 模拟交通控制灯设计Word格式文档下载.docx
模拟交通控制灯设计Word格式文档下载.docx
- 文档编号:15163656
- 上传时间:2022-10-28
- 格式:DOCX
- 页数:14
- 大小:202.35KB
模拟交通控制灯设计Word格式文档下载.docx
《模拟交通控制灯设计Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《模拟交通控制灯设计Word格式文档下载.docx(14页珍藏版)》请在冰豆网上搜索。
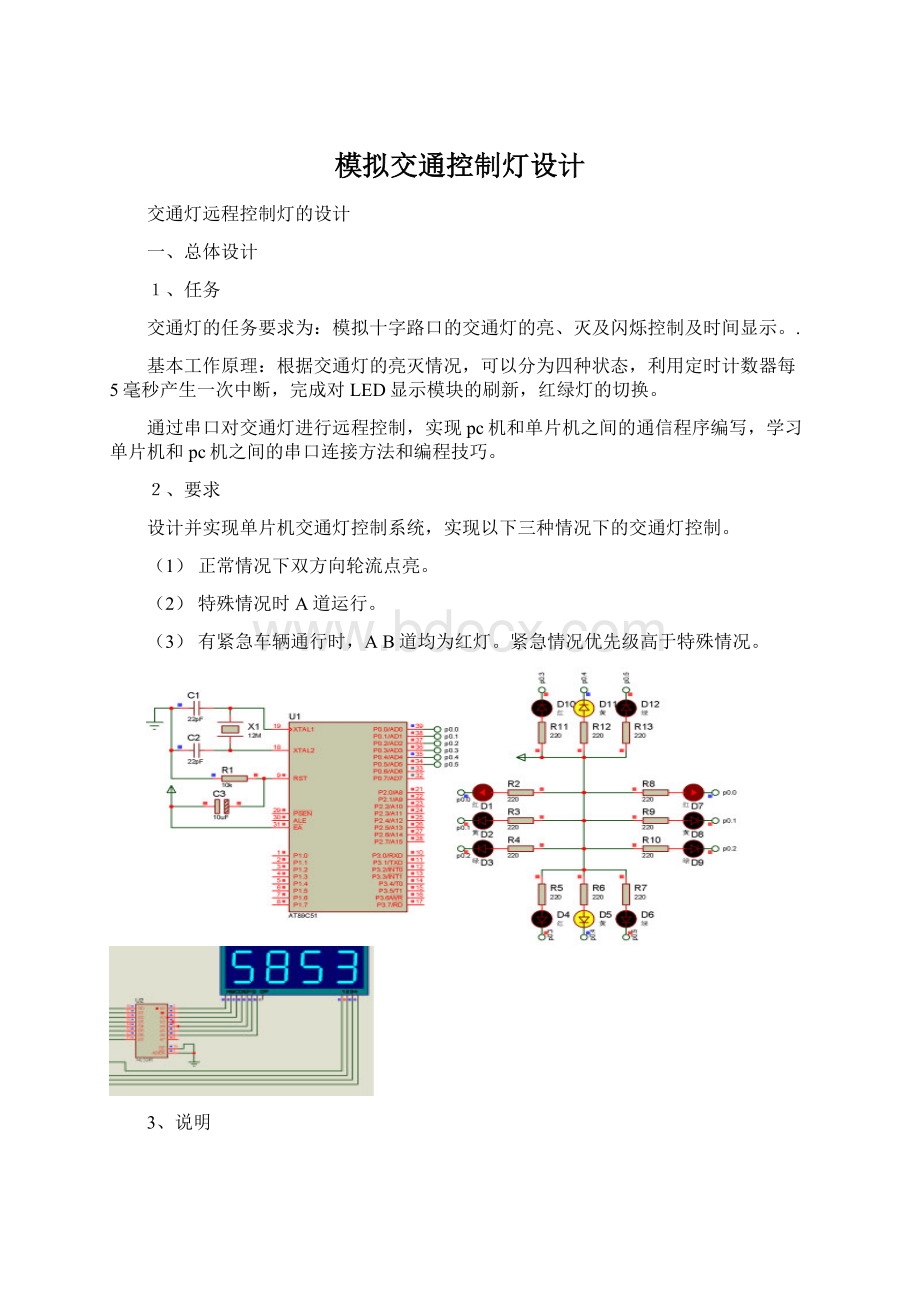
2、若不考虑左行转弯,则南北方向只用红、绿、黄3只灯控制,东西方向也只用红、绿、黄3只灯控制,即共用6只灯。
不必对单片机的I/O口进行扩展。
3、4个共阳极数码管自右至左以两位数的形式显示秒数。
为了保证数码管的亮度,必须保证输入电流的大小,因此,选用PNP型三极管作为位驱动放大器。
如下图:
分析可知,三极管相当于反向器,数码管位选低电平有效。
4、按键模拟紧急情况和特殊情况的发生,当s1、s2为高电平时(不按按键时)表示正常情况,当s1为低电平时表示紧急情况,s1信号接至INT0*引脚,s2为低电平时表示特殊情况,s2信号接至INT1*引脚(若为矩阵式键盘,可采用扫描方式识别按键)。
三、软件设计
1、根据图表可以画出各个函数流程图
P1.5
P1.4
P1.3
P1.2
P1.1
P1.0
P1端口数据
状态说明
A红灯
A黄灯
A绿灯
B红灯
B黄灯
B绿灯
F3
1
状态1:
A通行,B禁止
0,1交替变换
EB
状态2:
A绿灯闪,B禁止
状态3:
A警告,B禁止
DE
状态4:
A禁,B通
状态5:
A禁,B闪
DD
状态6:
A禁,B警告
2、函数流程图
四、硬件电路图
五、源程序
#include<
reg51.h>
#defineucharunsignedchar
#defineuintunsignedint
ucharled[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
ucharDispX[]={0xfb,0xf3,0xfb,0xeb,0xde,0xdf,0xde,0xdd};
voidAFangXing(void);
//函数声明
voidShanShuo(uchar*PTR);
voidJingGao(uchar*PTR);
voidBFangXing(void);
voiddelay_5ms(void)//5ms定时
{
uchari;
for(i=0;
i<
5;
i++)//T0方式1,定时1毫秒,循环5次即实现5毫秒定时
TH0=0xfc;
TL0=0x18;
TR0=1;
//T/C0开始工作
while(!
TF0);
TF0=0;
}
voidint_0()interrupt0
uinti,x,y,l,m;
EA=0;
//关中断
i=P1;
l=TH1;
m=TL1;
EA=1;
P1=0xdb;
for(x=10;
x>
0;
x--){
for(y=100;
y>
y--){
P2=0xf5;
P0=led[x%10];
delay_5ms();
P2=0xfa;
P0=led[x/10];
//紧急情况倒计时
EA=0;
P1=i;
TH1=l;
TL1=m;
EA=1;
voidint_1()interrupt2//特殊情况中断
{
uinti,l,m,x,y;
i=P1;
l=TH1;
m=TL1;
P1=0xF3;
for(x=10;
for(y=100;
P2=0xf5;
P0=led[x%10];
delay_5ms();
P2=0xfa;
P0=led[x/10];
//特殊情况倒计时
}
voidmain()//主函数
uchar*PTR=&
DispX;
TMOD=0x21;
//工作方式寄存器TMOD用于选择定时器/计数器的工作模式和工作方式,由TMOD可知,定时器T1工作在方式2,定时器T0工作在方式1
TH1=0xf4;
//由波特率为2400kb/s,晶体频率为11.0592MHz,可知定时器T1的初值,又因为定时器T1采用方式2,8位初值自动重装入的8位定时器/计数器,故TH1,TL1初值相同
TL1=0xf4;
TR0=1;
TR1=1;
SCON=0x50;
//SCON为串行口控制寄存器,采用方式1,允许串行接收
PCON=0x00;
//设置波特率SMOD
IE=0x95;
//IE为中断允许寄存器,允许串行口中断,允许外部中断1中断,允许外部中断0中断
IP=0x11;
//串行口中断、外部中断0设定为高优先级中断
IT0=1;
//外部中断0的中断请求信号为边沿触发(下降沿有效)
IT1=1;
//外部中断1的中断请求信号为边沿触发(下降沿有效)
while
(1){
AFangXing();
//A道绿灯B道红灯
ShanShuo(PTR);
//A绿灯闪烁2次,B道红灯
ShanShuo(++PTR);
JingGao(++PTR);
//A道黄灯B道红灯
BFangXing();
//B道绿灯A道红灯
//B绿灯闪烁2次,A道红灯
//B道黄灯A道红灯
PTR=&
voidAFangXing(void)
uchari,j;
P1=0xf3;
//A道绿灯B道红灯
for(i=55;
i>
i--)
for(j=50;
j>
j--)
P2=0xfd;
P0=led[i%10];
//显示A方向秒个位
P2=0xfe;
P0=led[i/10];
//显示A方向秒十位
P2=0xf7;
P0=led[(i+5)%10];
//显示B秒个位
P2=0xfb;
P0=led[(i+5)/10];
//显示B秒十位
voidShanShuo(uchar*PTR)
for(i=1;
i--)
P1=*PTR;
for(j=25;
{
//显示B方向个位
//显示B方向十位
voidJingGao(uchar*PTR)
for(i=2;
}
voidBFangXing(void)
P1=0xde;
//A道红灯B道绿灯
//显示B方向秒十位
voidserial()interrupt4
uchari;
if(RI==1)
RI=0;
if(SBUF==0x01)
SBUF=0x01;
while(!
TI);
TI=0;
i=P1;
P1=0xdb;
while(SBUF!
=0x02)
RI);
SBUF=0x02;
else
六、设计总结
本次实训运用Keil作为编译环境,用Proteus作为仿真软件。
然后将程序下载到自己焊接的硬件电路中。
由于Proteus软件功能的局限性,当仿真电路的数码管位选加上三极管作为驱动放大器时,数码管不能成功显示要显示的数,只显示8888或者9999这两个数,但为了与硬件电路一致,用Proteus仿真时改用非门代替三极管。
当老师给我们布置这个课程设计时,我感到无从下手,不知道该怎样写程序。
后来通过读老师的程序,慢慢明白了,知道了如何去做。
对于这样的课程设计,应该先用Proteus画出仿真电路,然后根据电路图编写程序。
通过编写程序,对单片机C语言有了更进一步的掌握。
经过本次设计对Keil和Proteus更加熟悉了。
在焊接电路的过程中,一定要注意:
不能虚焊,更不能连焊,对某个元件焊接时间不能太长,焊锡不要用太多,容易造成连焊。
电路上电前一定要仔细检查单片机等芯片是否装反,确认无误后再下载程序。
总的来说,通过本次课程设计,学到了很多知识,为以后再用单片机做电路时积累了经验。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 模拟 交通 控制 设计
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 12处方点评管理规范实施细则_精品文档.doc
12处方点评管理规范实施细则_精品文档.doc
-
12核心制度竞赛题库_精品文档.doc
-
12新医疗技术准入制度_精品文档.docx
-
12月份医务科质控通报_精品文档.doc
-
12项基本公共卫生服务项目_精品文档.docx
-
12月环境卫生学监测方法考核试题_精品文档.doc
-
13双重预防体系风险评价制度及准则_精品文档.doc
-
12种不能忽视的可能的心脏病症状_精品文档.doc
-
13检验科“三基”考试试卷_精品文档.doc
-
14以预防为先导_精品文档.doc
-
12高危药品分级管理制度及目录_精品文档.doc
-
13个病种中医护理方案_精品文档.docx
-
16检验科应对突发事件应急预案_精品文档.docx
-
12急救药品管理制度_精品文档.doc
 17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
17种抗癌药纳入国家基本医疗保险工伤保险和生育保险药品目录_精品文档.xls
-
14医疗器械召回程序_精品文档.wps
-
13医用耗材库房管理制度_精品文档.doc
-
136个幼儿园英语课堂游戏_精品文档.docx
-
12经络彩图_精品文档.doc
-
151颅脑损伤恢复期康复临床路径_精品文档.doc
-
14项护理核心制度_精品文档.doc
-
12检验科化学危险物品使用准则_精品文档.doc
-
15-消化内镜手术分级目录_精品文档.xls
-
13术前讨论记录本模板_精品文档.doc
-
17-下腰痛评估表JOAVAPS_精品文档.doc
-
12项基本公共卫生服务流程图_精品文档.doc
-
13中国髋膝关节置换的现状及展望_精品文档.docx
-
14种最迷惑人的癌症前兆_精品文档.docx
-
17消毒供应室医院感染管理制度_精品文档.doc
-
15附加住院津贴保险条款的费率-人保财险备-健康附号_精品文档.doc
-
19陕西省崔家沟监狱罪犯医疗防疫总站突发事件预案_精品文档.doc
-
20项护理技术操作规程及评分标准_精品文档.doc
-
手机品牌排行榜.docx
-
如何保证会计信息的真实性.docx
-
书籍设计实训教案.docx
-
如何正确理解绩效管理000001.docx
-
数据库考试题.docx
-
三级健康管理师考试题目及答案.docx
-
思修题库第六章.docx
-
山东青岛高三一模英语试题无答案.docx
-
四川省学年眉山市高一上学期期末考试数学试题.docx
-
司法局优化发展环境建设工作总结.docx
-
天竹园小户型物业管理方案计划.docx
-
通讯稿600字18篇.docx
-
土地利用总体规划大纲.docx
-
完整版最新人教版三年级英语上册单元测试题.docx
-
完整升级版人教版九年级下语文表格式教案.docx
-
晚上给女朋友讲的睡前故事10篇大全.docx
-
我们生活的大洲亚洲教案.docx
-
人教版物理八年级上册 第1章 机械运动 测量平均速度实验题 计算题 专项训练附解析.docx
-
五一促销主题.docx
