 水温控制系统.docx
水温控制系统.docx
- 文档编号:9156913
- 上传时间:2023-02-03
- 格式:DOCX
- 页数:20
- 大小:99.24KB
水温控制系统.docx
《水温控制系统.docx》由会员分享,可在线阅读,更多相关《水温控制系统.docx(20页珍藏版)》请在冰豆网上搜索。
水温控制系统
水温控制系统
设计报告
1.设计原理
水温控制系统以STC89C52单片机作为控制核心,采用开关控制和PID控制算法相结合,通过控制单位时间内加热时间所占的比例(即控制波形占空比)来控制水的加热速度,实现对1L水的全量程(10℃――70℃)内的升温、降温功能的自动控制。
根据设计要求系统可划分为控制模块、温度测量模块、水温调节模块、键盘输入模块、显示电路模块等。
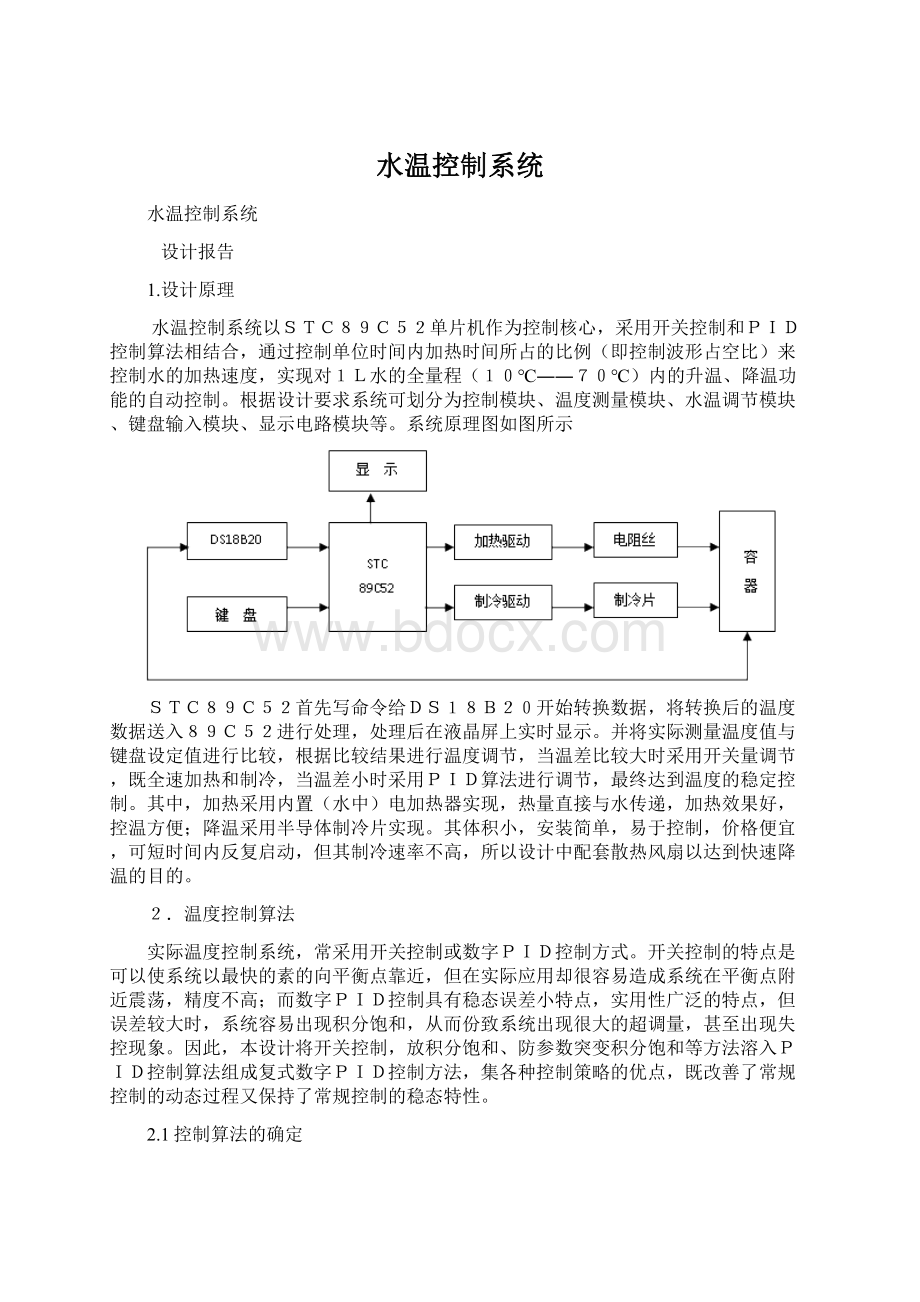
系统原理图如图所示
STC89C52首先写命令给DS18B20开始转换数据,将转换后的温度数据送入89C52进行处理,处理后在液晶屏上实时显示。
并将实际测量温度值与键盘设定值进行比较,根据比较结果进行温度调节,当温差比较大时采用开关量调节,既全速加热和制冷,当温差小时采用PID算法进行调节,最终达到温度的稳定控制。
其中,加热采用内置(水中)电加热器实现,热量直接与水传递,加热效果好,控温方便;降温采用半导体制冷片实现。
其体积小,安装简单,易于控制,价格便宜,可短时间内反复启动,但其制冷速率不高,所以设计中配套散热风扇以达到快速降温的目的。
2.温度控制算法
实际温度控制系统,常采用开关控制或数字PID控制方式。
开关控制的特点是可以使系统以最快的素的向平衡点靠近,但在实际应用却很容易造成系统在平衡点附近震荡,精度不高;而数字PID控制具有稳态误差小特点,实用性广泛的特点,但误差较大时,系统容易出现积分饱和,从而份致系统出现很大的超调量,甚至出现失控现象。
因此,本设计将开关控制,放积分饱和、防参数突变积分饱和等方法溶入PID控制算法组成复式数字PID控制方法,集各种控制策略的优点,既改善了常规控制的动态过程又保持了常规控制的稳态特性。
2.1控制算法的确定
温度控制过程为:
当水温温差大时,采用开关控制方式迅速减小温差,以缩短调节时间;当温差小于某一值后采用PID控制方式,以使系统快速稳定并保持系统无静态误差。
在这种控制方法中,PID控制在较小温差时开始进入,这样可有效避免数字积分器的饱和。
PID参数和被控制对象关系密切,要精确得到被控对象模型比较困难,为此,采用离线模糊整定的方法来确定PID参数,即给出一组PID参数的初值,测得相应的数据,按使这个量减小的方向调节PID参数,用整定后的参数控制该系统,并根据输出的调节时间、超调量及稳态误差,调节PID参数,如此反复,求得一组使系统性能最优的PID参数。
复合PID控制系统方框图如图所示。
2.2PID控制算法
根据设计要求,系统对1L净水进行加热或降温处理,根据水的对象特性,会出现惯性温度误差问题,原因如下:
温度控制器采用发热丝对水进行加热。
发热丝通电加热时,内部温度很高。
当容器内水温升高至设定温度时,温度控制器发出信号停止加热。
但这时发热丝的温度会高于设定温度,发热丝还将继续对对水进行加热,导致水的温度还会继续上升几度,然后才开始下降。
当水温下降到设定温度的下限时,温度控制器又发出加热信号,开始加热,但发热丝要把温度传递到被加热器件需要一定的时间,导致水温会继续下降几度。
所以,为了对水温实现精确控制,使温度测量误差在±0.5℃内,必须采用PID模糊控制算法,通过Pvar、Ivar、Dvar(比例、积分、微分)三方面的结合形成一个模糊控制来解决惯性温度误差问题。
利用数值逼近方法,在采样时刻t=iT(T为采样周期,i为正整数)时,PID调节规律可通过下式近似计算。
则增量式PID算法的输出量为:
式中,ei、ei-1、ei-2分别为第n次、n-1次和n-2次的偏差值,Kp、Ti、Td分别为比例系数、积分系数和微分系数,T为采样周期。
单片机每隔固定时间T将现场温度与用户设定目标温度的差值带入增量式PID算法公式,由公式输出量决定PWM方波的占空比,后续加热电路根据此PWM方波的占空比决定加热功率。
现场温度与目标温度的偏差大则占空比大,加热电路加热功率增大,使温度的实测值与设定值的偏差迅速减少;反之,二者的偏差小则占空比减小,加热电路加热功率减少,直至目标值与实测值相等,达到自动控制的目的。
2.3PID参数的确定
PID参数的选择是设计成败的关键,它决定了温度控制的准确度。
由于温度系统是一个具有较大滞后性的系统,所以本系统的采样周期定为10秒,加热周期定为1秒钟,根据一些文献提供的经验值,初步确定Kp=2,Ti=2,Td=0.5,根据公式Ki=Kp*T/TI;Kd=Kp*TD/T;计算得出Ki=1,Kd=1;然后,由按键对系统设定一个温度值,在线应用工程整定法中的经验法对P,I,D各参数进行调整,经验法是一种凑试法,它通过模拟或闭环运行,观察调节过程的响应曲线,如果曲线不够理想,则按某种程序将参数反复凑试,直到调节质量满意为止。
凑试程序通常是先比例后积分,最后加入微分。
凑试法整定PID参数的步骤是:
1)首先进行P整定。
将参数Kp由小而大慢慢变化,直至得到反应快,超调小的响应曲线。
若无静差或静差在允许范围内且响应曲线满意,整定结束,否则继续下步。
2)进行PI整定。
略小于Kp值,将Ti由大而小缓慢变化,在保持系统动态性能良好的前提下,消除静差或是静差允许范围内。
反复改变Kp,Ti值以求得较好效果,若效果满意,则整定结束,否则继续下去。
3)进行PID整定。
略改变Kp,Ti的值,使Td由小而大缓慢变化,以求得较好的响应曲线和较小的静差。
逐步反复的试凑,直至获得满意效果为止。
对于一定的系统,合理的参数组并不唯一,根据一些文献的实践经验,在具体实施PID参数整定时,以下几个结论比较实用:
1)比例系数Kp是PID调节中最关键的一个参数,Kp增大,系统稳定性增加,但调节灵敏度减弱,一般曲线振荡频繁时,要增大Kp,而曲线飘浮绕大弯时,要减小Kp.
2)积分时间常数Ti主要起消除静差的作用,减小Ti,消除静差快,但稳定性减小,一般曲线偏离恢复慢时,减小Ti,而曲线波动周期长时,再增大Ki。
3)微分时间常数Td是加速过程的有力调节,在加速过渡过程,应增加Td,Td不宜过小,也不宜太大,Td一般选Ti的四分之一为最佳。
根据以上调节的步骤及调节的方法及经验,经过反复的试验做后得到最终的P,I,D的参数为Kp=30,Ki=5,Kd=0.
3.硬件电路设计
水温控制系统的硬件电路主要包括:
主控电路、温度采集电路、温控电路和显示电路等,下面依次对各部分进行设计。
3.1主控电路
主控电路采用STC89C52单片机作为系统控制器,结合数字PID算法完成对温度测量信号的接收、处理,控制加热器和制冷片,使水温控制达到设计要求。
主控电路包括STC89C52最小系统和键盘电路两部分,STC89C52最小系统在上一章中已介绍,这里不再赘述。
本设计键盘采用RF-X1开发板上的6个独立按键中的4个,各按键经上拉电阻分别接到单片机的P3.2、P3.3、P3.4、P3.5口上,起到确认、选择、上调和下调的作用,每按上调或下调键一次,设定温度值加1或减1。
电路图如图所示。
3.2温度采集电路
本系统采用DS18B20单总线可编程温度传感器来实现温度的采集和转换,温度以9~12位数字量读出,可以直接与单片机进行连接,无需外部器件和电源,大大简化了电路的复杂度。
DS18B20应用广泛,测温范围为-55~+125oC,温度数字量转换快,性能可以满足题目的设计要求。
DS18B20的测温电路如图所示。
3.3温度控制电路
温度控制电路采用加热器和制冷片对1L水实现加热和降温,具体电路如图12-5所示。
当实测温度高于设定温度时,单片机P0.2脚输出低电平,光耦管导通输出高电平,进入LM393管脚比较整形,滤除高次谐波,输出高电平,进入Q3和Q4组成的推挽电路,Q3导通Q4截止,输出低电平,晶闸管导通,驱动制冷片降温。
当实测温度低于设定温度时,P0.3脚输出低电平,驱动加热器对水温进行加热,工作原理与降温驱动相同。
3.4显示电路
显示电路采用LCD12864液晶模块显示系统的设定温度和实测温度。
LCD12864液晶共有20个引脚,管脚名称及功能如表12-1所示。
本系统选用单片机P1口作为数据输出端与LCD12864的数据端(DB0~DB7)相连,进行水温数据传输;P20接串并行模式方式位RS;P21接并行的读写方式位R/W;P22接并行使能端口E;P23接并/串行接口选择位PSB;P24接复位端口RST。
具体电路图如图所示。
4.软件设计
系统的软件设计应用C语言,采用模块化对单片机进行编程实现各项功能。
主要包括:
PID控制程序、按键子程序、温度采集子程序、温度比较子程序和液晶显示程序。
4.1主程序设计
系统上电初始化后,首先进行按键扫描,若有按键按下,则读取按键值,更新设定温度。
将实测温度与设定温度进行比较,若实测温度与设定温度差值大于2ºC,则对水进行全速加热或降温;若实测温度与设定温度差值小于2ºC,则调用PID子程序,对水温进行微调,达到设计要求。
系统主程序流程图如图所示.
附录:
PID控制程序
PID控制就是按设定值与测量值之间偏差的比例、偏差的积累和偏差变化的趋势进行控制。
它根据采样时刻的偏差值计算输出控制量的增量,调节控制信号的导通时间来控制加热电路和冷却电路的工作。
当采样周期相当短时,可以用求和代替积分,用差商代替微分。
PID控制子程序如下:
/******************************PID算法**********************************/
unsignedintPIDCalc(structPID*pp,unsignedintNextPoint)
{
unsignedintdError,Error;
Error=pp->SetPoint-NextPoint;//偏差
pp->SumError+=Error;//积分
dError=pp->LastError-pp->PrevError;//当前微分
pp->PrevError=pp->LastError;
pp->LastError=Error;
return(pp->Proportion*Error//比例
+pp->Integral*pp->SumError//积分项
+pp->Derivative*dError);//微分项
}
/************************************************************************/
按键子程序
本系统采用四个按键,完成温度的设定。
当选择键K1每按下一次,K1num加1,根据K1num值选择对温度值的百位(预留)、十位、个位进行数值调节。
每按一次按键K2,对应位数值加1,每按一次按键K1,对应位数值减1,并将设定温度值写到液晶显示器的相应位置。
按键子程序如下:
/*************************按键子程序***********************************/
voidsheding()
{
if(k1==0)
{
delay1(10);
if(k1==0)//按键K1按下
while(!
k1);//按键K1抬起
write_com(0x0f);write_com(0x94);
k1num++;
switch(k1num)
{
case1:
write_com(0x0f);write_com(0x94);//液晶显示位置,十位
break;
case2:
write_com(0x95);//液晶显示位置,个位
break;
case3:
write_com(0x96);//液晶显示位置,小数位
break;
case4:
k1num=0;write_com(0x0c);//清零
break;
}
}
if(k1num!
=0)//返回
{
//温度值加处理:
if(k2==0)//按键K2按下
{
delay1(10);
if(k2==0)
{
while(!
k2);
switch(k1num)
{
case1:
shi++;if(shi==10)shi=0;a=shi;//十位加1,到10清零
write_com(0x94);write_date(table[shi]);write_com(0x94);
break;
case2:
ge++;if(ge==10)ge=0;b=ge;//个位加1,到10清零
write_com(0x95);;write_date(table[ge]);write_com(0x95);
break;
case3:
xs++;if(xs==10)xs=0;c=xs;//小数位加1,到10清零
write_com(0x96);write_date('.');write_date(table[xs]);write_com(0x96);//在液晶对应位置画点
break;
}
}
}
//温度值减处理:
if(k3==0)
{
delay1(10);
if(k3==0)
{
while(!
k3);
switch(k1num)
{
case1:
shi--;if(shi==-1)shi=9;a=shi;
write_com(0x94);write_date(table[shi]);write_com(0x94);
break;
case2:
ge--;if(ge==-1)ge=9;b=ge;
write_com(0x95);write_date(table[ge]);write_com(0x95);
break;
case3:
xs--;if(xs==-1)xs=9;c=xs;
write_com(0x96);write_date('.');write_date(table[xs]);write_com(0x96);
break;
}
}
}
}
}
/***************************************************************************/
DS18B20温度采集子程序
系统采用DS18B20对1L水的温度进行采集。
首先根据DS18B20的工作时序对其进行初始化,并对DS18B20内部寄存器读写操作进行定义。
系统工作时,单片机读取DS18B20内部寄存器的二进制数值,将其转化为十进制的真实温度值。
DS18B20温度采集子程序如下:
/*******************DS18B20温度采集子程序************************/
voidinit_DS18B20()//初始化
{
ucharx=0;
DS18B20=1;//DQ复位
delay(8);//稍做延时
DS18B20=0;//单片机将DQ拉低
delay(80);//精确延时大于480us
DS18B20=1;//拉高总线
delay(14);
x=DS18B20;//稍做延时后如果x=0则初始化成功x=1则初始化失败
delay(20);
}
ucharread_onechar()//读一个字节
{
uchari=0;
uchardate=0;
for(i=8;i>0;i--)
{
DS18B20=0;
date>>=1;//寄存器右移
DS18B20=1;
if(DS18B20)
date|=0x80;
delay(4);
}
return(date);
}
voidwrite_onechar(uchardate)//写一个字节
{
uchari=0;
for(i=8;i>0;i--)
{
DS18B20=0;
DS18B20=date&0x01;
delay(5);
DS18B20=1;
date>>=1;
}
}
uintread_temp()//读取温度
{uchara=0;
ucharb=0;
uintt=0;
floattt=0;
init_DS18B20();
write_onechar(0xcc);//跳过读序号列号的操作
write_onechar(0x44);//启动温度转换
init_DS18B20();
write_onechar(0xcc);//跳过读序号列号的操作
write_onechar(0xbe);//读取温度寄存器
a=read_onechar();//连续读两个字节数据//读低8位
b=read_onechar();//读高8位
t=b;
t<<=8;
t=t|a;//两字节合成一个整型变量。
tt=t*0.0625;//得到真实十进制温度值,因为DS18B20可以精确到0.0625度,所以读回数据的最低位代表的是0.0625度
//temper12=tt*10;
t=tt*10+0.5;//放大10倍,这样做的目的将小数点后第一位也转换为可显示数字,同时进行一个四舍五入操作。
return(t);
}
voidmanage_DS18B20()
{
uintnum;
num=read_temp();
shi=num/100;
delay(5);
ge=num%100/10;
delay(5);
xs=num%10;
delay(5);
temper=shi*10+ge+0.1*xs;}
/**************************************************************************/
温度比较子程序
系统将DS18B20采集到的实际测量温度值与键盘设定值进行比较,根据比较结果对水温进行调节。
若设置温度大于实际温度,并且温差在2度以上,则驱动加热器对水温进行全速加热;当温差在0.8到2度之间时,则停止加热,开始降温;当温差小于0.8度时,则启用PID计算,控制温差逐渐趋近设定值,最终达到稳态。
若设置温度小于实际温度,系统驱动制冷片开始全速降温。
当实际温度下降到低于设定温度时,则马上开启PID计算,控制温差逐渐趋近设定值,最终达到稳态。
/************************温度比较处理子程序****************************/
voidcompare_temper()
{
unsignedchari;
if(set_temper>temper)//是否设置的温度大于实际温度
{
if(set_temper-temper>2)//设置的温度比实际的温度是否是大于2度
{
high_time=100;//如果是,则全速加热
low_time=0;
}
else//如果是在0.8到2度范围,则开始降温
{
if(set_temper-temper>0.8)
{
high_time=0;
low_time=100;
}
else//如果温差小于0.8度,运行PID计算
{
for(i=0;i<10;i++)
{
s=read_temp();
rin=s;//ReadInput
rout=PIDCalc(&spid,rin);//PerformPIDInteration
}
if(high_time<=100)
{
high_time=(unsignedchar)(rout/1000);
}
else
{
high_time=100;
low_time=(100-high_time);
}
}
}
}
elseif(set_temper<=temper)//是否设置的温度小于实际温度
{
if(set_temper-temper<0)
{
high_time=0;
low_time=100;//全速降温
}
else//实际温度大于设定温度,马上开启PID计算
{
for(i=0;i<10;i++)
{
s=read_temp();
rin=s;//ReadInput
rout=PIDCalc(&spid,rin);//PerformPIDInteration
}
if(high_time<100)
{
high_time=(unsignedchar)(rout/10000);
}
else
{
high_time=0;
low_time=(100-high_time);
}
}
}
}
/*************************************************************************/
液晶显示程序
液晶显示器用于显示水温的实际温度和设定温度。
首先对LCD12864进行初始化,并读取控制器当前状态,判断是否准备好(空闲)。
然后向液晶模块写入指令代码,进行显示准备,将要水温以十六进制代码的形式送入液晶显示缓冲区,最后利用读显示数据指令控制液晶模块在相应位置显示水温数据。
液晶显示程序如下:
/***************************LCD12864初始化*******************************/
voidinit_lcd()
{
//lcd_psb=1;
write_com(0x34);//扩充指令集
delay1
(2);
write_com(0x30);//基本指令集
delay1
(2);
write_com(0x02);//显示归位
delay1
(2);
write_com(0x01);//清屏显示
delay1
(2);
write_com(0x0c);//显示状态开关
delay1
(2);
write_com(0x06);//显示光标移动设置
delay1
(2);
}
/**********************************写数据*********************************/
voidwrite_date(uchardate)
{
read_busy();
lcd_


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 水温 控制系统
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
广东省普通高中学业水平考试数学科考试大纲Word文档下载推荐.docx
-
计算题测试文档格式.docx
-
会计年终总结范文精选10篇Word文件下载.docx
-
基坑支护及降排水方案Word格式文档下载.docx
-
古代诗歌鉴赏一剪梅学案Word文档格式.docx
-
国标舞考级Word文件下载.docx
-
机电工程质量验收规范是什么Word文档下载推荐.docx
-
技术员工作自我评价文档格式.docx
-
交警支队车棚改造工程施工合同文档格式.docx
-
护士变更注册申请审核表与示范文本Word文档下载推荐.docx
-
最新学校新冠肺炎疫情防控应急预案Word文件下载.docx
-
GB50204钢筋规范之欧阳总创编Word格式文档下载.docx
-
《半期整改措施》Word格式.docx
-
诊断 症状学腰背痛关节痛汇总.docx
-
英美文学欣赏The Analysis of Shelleys Ode to the West Wind.docx
-
增值税营改增所得税消费税车购税测试题.docx
-
整理二级建造师管理真题.docx
-
英语三级重点高频词汇导入背单词APP使用.docx
-
浙教版学年九年级数学上册第2章测试题及答案.docx
-
证件照教学设计方案.docx
-
优品课件之《从锁国走向开国的日本》教案.docx
-
整理北京交通大学万用表组装实验报告.docx
-
质量管理计划.docx
-
有机化学鉴别.docx
-
整理照明灯饰灯具行业分类英语词汇.docx
-
濉溪县城市总体规划公示.docx
-
智能化工程质量验收记录表.docx
-
学生会纪检部工作总结.docx
-
幼儿园保教主任发言稿.docx
-
跆拳道协会工作总结.docx
-
中国茶叶店连锁市场竞争分析与竞争战略研究报告.docx
-
学宪法讲宪法主题演讲稿800字精选5篇弘扬宪法精神演讲稿5篇.docx
-
高中语文 第10课 游褒禅山记教师用书 新人教版必修2Word格式.docx
-
高中毕业生登记表样本Word文件下载.docx
-
新课程理念学校教师培训资料Word下载.docx
-
小学语文教学工作总结Word格式.docx
-
高考语文试题广东卷A卷B卷Word文档下载推荐.docx
-
高级管理岗位说明书Word格式文档下载.docx
-
高中人教版必修二U2Word格式文档下载.docx
-
个人廉洁自律述职述廉报告与个人所得税自查报告汇编文档格式.docx
-
校园订水系统设计说明Word文档格式.docx
-
新人教版三年级道德与法治下册教案第一单元我和我的同伴第2课不一样的你我他Word文档下载推荐.docx
-
高考生物 一轮复习 第3单元 细胞的物质输入和输出 单元质量检测 课标人教版必修1三维设计解析版Word格式.docx
-
高科技水产品开发项目投资可行性研究报告Word格式.docx
-
新闻记者个人工作心得体会五篇Word格式.docx
-
高中生哲理美文阅读之时文选编Word下载.docx
-
心得体会 社会实践心得体会500字Word格式.docx
-
给水中水管线试压方案Word下载.docx
-
工程项目部岗位职责Word文件下载.docx
-
虚拟现实和3D打印行业分析报告Word文件下载.docx
-
农村初中英语口语能力的培养研究课题Word文档下载推荐.docx
