 基于三维点云航空发动机管路全范围间隙测量方法及应用.pdf
基于三维点云航空发动机管路全范围间隙测量方法及应用.pdf
- 文档编号:30838878
- 上传时间:2024-01-30
- 格式:PDF
- 页数:14
- 大小:2.39MB
基于三维点云航空发动机管路全范围间隙测量方法及应用.pdf
《基于三维点云航空发动机管路全范围间隙测量方法及应用.pdf》由会员分享,可在线阅读,更多相关《基于三维点云航空发动机管路全范围间隙测量方法及应用.pdf(14页珍藏版)》请在冰豆网上搜索。
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号(43)申请公布日(21)申请号202210082716.5(22)申请日2022.01.25(71)申请人北京工商大学地址100083北京市海淀区阜成路33号申请人北京航空航天大学(72)发明人张洁孙军华周子泰(74)专利代理机构北京君有知识产权代理事务所(普通合伙)11630代理人焦丽雅(51)Int.Cl.G06T7/00(2017.01)G06T7/62(2017.01)G06T7/68(2017.01)G06V10/26(2022.01)G06V10/762(2022.01)G06V10/82(2022.01)G06K9/62(2022.01)(54)发明名称基于三维点云航空发动机管路全范围间隙测量方法及应用(57)摘要一种基于三维点云航空发动机管路全范围间隙测量方法及应用,包括管道段在全场景范围的最小间隙测量和管路延轴线全范围的各段最小间隙测量。
在待检航空发动机三维点云上分割出管路实例,将各条管路视为圆柱段的序列;在各管路上采集并拟合初始圆柱段,采集圆柱段轴心所在正截面的点集并搜索至轴心距离最近的管道段外部点,该距离作为段管道在全场景中最小间隙;延初始圆柱段轴向两端分别地检测并拟合管道段,对各管道段最小间隙测量,实现各条管路在全发动机场景中延轴线全范围的间隙测量。
本发明能精确、高效地测量航空发动机或其他多条复杂分布的自由弯曲长管道的间隙,具有抗杂乱场景干扰、抗点云噪声、间隙测量范围全面的特点。
权利要求书3页说明书6页附图4页CN114419012A2022.04.29CN114419012A1.一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于,包括以下步骤:
步骤a:
对航空发动机管路的三维实例分割;步骤b:
实现管道初始段的提取和参数化;步骤c、搜索管道段正截面方向的外部点云;步骤d、搜索管道段在全场景范围的最小间隙点;步骤e、测量管道全范围各段的最小间隙。
2.根据权利要求1所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤a:
在待检航空发动机的三维点云中,通过大场景三维点云深度特征学习模型进行点云特征编码,对该点云深度特征学习模型在大型三维点云数据集上进行训练,确定模型参数,然后该模型可用于预测待检测的航空发动机点云的逐点语义信息,并分割出航空发动机上的管道点云;对管道点云进行基于点密度的聚类,区分出各管道实例,完成三维管道的实例分割。
3.根据权利要求1所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤b:
实现管道初始段的提取和参数化:
对各三维管道实例,从管道点云中随机提取一个三维点,以该采样点为中心,在航空发动机点云上采集一个球形范围的三维局部点云块D,对三维局部点云块D进行圆柱拟合,作为该条管道实例的初始段,根据圆柱几何模型将管道段参数化表示为三个几何元素,即圆柱轴心、轴向和半径。
4.根据权利要求1所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤c:
以初始管道段轴心为中心,在航空发动机点云上重新采样一个球形范围的三维点云块S;通过计算三维点云块S中各点到该管道段轴心所在的管道正截面的距离,在S中筛选出管道段正截面上的三维点集;计算正截面上的各三维点到管道段轴心的距离,距离大于管道段半径的三维点判断为管道外点,送入管道外点集Outlier,否则为管道上或内部点。
5.根据权利要求4所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤d:
在管道外点集Outlier中,搜索各点到管道段轴心的最小距离点,该最小距离作为该管道段在场景中的最小间隙。
6.根据权利要求1所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤e:
针对各三维管道实例,将一根管道表述为一个圆柱段序列,以步骤b获取的初始管道段为起点,利用长范围自由弯曲管道在空间上的连续性属性,向初始管道段轴向两端分别延伸搜索相连的管道段,在各管道段处,根据步骤c和d搜索管道段在场景中的最小间隙点并测量最小间隙,实现管道延轴向全范围各段的最小间隙测量。
7.根据权利要求3所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤b进一步包括如下内容:
对一根从发动机点云中分割出的三维管道,从管道点云中随机提取一个三维点,以该采样点为中心,在航空发动机点云上采集一个球形范围的三维局部点云块,其中表示三维局部点云块D中的一个三维点,表示三维空间域,m为三维点的索引,若该点云块共有n个点,则;根据圆柱几何模型对三维局部点云块D进行圆柱拟合,权利要求书1/3页2CN114419012A2将管道段参数化表示:
其中为圆柱的轴心变量,为圆柱的轴线变量,rad为圆柱的半径变量,为管道段的三个几何元素集,包括最优圆柱轴心、轴线及半径;该参数化表示的圆柱段作为该根管道的初始管道段。
8.根据权利要求4所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤c进一步包括如下内容:
以初始管道段轴心为中心,在航空发动机点云上重新采样一个球形范围的三维点云块,其中表示该三维点云块S中的一个三维点,表示三维空间域,k为三维点云块S中的三维点的索引;建立管道段轴心所在的正截面Cross,即该正截面垂直于该管道段的轴向,满足且;通过计算三维点云块S中各点到该管道段正截面的垂直距离,筛选出S中在管道段正截面上的三维点集;计算正截面上的各三维点到管道段轴心的距离,距离大于管道段半径rad的三维点判断为管道外点,否则为管道上或内部点;若在当前点云块S中未搜索到管道外点,即,则增大采样半径,重新采集三维点云块,并重复步骤c的过程,直至找到管道外点集。
9.根据权利要求4所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤d进一步包括如下内容:
搜索管道段在全场景范围的最小间隙点:
在步骤c得到的管道外点中,计算各点到管道段轴心的距离,组成距离集合;搜索最小距离点对应的三维点,如下:
其中为最小距离,作为该管道段在场景中的最小间隙。
10.根据权利要求6所述的一种基于三维点云的航空发动机管路全范围间隙测量方法,其特征在于:
所述步骤e具体实现过程如下:
(1)针对各三维管道实例,将一根管道表述为一个圆柱段序列,以步骤b获取的初始管道段为起点,利用长范围自由弯曲管道在空间上的连续性属性,向初始管道段轴向两端分别进行延伸,检测相连的管道段,相邻两个参数化的管道段的连续性关系初始近似为线性关系,如下:
,其中为当前时刻t的管道段圆柱轴心,为当前时刻t的管道段圆柱轴线方向,stride为延伸步长变量,为下一时刻t+1的管道段圆柱轴心,为下一时刻t+1的管道段圆柱轴线方向;根据该线性近似连续性关系,可根据当前时刻管道段的参数化表示预测出下一相连管道段的初始位置;权利要求书2/3页3CN114419012A3
(2)在各相连的管道段的初始预测位置,根据步骤b对管道段进行球形区域三维点云块的采样和圆柱拟合,实现管道段的几何参数化,根据步骤c搜索管道段外部点,根据步骤d进行管道段的最小间隙测量;最终可实现整根管道延轴向全范围各段的间隙测量。
11.将权利要求110任一所述的基于三维点云的航空发动机管路全范围间隙测量方法应用于航空发动机管路系统的全范围间隙自动测量系统中。
权利要求书3/3页4CN114419012A4基于三维点云航空发动机管路全范围间隙测量方法及应用技术领域0001本发明涉及一种基于三维点云的航空发动机管路全范围间隙测量方法及其应用,属于工业视觉领域,特别涉及三维视觉领域。
背景技术0002随着工业制造和装配领域的快速发展,各国越来越注重工业水平的提高,尤其是航空领域,航空发动机作为一种核心航空器件,从设计、加工到装配都具有极其严格的要求。
为保证运行过程中的稳定性与安全性,在航空发动机装配结束后需要进行一系列严密的整体检测工作。
管路作为发动机外部分布最为广泛的部件,是发动机的燃油系统、滑油系统、空气系统、防冰系统和测试系统传输介质的主要载体,管路与管路之间、管路与机体之间合格的间隙是发动机安全稳定运行重要条件之一,所以精准测量航空发动机管路系统中错综复杂的各条管路在整个发动机体全范围的间隙是发动机整机检测的重要环节。
0003航空发动机管路系统的全范围间隙自动测量是一项极具挑战性的任务,主要有两大难点:
1)大量管路密布在结构复杂的机体上,存在交叉、层叠、部分遮挡等情况,在杂乱场景中自动地检出所有完整管道用于间隙测量是一大难点;2)各条管路处于各种自由弯曲的形态,覆盖较长的空间范围,在全场景中对管道整个长度范围的各段进行精准的最小间隙测量是一个难点。
0004现有的航空发动机间隙测量方法主要采用接触式的方法,即通过人工使用塞规、塞尺检测管路间隙,该种方法存在测量效率低、测量范围有限的问题,难以获得精确的最小间隙值,同时,接触式的工具使用存在着对机体造成轻微划伤的风险。
面对密集大量的管路全范围间隙检测任务,采用自动的最小间隙监测方法对提升工业装配和质检效率具有重要意义。
0005视觉技术在工业智能制造中发挥着重要的作用,视觉技术主要基于二维图像或三维视觉重建对场景进行检测、测量和高层次理解。
在航空发动机管路系统间隙测量任务上,二维图像由于缺少真实场景的几何距离和尺寸信息,无法实现精密的三维空间测量;三维点云作为一种三维空间的采样数据,含有空间真实结构和距离信息,是实现三维几何测量的重要数据模态。
近年来,随着三维采集技术的快速发展,三维传感器越来越普及,三维点云数据的获取也更加便捷,对工业制造和质检领域的自动化、智能化水平提升具有重要意义。
现有的基于三维点云的管路分析方法大多关注管路的提取和建模,对全范围间隙测量的研究仍是个空白。
本发明设计了基于三维点云的航空发动机管路全范围间隙测量方法,可实现自动、高效、准确、完整地监测大型航空发动机体表面复杂分布的管路各位置在整个场景中的间隙,对保障发动机体的装配质量和运行安全具有重要价值。
发明内容0006针对航空发动机上的三维自由弯曲的长管道各段在航空发动机体中的间隙测量说明书1/6页5CN114419012A5问题,提供一种基于三维点云的的航空发动机管路全范围间隙测量方法,该方法适应分布于复杂发动机体中粗细不同、长度覆盖范围大、弯曲程度不同的管道系统,实现多管道在复杂场景中的全方位全范围精确间隙测量。
0007本发明总体设计思路为:
首先在待检航空发动机三维点云上分割出管路实例,将各条管路表示为圆柱段的序列,在各管路上采集并拟合初始圆柱段,采集圆柱段轴心所在正截面的点集,在点集中搜索至轴心距离最近的管道段外部点,该最小距离即作为该段管道在全场景中的最小间隙;延初始圆柱段轴向两端分别有序地检测并拟合管道段,对各管道段进行上述最小间隙测量,最终实现各条管路在全发动机场景中延轴线全范围的间隙测量。
0008本发明的技术方案如下,一种基于三维点云的航空发动机管路全范围间隙测量方法,包括以下步骤:
步骤a、航空发动机管路的三维实例分割:
在待检航空发动机的三维点云中,通过大场景三维点云深度特征学习模型进行点云特征编码,对该点云深度特征学习模型在大型三维点云数据集上进行训练,确定模型参数,然后该模型可用于预测待检测的航空发动机点云的逐点语义信息,并分割出航空发动机上的管道点云;对管道点云进行基于点密度的聚类,区分出各管道实例,完成三维管道的实例分割;步骤b、管道初始段的提取和参数化:
对各三维管道实例,从管道点云中随机提取一个三维点,以该采样点为中心,在航空发动机点云上采集一个球形范围的三维局部点云块D,对三维局部点云块D进行圆柱拟合,作为该条管道实例的初始段,根据圆柱几何模型将管道段参数化表示为三个几何元素,即圆柱轴心、轴向和半径;步骤c、搜索管道段正截面方向的外部点云:
以初始管道段轴心为中心,在航空发动机点云上重新采样一个球形范围的三维点云块S;通过计算三维点云块S中各点到该管道段轴心所在的管道正截面的距离,在S中筛选出管道段正截面上的三维点集;计算正截面上的各三维点到管道段轴心的距离,距离大于管道段半径的三维点判断为管道外点,送入管道外点集Outlier,否则为管道上或内部点;步骤d、搜索管道段在全场景范围的最小间隙点:
在管道外点集Outlier中,搜索各点到管道段轴心的最小距离点,该最小距离作为该管道段在场景中的最小间隙;步骤e、测量管道全范围各段的最小间隙:
针对各三维管道实例,将一根管道表述为一个圆柱段序列,以步骤b获取的初始管道段为起点,利用长范围自由弯曲管道在空间上的连续性属性,向初始管道段轴向两端分别延伸搜索相连的管道段,在各管道段处,根据步骤c和d搜索管道段在场景中的最小间隙点并测量最小间隙,实现管道延轴向全范围各段的最小间隙测量;进一步的,所述步骤b具体实现过程为,对一根从发动机点云中分割出的三维管道,从管道点云中随机提取一个三维点,以该采样点为中心,在航空发动机点云上采集一个球形范围的三维局部点云块,其中表示三维局部点云块D中的一个三维点,R3表示三维空间域,m为三维点的索引,若该点云块共有n个点,则;根据圆柱几何模型对三维局部点云块D进行圆柱拟合,将管道段参数化表示为三个几何元素,即圆柱轴心、轴向和半径;拟合过程为一个优化过程,其优化目标函数为说明书2/6页6CN114419012A6其中为圆柱的轴心变量,为圆柱的轴线变量,rad为圆柱的半径变量,为管道段的三个几何元素集,包括最优圆柱轴心、轴线及半径。
该参数化表示的圆柱段作为该根管道的初始管道段。
0009进一步的,所述步骤c具体实现过程如下,以初始管道段轴心为中心,在航空发动机点云上重新采样一个球形范围的三维点云块,其中表示该三维点云块S中的一个三维点,R3表示三维空间域,k为三维点云块S中的三维点的索引;建立管道段轴心所在的正截面Cross,即该正截面垂直于该管道段的轴向,满足且。
通过计算三维点云块S中各点到该管道段正截面的垂直距离,筛选出S中在管道段正截面上的三维点集;计算正截面上的各三维点到管道段轴心的距离,距离大于管道段半径rad的三维点判断为管道外点,否则为管道上或内部点;若在当前点云块S中未搜索到管道外点,即,则增大采样半径,重新采集三维点云块,并重复步骤c的过程,直至找到管道外点集;进一步的,所述步骤d,搜索管道段在全场景范围的最小间隙点:
在步骤c得到的管道外点中,计算各点到管道段轴心的距离,组成距离集合Dis;搜索最小距离点对应的三维点,如下,其中为最小距离,作为该管道段在场景中的最小间隙;进一步的,所述步骤e,具体实现过程如下:
(1)针对各三维管道实例,将一根管道表述为一个圆柱段序列,以步骤b获取的初始管道段为起点,利用长范围自由弯曲管道在空间上的连续性属性,向初始管道段轴向两端分别进行延伸,检测相连的管道段,相邻两个参数化的管道段的连续性关系初始近似为线性关系,如下:
其中为当前时刻t的管道段圆柱轴心,为当前时刻t的管道段圆柱轴线方向,stride为延伸步长变量,为下一时刻t+1的管道段圆柱轴心,为下一时刻t+1的管道段圆柱轴线方向。
根据该线性近似连续性关系,可根据当前时刻管道段的参数化表示预测出下一相连管道段的初始位置。
0010
(2)在各相连的管道段的初始预测位置,根据步骤b对管道段进行球形区域三维点云块的采样和圆柱拟合,实现管道段的几何参数化,根据步骤c搜索管道段外部点,根据步骤d进行管道段的最小间隙测量。
最终可实现整根管道延轴向全范围各段的间隙测量。
0011本发明还公开一种将上述的基于三维点云的航空发动机管路全范围间隙测量方说明书3/6页7CN114419012A7法应用于航空发动机管路系统的全范围间隙自动测量系统中。
0012本发明与现有技术相比的优点在于:
(1)本发明提供的航空发动机管路全范围间隙测量方法直接基于航空发动机三维点云数据进行,能够有效利用航空发动机全场景的真实几何结构和形貌信息,避免了基于二维图像的分析方法中待测目标受光照变化、视角遮挡、深度信息损失等因素的影响;
(2)本发明基于管道段的空间连续性和几何相关性,设计管道段时序生长模式进行管道各段的几何参数化表示和全方位间隙测量,可适应于任意空间位姿、自由弯曲、长度覆盖范围大的几何形态多样化管道,较现有直管道或有位姿约束的管道参数测量方法,具有更广泛的适用性;(3)本发明采用两步式进行管道全范围间隙测量,首先基于显著高效的管道深度特征实现杂乱场景中的管道分割,使得管道间隙的测量能够抵抗杂乱场景的干扰;然后在管道段生长模式中进行管道段的参数化拟合,该步骤可滤除管道外点和召回第一阶段未分割出的管道点,使得间隙测量的管道长度范围覆盖更完整,本发明适用于工业大场景应用场合。
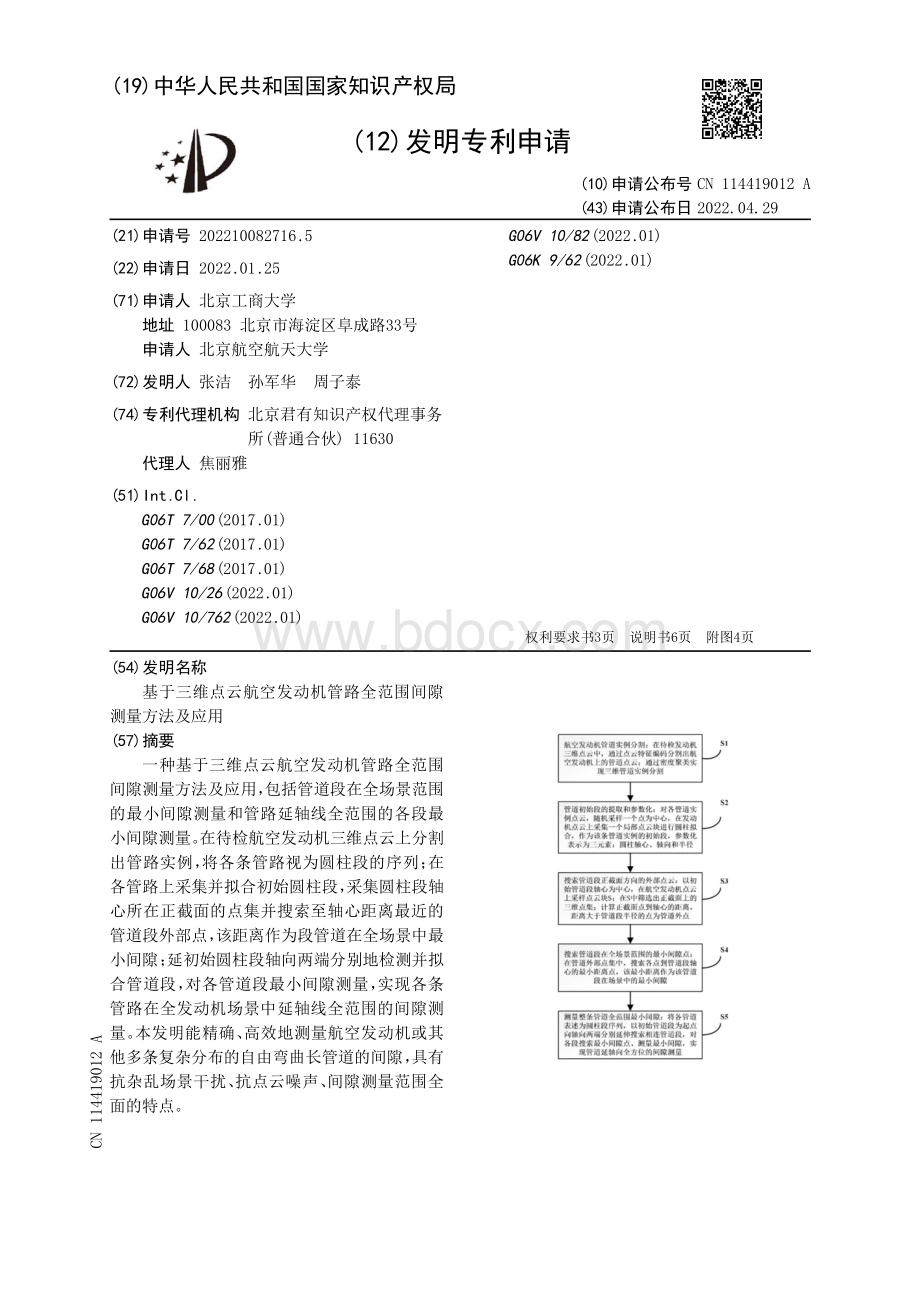
附图说明0013图1为本发明的总体实现流程图;图2为航空发动机局部点云场景中的管路实例分割结果图;图3为局部管路段的最小间隙测量结果图;图4为不同噪声水平下本发明的测量精度变化图。
具体实施方式0014下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅为本发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域的普通技术人员在不付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
0015本发明的一个具体实施例的总体实现流程图,如图1所述,具体包括以下步骤:
步骤S1:
航空发动机管路的三维实例分割:
对于一个待检航空发动机的三维点云,定义管道点为前景点,其余点为场景点;利用大场景三维点云深度特征学习模型进行点云特征编码:
首先,对该点云深度特征学习模型在大型三维点云数据集上进行训练,确定模型参数,然后该模型可用于预测待检测的对航空发动机点云场景进行栅格采样,各栅格点作为发动机点云场景的关键点;然后,对各关键点及其邻域进行多层特征编码和学习,将各关键点映射到显著特征空间,根据各关键点的特征判断各点的语义信息,即管道点或背景点,从而获得航空发动机点云的逐点语义信息,分割出航空发动机上的管道点云;对分割出的管道点云根据点云密度进行聚类,区分出各管道实例,完成三维管道的实例分割,在一个实施例上的三维管道实例分割可视化结果如图2所示。
图2显示一个航空发动机局部结构的三维点云模型,其中各条管道点云可从该局部航空发动机体的三维点云模型中自动分割出来,并具有实例性,用于后续的管道实例参数化;步骤S2:
管道初始段的提取和参数化:
对一根从发动机点云中分割出的三维管道,说明书4/6页8CN114419012A8从管道点云中随机提取一个三维点,以该采样点为中心,在航空发动机点云上采集一个球形范围的三维局部点云块,其中表示三维局部点云块D中的一个三维点,R3表示三维空间域,m为三维点的索引,若该点云块共有n个点,则;根据圆柱几何模型对三维局部点云块D进行圆柱拟合,将管道段参数化表示为三个几何元素,即圆柱轴心、轴向和半径;拟合过程为一个优化过程,其优化目标函数为其中为圆柱的轴心变量,为圆柱的轴线变量,rad为圆柱的半径变量,为管道段的三个几何元素集,包括最优圆柱轴心、轴线及半径。
该参数化表示的圆柱段作为该根管道的初始管道段。
0016对各三维管道实例,从管道点云中随机提取一个三维点,以该采样点为中心,在航空发动机点云上采集一个球形范围的三维局部点云块D,根据航空发动机管道的半径分布范围,将采集点云块D的球形范围半径设为7mm,对三维局部点云块D进行圆柱拟合,作为该条管道实例的初始段,根据圆柱几何模型将管道段参数化表示为三个几何元素,即圆柱轴心、轴向和半径;在对点云块进行圆柱拟合的过程中,将圆柱拟合误差阈值设为1mm,当拟合误差大于该阈值时,认为拟合不成功,换采样点重新采样点云块,直到找到圆柱拟合误差小于阈值的圆柱段作为管道实例的初始段。
0017步骤S3、搜索管道段正截面方向的外部点云:
以初始管道段轴心为中心,在航空发动机点云上重新采样一个球形范围的三维点云块,其中表示该三维点云块S中的一个三维点,R3表示三维空间域,k为三维点云块S中的三维点的索引;建立管道段轴心所在的正截面Cross,即该正截面垂直于该管道段的轴向,满足且。
通过计算三维点云块S中各点到该管道段正截面的垂直距离,筛选出S中在管道段正截面上的三维点集;计算正截面上的各三维点到管道段轴心的距离,距离大于管道段半径rad的三维点判断为管道外点,否则为管道上或内部点;若在当前点云块S中未搜索到管道外点,即,则增大采样半径,重新采集三维点云块,并重复步骤c的过程,直至找到管道外点集;以初始管道段轴心为中心,在航空发动机点云上重新采样一个球形范围的三维点云块S,该球形采样半径设为初始管道段半径的1.2倍;计算三维点云块S中各点到该管道段轴心所在的管道正截面的垂直距离;设置一个距离阈值为0.5mm,当一个点到正截面的垂直距离大于0.5mm时,则认为该点不在管道段正截面上,否则计入管道正截面点集中,从而筛选出管道段正截面上的三维点集;步骤S4、搜索管道段在全场景范围的最小间隙点:
在步骤3得到的管道外点中,计算各点到管道段轴心的距离,组成距离集合Dis;搜索最小距离点对应的三维点,如下,其中为最小距离,作为该管道段在场景中的最小间隙;进一步说:
在步骤S3说明书5/6页9CN114419012A9中获得的管道外点集Outlier中,搜索各点到管道段轴心的最小距离点,该最小距离作为该管道段在场景中的最小间隙,该最小距离点即为最近场景点,图3显示了两根空间位置临近的局部管路段的最小间隙测量可视化结果。
其中各管道段轴心和延管道段正截面方向的周围最小间隙点通过直线连接,直线上的数字表示最小间隙值,单位为毫米mm。
0018步骤S5、测量管道全范围各段的最小间隙:
针对各三维管道实例,将一根管道表述为一个圆柱段序列,以步骤S2获取的初始管道段为起点,利用长范围自由弯曲管道在空间上的连续性属性,向初始管道段轴向两端分别进行延伸,检测相连的管道段,相邻两个参数化的管道段的连续性关系初始近似为线性关系,如下:
其中为当前时刻t的管道段圆柱轴心,为当前时刻t的管道段圆柱轴线方向,stride为延伸步长变量,为下一时刻t+1的管道段圆柱轴心,为下一时刻t+1的管道段圆柱轴线方向。
根据该线性近似连续性关系,可根据当前时刻管道段的参数化表示预测出下一相连管道段的初始位置。
在各相连的管道段的初始预测位置,根据步骤S2对管道段进行球形区域三维点云块的采样和圆柱拟合,实现管道段的几何参数化,根据步骤S3搜索管道段外部点,根据步骤S4进行管道段的最小间隙测量。
最终可实现整根管道延轴向全范围各段的间隙测量。
0019为了评价本发明的方法的精度,在仿真管路场景中加入不同水平的高斯噪声,重复上述管路全范围间隙测量过程,统计间隙测量误差,结果如图4所示。
图4显示了本发明的方法在不同的噪声水平下的间隙测量精度变化情况,其中噪声水平为高斯噪声的标准差水平,在0.01mm至0.1mm的范围内。
由于真实场景的三维点云重建精度为0.02mm,观察仿真场景中同噪声水平下的管路间隙测量情况。
经统计,该噪声水平下管路全范围间隙测量平均误差为0.0071mm。
0020本发明提供了一种基于三维点云的航空发动机管路全范围间隙测量方法,它主要包含5个步骤,即管道实例分割、管道初始段提取和参数化、管道段正截面方向外部点搜索、管道段全方位最小间隙点搜索和最小间隙计算、以及管道全长度范围的各段最小间隙测量。
本发明方法在航空发动机三维点云模型上进行了测试,可测量出发动机体上分布的多条自由弯曲管道全长度范围的最小间隙,测量精度可达0.0071mm在管道表面点云的高斯噪声水平为均值0,标准差0.02mm的情况下,对杂乱背景具有较好的抵抗性,适用于待测管道在场景中处于任意空间、自由弯曲的多样化几何状态。
因此,本发明具有理论可行性和实践有效性。
本发明依托三维点云数据进行三维模态下的管道测量,避免了环境光照、阴影、视角遮挡对测量过程的干扰,具有更强的环境适应性,尤其适用于大型复杂场景中的多自由弯曲管道的间隙测量。
00


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 基于 三维 航空发动机 管路 范围 间隙 测量方法 应用
 冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰豆网所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 江南大学现代远程教育 考试大作业1.docx
江南大学现代远程教育 考试大作业1.docx
-
江南大学《信息安全概论》大作业答案.docx
-
江南大学现代远程教育考试大作业.docx
-
江南大学现代远程教育2020年上半年课程考试大作业.docx
-
2020年江南大学信息安全概论大作业答案.docx
-
江南大学现代远程教育2020年上半年课程考试大作业..docx
-
江南大学现代远程教育 考试大作业.docx
-
兽医师执业活动年度报告登记表.docx
 美术开学第一课-二年级.pptx
美术开学第一课-二年级.pptx
-
中小学教师中高级职称答辩备考试题及答案.docx
-
安卓课程设计-手机通讯录系统.doc
-
名师选拔笔试试题.docx
-
2021年全国普通高等学校运动训练、民族传统体育专业单独统.docx
-
成人失禁相关性皮炎护理实践专家共识解读.pptx
-
人音版音乐六年级下册全册表格式教学设计.docx
-
教师职称学科带头人笔试面试参考题.docx
-
骨干教师选拔笔试试题初稿.docx
-
行政法学判断题.docx
-
动物诊疗机构年度报告登记表.docx
-
好学生好学法读后感.docx
-
房屋买卖合同(详细范本).docx
-
高中寒假开学第一课.pptx
-
XX工程项目管理规划大纲.docx
-
纳税基础与实务(说课课件).pptx
-
美术素描课程标准.docx
-
最新部编人教版小学五年级下册语文全册备课教案设计及板书反思.docx
-
植物组织培养教学设计.docx
-
老年科健康教育.docx
-
紧盯“双碳”目标走好绿色低碳“赶考路”PPT课件.pptx
-
肿瘤的绿色治疗.ppt
-
摄影摄像课程标准.docx
-
植物组织培养教案.docx
-
电子商务清华出版第3章.ppt
-
主题班会课件:环保教育主题班会环境保护.ppt
-
主题班会课件.ppt
-
主题班会行为篇《自由与规则》PPT课件.ppt
-
电子商务概论).ppt
-
电子商务网站建设与管理-电子教案PPT版第二章.ppt
-
主题班会:新年新气象ppt.ppt
-
九年级上期开学课件.ppt
-
主题班会:青春期教育优秀课件ppt.ppt
-
九年级政治我国的基本经济制度(1).ppt
-
九年级科学恒星的一生.ppt
-
九年级思想品德宪法是国家的根本大法.ppt
-
电子封装-绪论.ppt
-
电工学(第七版)上册秦曾煌第三章.ppt
-
九年级化学上册第六单元复习课课件.ppt
-
九年级家长会2017.10.06.ppt
-
九年级安全教育--第6课--发生重大传染病疫情怎么办--第2课时.ppt
-
九年级化学金属的化学性质1.ppt
-
九年级学困生座谈会.ppt
