出的菜单中选择“压缩”,使该相切暂时不起作用,以免影响 领I刚2)一 也除CD 徹[5矯刘映回覆怪”to 配苣詩迁iTi 3.4凸轮机构的运动仿真 3.4.1仿真前先将“solidworksmotion”插件载入,单击工具栏中按钮“亘-”的下三角形, 选择其中的“插件”,在弹出的“插件”设置框中,选中“solidworksmotion”的前后框,如下图24所示。 在装配体界面,单击左下角的【运动算例】,再在【算例类型】下拉列表中选择【motion分析】如下图25所示。 旦E&HdWnrk? 夬E性 口皑屮Emw口 IVlr-nk>wh-rh-l/ll■ 1—辰—1fl—丽—I虫 图24载入插件 图25motin分析 342添加马达: 单击工具栏中“马达”按钮翔,在弹出的马达菜单中,“马达类型”选择 旋转马达,“零部件方向”中马达位置0,选择模型中凸轮的基圆边线。 在“运动”中选 择等速,72RPM。 凸轮参数以及位置如下图所示。 3.4.3将时间长度中的键码属性拖动到一秒,如图28所示。 然后选择工具栏中的“运动算例 属性”按钮目,在弹出的【运动算例属性】管理器中,将motion分析下的每秒帧数改为 100并单击确定。 如图29所示。 1运动算洌屋牲 >1 WX 密1 4 Motion分祈 A r 山」川上aTinrl Ml訂 IJ匸LJ丄i*J: fZ柱模眾g遂中动两 「“產善普按冗杀国,含 图29帧数的更改 图28关键点时间的设置 344添加实体接触与引力: 单击工具栏上的“接触按钮”萃-’,在弹出的属性管理器中【接 触类型】栏内选择“实体接触”,在【选择】栏内,点击视图区中凸轮和滚子,“材料”栏内都选择“steel(dry)”,单击“确定”按钮,如下图30所示。 再单击工具栏上的“引力”按钮,为,在弹出的【引力参数】栏内选择丫轴的负方向作为参考方向,数值为默认值, 图30添加实体接触 单击确定。 如图31所示。 图31添加引力 选取类别为“位移/速度/加速度”,选取子类别为“角位移”,选取结果分量为“幅值”,其中口右侧显示栏选择摆杆的任意一表面,单击确定。 如图32所示。 同理可得Z分量的角 加速度图形。 如图35所示。 第果 3.5夹紧机构的装配 夹紧机构的装配与仿真 3.5.1选择【文件】/【新建】/【装配体】命令,建立一个新装配体文件。 依次将机架和杻板添加进来,添加机架与杻板的同轴心配合,如图所示。 3.5.2将手柄添加进来,添加手柄与杻板的同轴心及端面配合。 如下图所示。 3.5.3将支架添加进来,添加支架与手柄的同轴心配合及重合配合,如下图所示。 如图42所示。 再添加钩头与杻板的 3.5.4将钩头添加进来,添加钩头与支架的同轴心配合, 同轴心及重合配合,如图43与图44所示。 最后添加钩头底面与机架上表面的重合配合。 图45所示。 3.5.5为了仿真的顺利进行,右击机架与钩头的重合配合,选择压缩按钮1S,将此配合先压 缩。 同理再将钩头与工件的重合配合压缩。 压缩后的配合显示为灰色。 如下图所示。 '「upB_ru '◎同心i(in課ca.栢板d; ◎同心2(tE板dr手/畫合2(杞板 : ◎同心3(手柄hIa,袁架 Z(琛4片支架d, ◎同心4(杞扳Ja精头 /重音4{祀梅<1巴钩头小「◎同心5屋絮=dA・钩头吨1;'■-垄仝二I和A\老匚于: /暹部仲件4 —羣曰7百土—■=一乍、」厶垂合呂010笨£1=・工件 图47压缩结果 图46压缩钩头与机架的重合配合 3.6夹紧机构的运动仿真 3.6.1仿真前先将“solidworksmotion”插件载入,单击工具栏中按钮“Q”的下三角形,选择其中的“插件”,在弹出的“插件”设置框中,选中“solidworksmotion”的前后框,如下图48所示。 在装配体界面,单击左下角的【运动算例】,再在【算例类型】下拉列表中选择【motion分析】如下图49所示。 图48载入插件 图49motin分析 3.6.2添加压力: 单击工具栏中的“力”按钮“ 【类型】选择“力”,【方向】选择“只有作用力”择手柄端部分割线,单击改变力的方向向下。 激活,然后选择手柄。 【力函数】选择“常量”,大小输入图所示。 3.6.3将播放速度设置为5秒,右击“键码属性”,选择“编辑关键点时间”,输入定。 如下图52所示。 然后选择工具栏中的“运动算例属性”按钮属性】管理器中,将motion分析下的每秒帧数改为 0.03确目,在弹出的【运动算例 1000并单击确定。 如图53所示。 图52关键点时间的设置 图53帧数的更改 磁'在弹出的属性管理器中【接触类型】 1中用鼠 3.6.4添加实体接触: 单击工具栏上的“接触按钮” 栏内选择“实体接触”,在【选择】栏内,选中“使用接触组”复选框,零部件组 标在视图区选中钩头,零部件组2中选择机架与工件。 “材料”栏内都选择“steel(dry)”,单 击“确定”按钮“扌”,如下图54所示。 图54钩头与工件以及机架接触参数设置 365添加弹簧: 单击工具栏上的弹簧按钮1岂1,在弹出的属性管理器中【弹簧类型】选择“线性弹簧”,在【弹簧参数】栏内,“弹簧端点”选择视图区中工件的边线与机架倒圆处边线, “弹簧常数”输入100牛顿/mm,单击确定,如下图所示。 图55工件与机架弹簧参数设置 366最后在工具栏中选择“计算”按钮葩,待计算完成后,点击“结果和图解”按钮'O,选取类别为“力”,选取子类别为“反作用力”,选取结果分量为“幅值”,其中 图56弹簧参数设置 单击确定,生成弹簧反作用力幅值曲线图。 如图57所示。 图57弹簧反作用力图解 它U)亠*K世眩


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 实验 指导书 SolidWorks 运动 仿真
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 #2机组现场施工用电布置措施.docx
#2机组现场施工用电布置措施.docx
-
《个人贵金属质押借款合同》兴业银行.docx
-
《科学发展观和小康社会的经济建设》复习导学案.docx
-
《我和祖父的园子》第一课时教案两篇word.docx
-
《质量》教学案例与设计.docx
-
2惠农小册子.docx
-
7A版个人与团队模拟考试题及答案.docx
-
10篇新部编四年级下册语文课内外阅读理解专项练习题及答案.docx
-
16初四物理热和能知识点总结精讲.docx
-
20XX社会语言经典语录流行风暴.docx
-
48篇教学案例分析报告题.docx
-
《电子工厂安全管理制度汇总》.docx
-
《机械制造课程设计》指导.docx
-
《钱学森》教案第二课时.docx
-
《边城》读后感5篇.docx
-
《固定式压力容器安全技术监察规程》.docx
-
《论雷峰塔的倒掉》.docx
-
《手术台就是阵地》教学设计三年级语文下册.docx
-
《夏洛的网》课外阅读教学设计.docx
-
《自己的花是让别人看的》教案.docx
-
3C检查表090429.docx
-
7客运专线CRTSⅡ型板式无砟轨道施工工法.docx
-
《笔算除法》课时教案设计.docx
-
11#楼高大模板支撑体系专项方案.docx
-
17科学分析经济形势.docx
-
《电流和电路》易错题精讲综合检测题与答案.docx
-
《会计信息系统》习题含答案.docx
-
《汽车电器设备与维修》发电机分教考分离试题及标准答案.docx
-
《四川省排污许可证管理暂行办法》.docx
-
《新编实用英语》教案第一册Unit.docx
-
0母版锅炉值班员计算题WORD版.docx
-
3年级下册英语单词记忆人教版.docx
-
工艺质量管理制度11年版.docx
-
高新技术企业领域分类版.docx
-
高中生物必修一第二章组成细胞的分子.docx
-
公安专业科目综合知识.docx
-
高中地理 12 自然灾害的类型与分布教案 湘教版选修5.docx
-
高一历史知识点总结大全.docx
-
公务员转正个人总结大全.docx
-
高中数学必修1《方程的根与函数的零点》教案.docx
-
高中英语 配套测评卷 新人教必修2二.docx
-
高中理综高三模拟唐山市度高三年级第三次模拟考试理科综合扫描版.docx
-
供热系统按户计量技术开发及设备研制.docx
-
个人年终总结范文.docx
-
个人与团队管理课程重难点分析与练习DOC.docx
-
古诗文重点篇目理解性默写.docx
-
高中语文课文素材运用.docx
-
高中地理东南亚综合题.docx
-
个人工作总结大全.docx
-
锆珠项目可行性研究报告.docx
-
固废.docx
