 毕题报告1620.docx
毕题报告1620.docx
- 文档编号:29724901
- 上传时间:2023-07-26
- 格式:DOCX
- 页数:15
- 大小:412.50KB
毕题报告1620.docx
《毕题报告1620.docx》由会员分享,可在线阅读,更多相关《毕题报告1620.docx(15页珍藏版)》请在冰豆网上搜索。
毕题报告1620
自动控制课程设计
毕题报告
双容水箱液位控制的实现
指导老师:
完成日期:
2013/6/30
一、实验目的
1、掌握自动控制系统的分析与控制器设计方法
2、掌握基于MATLAB的系统仿真方法
3、掌握基于实验方法确定系统模型参数的方法
4、掌握基于物理对象的控制系统的调试方法
5、培养编制技术总结报告的能力
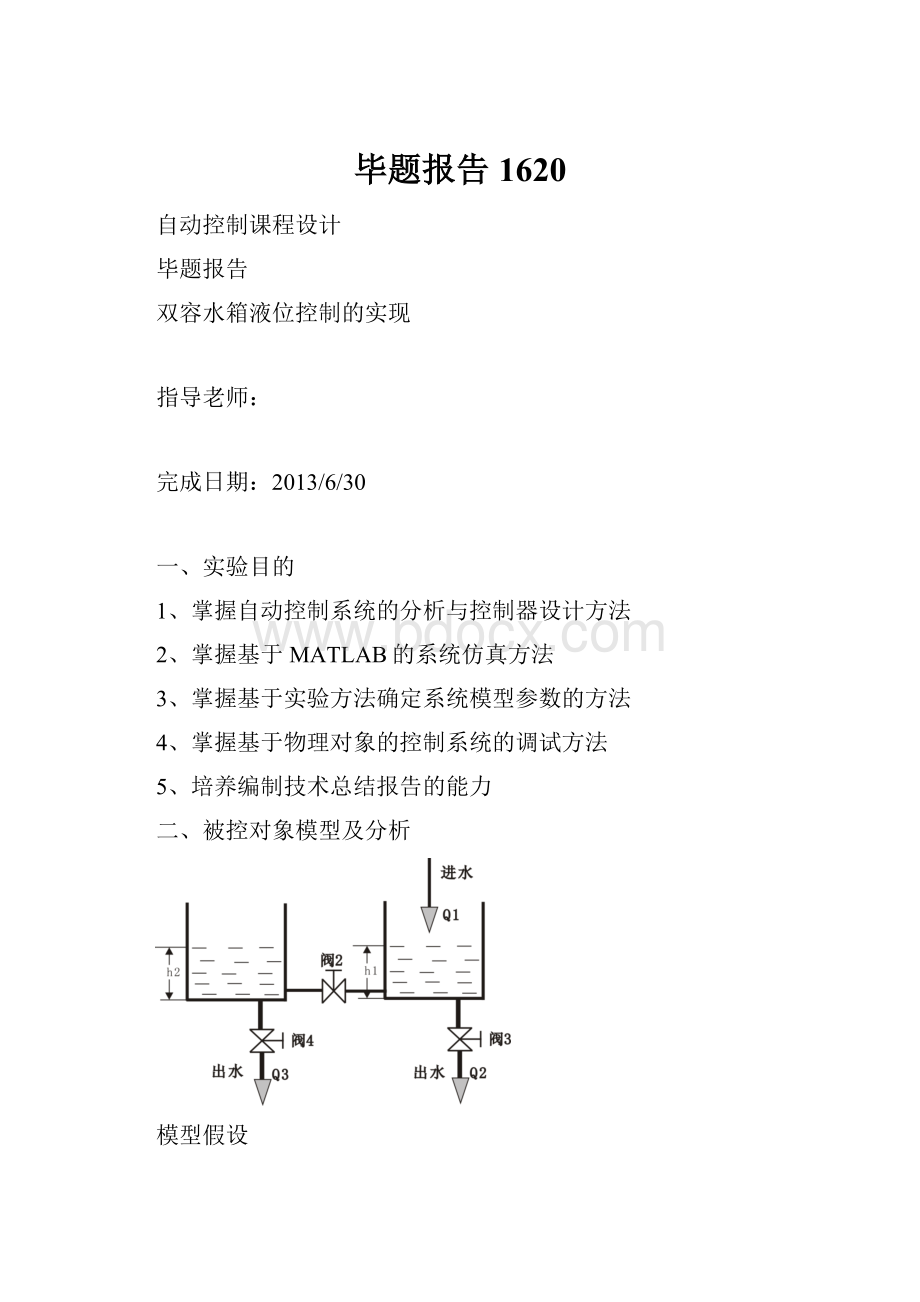
二、被控对象模型及分析
模型假设
①每个模型均不考虑流动过程中,管道及阀门的阻力以及流体的黏性。
②在建立模型之前,先假定,水箱进口流量恒定,出口流量可以改变。
已知被测对象由两个相同的水箱串联而成,由动态方程可得单容水箱:
G(s)=K/(1+Ts)
所以双容对象数学模型为两个单容对象的乘积:
式中K=R4,T1=R2C1,T2=R4C2,R2、R4分别为阀V3和V4的液阻,C1和C2分别为左水箱和右水箱的容量系数。
控制对象传递函数测定:
1、
通过THBDC型控制理论实验台与双容水箱连接,对双容水箱施加阶跃信号,通过虚拟示波器观察系统阶跃响应。
2、通过两点计算法获得对象传函
系统采样图如下:
t1/t2=0.426<0.46所以符合二阶系统特点
根据公式:
{T1+T2=114.48T1*T2=2914.7}
得到传函:
G(s)=0.842e^-54s/(76.26s+1)(38.22s+1)
=0.842e^-54s/(2914.66s^2+114.48s+1)
系统仿真图如下:
三、系统控制方案
1.性能指标要求
衰减率4:
1~10:
1,超调量Mp≤10%,调节时间Ts≤45s,稳态误差ess=0
2.系统方案论证
我们最后采用了串级PID控制
(1)串级控制的优点:
串级控制系统对进入副回路的扰动具有较强的克服能力。
由于副回路的存在,明显改善了对象的特性,提高了系统的工作频率。
串级控制系统具有一定的自适应能力。
(2)主要应用于以下4中场合
1.对象的容量滞后比较大。
2.调节对象的纯滞后比较长。
3.系统内存在激烈且幅值较大的干扰作用。
4.调节对象具有较大的非线性特性而且负荷变化较大。
而双容水箱均有上述缺点,因此可以看出串级控制系统很适合应用于双容水箱液位控制系统的设计
四、控制结构与控制器设计步骤
1.PID参数获取
在PID参数获取方法上,我们选用了临界比例度法。
在闭合控制系统中,把调节器的积分时间TI置于最大,微分时间TD置零,比例度δ置于较大数值,把系统投入闭环运行,将调节器的比例度δ由大到小逐渐减小,得到临界振荡过程,记录下此时的临界比例度δk和临界振荡周期Tk。
根据以下经验公式计算调节器参数:
调节器参数
控制规律
δ
TI
TD
P
2δk
PI
2.2δk
TK/1.2
PID
1.6δk
0.5Tk
0.25Tk
2.实验获取参数
系统等幅震荡曲线
得出K=2.47
3.经验公式求得PID参数
Kp=90
Ki=2.5
Kd=22
4.串级PID系统仿真
主副对象的传函:
主对象:
0.842/(2914.66s^2+114.48s+1)
副对象:
0.897/(25.20s+1)
副回路仿真:
系统给定10的阶跃响应曲线图如下:
符合Mp≤10%,调节时间Ts≤45s,稳态误差ess=0
5、实验过程
1.实时控制
在进行实时控制后,我们发现系统完全不可控,如上图,Scope观察的是系统最后对电磁阀的输出电压波形。
无论怎么调整参数,其输出值都高达10^300V,控制阀门开度的电压一直是接近无穷,实际中则一直是4.95V,也就是满开度,而且开度不会随着液位的上升而减小。
这显然是不正常的。
在请教了老师和同学后,我们去掉了微分控制环节。
即另控制器中的Kd=0,也就是放弃了PID控制,转而使用PI控制。
经过调整后,发现系统有了好转,开始有张有弛了。
经过进一步调整参数,得到了较为满意的性能。
给定液位2CM系统响应曲线图如下:
调节时间有些长,系统稳定性良好。
但一天之后我们再做实时控制时,情况就发生了变化,只能重新调整PID参数。
得到如下曲线图:
后来发现水箱的变送器经常会出现+-1V的变化,这对于本次实验的影响还是很大的,所以我们决定每天做实验前先测试变送器,让其保持在一下范围:
水箱1:
0cm——1.172V
10cm——1.70V
水箱2:
0cm——0.995V
10cm——1.82V
经过调整之后,给定2CM液位的控制,除了调节时间过慢,其他性能还不错。
但当我们进行给定4CM液位控制的时候,系统的表现出乎我们的意料,出现了极大地波动,超调量也变得很大。
只得在给定4CM是重新调整PID参数。
调整得当后,用这个控制器再回去控制2CM液位时,系统的表现还算稳定。
给定2CM液位系统响应曲线如下:
此时的PI控制器参数为:
Kp=2.5
Ki=0.08
给定2CM,稳定后向水箱2加水,系统响应图如下:
给定4CM,并且在系统稳定后,向水箱2加水,系统响应图如下:
给定4CM,稳定后加大阀4开度,系统响应图如下:
我们最后的实验成果就基本如此,可以看到,虽然能实现液位控制,超调量、稳态误差基本符合要求,也能做到对于正扰动和负扰动的抗干扰要求,但是系统的调节时间始终不理想。
我们认为是阀门开度为最大的时间不够长,使得水箱2上水太慢,所以我们想让阀门开度最大的时间长一点,于是尝试了一下switch模块。
实时控制图如下:
之前报告里讲过,但凡我们的PID控制器中,有微分环节存在,阀门开度就一直降不下来,而这恰恰是现在我们阶段性需要的。
我们设想,在响应初段,让带有微分环节的PID控制器进行控制,在水给的足够多时,再用不带微分环节的PID控制器进行控制。
这样有可能实现快速响应与稳定、准确控制的双赢。
于是如上图所示,我们将水箱1的液位输出作为switch的判断变量,接到input2,带有微分环节的PID控制器和不带微分环节的PID控制器分别接input1、input3。
理想情况下,当水箱1的液位没达到Xcm时,系统由PID控制器控制,阀门开度最大,当水箱1的液位达到Xcm时,系统由PI控制器控制,阀门开度受控。
但是经过几次测试,现实并不像设计中那么理想,而验收时间越来越紧迫,我们最后只得放弃了这种控制方法。
七、总结
通过这一段时间的理论学习和实践操作,我们的理论知识和实际操作水平都有很大的提高,认识到了理论联系实践的重要性。
掌握自动控制系统的分析与控制器设计方法、MATLAB的系统仿真方法、基于实验方法确定系统模型参数的方法及基于物理对象的控制系统的调试方法,初步达到实验的目的。
最深刻的是这次实验,用到了许多这学期刚学到的过程控制理论中的很多知识,本来大家觉得不错:
“我们过控学的还不错,考的也还行。
感觉里面的知识也理解了不少!
”而在实验中,虽然会用到书本中的知识,但决不是直接搬过来就能用,真的是需要具体问题具体分析,让我们真正体验了一把设计控制系统的过程。
中间的每一步,建模、仿真、实时控制,书上都有,但是跟现实都不一样,只能这用一点,那用一点。
最后还是得靠自己去尝试,才能完成。
总之这次课程设计,真是让人感触良多。
从不会到会,从瓶颈到曙光,那种感觉只有经历了才有体会。
有的时候真的感觉要不行了,做不出来了,没有方向,书上也找不到类似情况的讲解和解决办法。
组员之间商量下一步怎么办,这其中有合作与信任,也免不了有着矛盾与冲突。
这些过程,一幕幕真的太有意思了,值得记忆,值得体会。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 报告 1620
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《贝的故事》教案4.docx
《贝的故事》教案4.docx
-
《对韵歌》优秀教案8.docx
-
《函数yAsinωx+φ+P图象》wwwnet.docx
-
《静夜思》教学设计.docx
-
《汽车底盘构造与维修》题库与考核标准.docx
-
《世说新语》复习资料.docx
-
《我的服装我做主》教案设计.docx
-
《在品味情感中成长》教学片断设计.docx
-
11造价员《建设工程造价管理基础知识》精讲教程文件.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《操作系统》二学期A卷及答案.docx
-
《傅雷家书》名著阅读笔记.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《化工原理》第六章蒸发.docx
-
《蓝海战略》概要11页.docx
-
《人生》读书心得.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《272 向量的应用举例》导学案1.docx
-
《秋天》评课稿.docx
-
《电算化》第二章会计电算化的工作环境章节练习.docx
-
《室外给排水管道》施组.docx
-
《广东省建筑与装饰工程综合定额》计算规则.docx
-
《我多想去看看》教学.docx
-
《直通车车手基础认证》 考试答案 70题之欧阳育创编.docx
-
7天销量翻10倍皇冠卖家教您玩转最精准流量.docx
-
9 阿长和山海经.docx
-
《比例尺》教案.docx
-
《菜根谭》注译四闲适篇.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
会员卡管理制度修正版Word格式.docx
-
夯扩桩专项施工方案呕心沥血整理版文档格式.docx
-
课后服务工作管理制度完整Word文件下载.docx
-
有限元受力分析结构梁 力 计算Word文件下载.docx
-
有关阅读教学中理解课文内容和形式问题内容与形式举例Word文件下载.docx
-
电动机运行状态监测系统Word文件下载.docx
-
广州市番禺区八年级下学期期末英语模拟试题Word文件下载.docx
-
三国演义主要内容Word文档下载推荐.docx
-
临时用电专项施工方案文档格式.docx
-
机械制造技术基础期末考试试题及答案全解Word下载.docx
-
V3Cmini用户使用手册资料Word文档格式.docx
-
物流管理信息系统之订单管理子系统设计课程设计说明书文档格式.docx
-
综合交通运输改革试点实施方案Word文件下载.docx
-
天宝GPSTSC3软件中cors设置操作手册最新版Word文档格式.docx
-
教育资料四年级上册英语同步拓展M3Unit3Intheshop讲义牛津上海版学习专用Word格式文档下载.docx
-
第47讲应付职工薪酬的核算2Word文档格式.docx
-
汕头防御暴雨应急预案Word文件下载.docx
-
六安扶贫攻坚实施方案Word文件下载.docx
-
砂石系统施工组织设计Word格式.docx
